
作业车辆路径跟踪控制方法、装置、电子装置和存储介质.pdf

大渊****公主


1/10
2/10

3/10

4/10
5/10

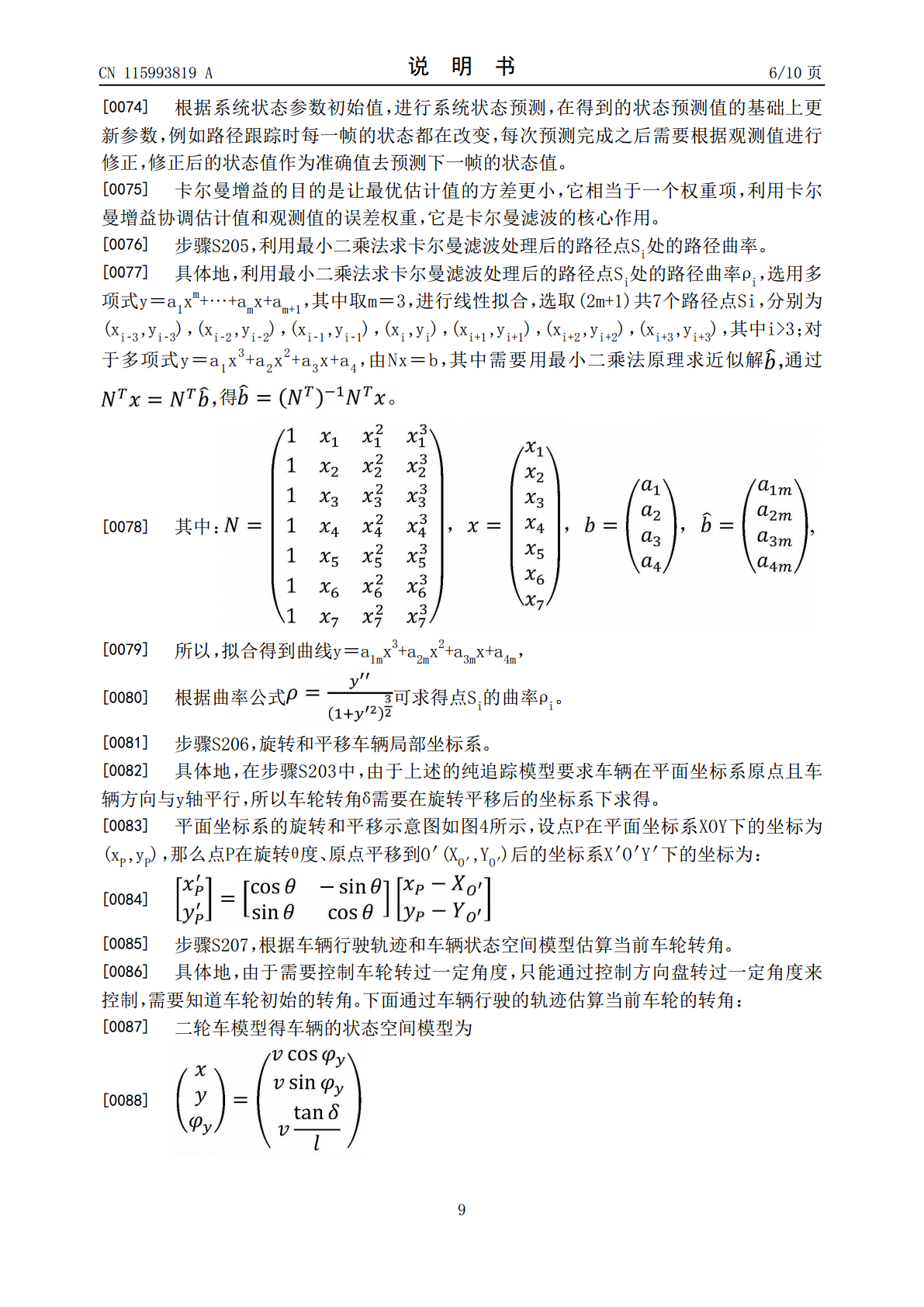
6/10
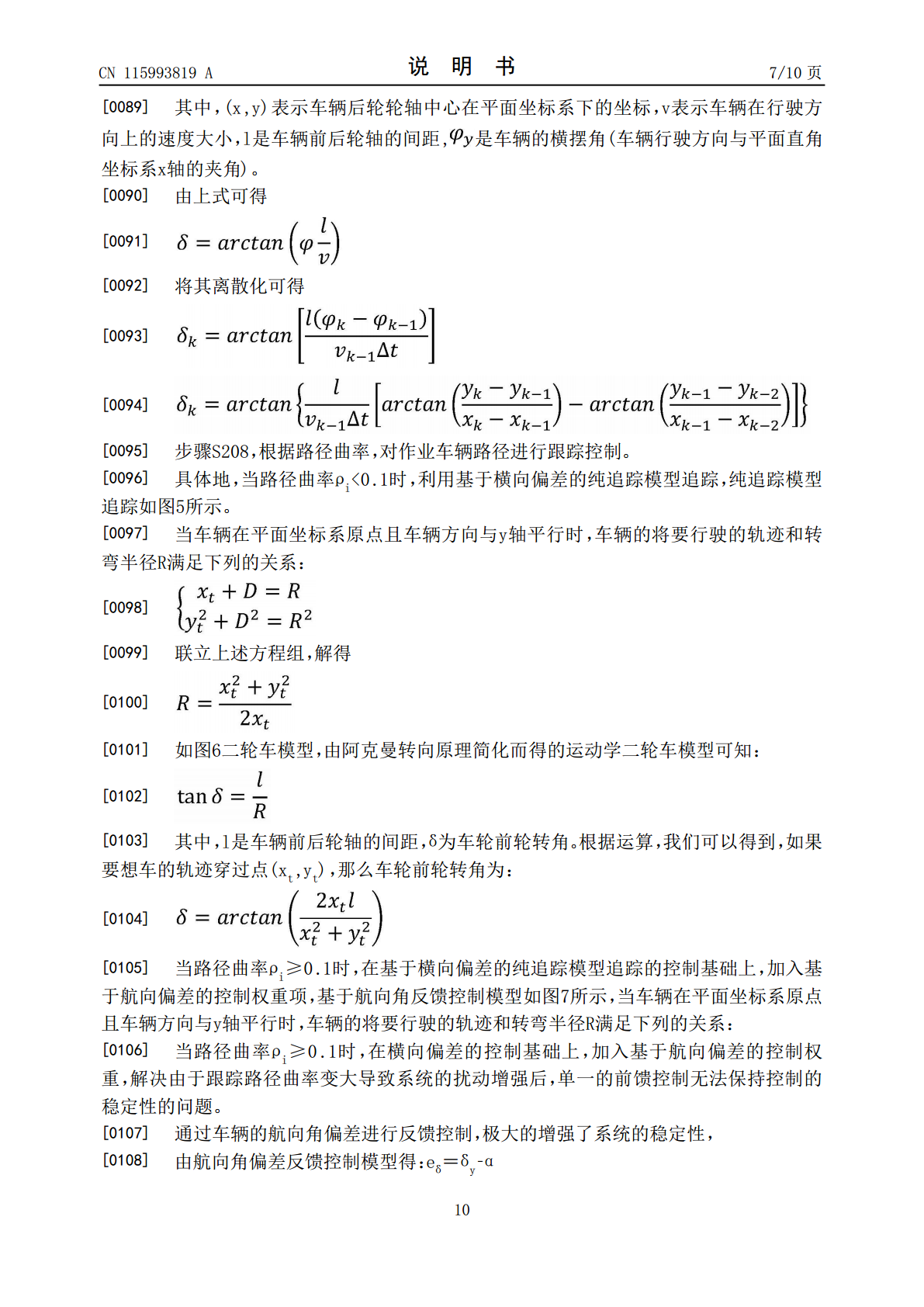
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
作业车辆路径跟踪控制方法、装置、电子装置和存储介质.pdf
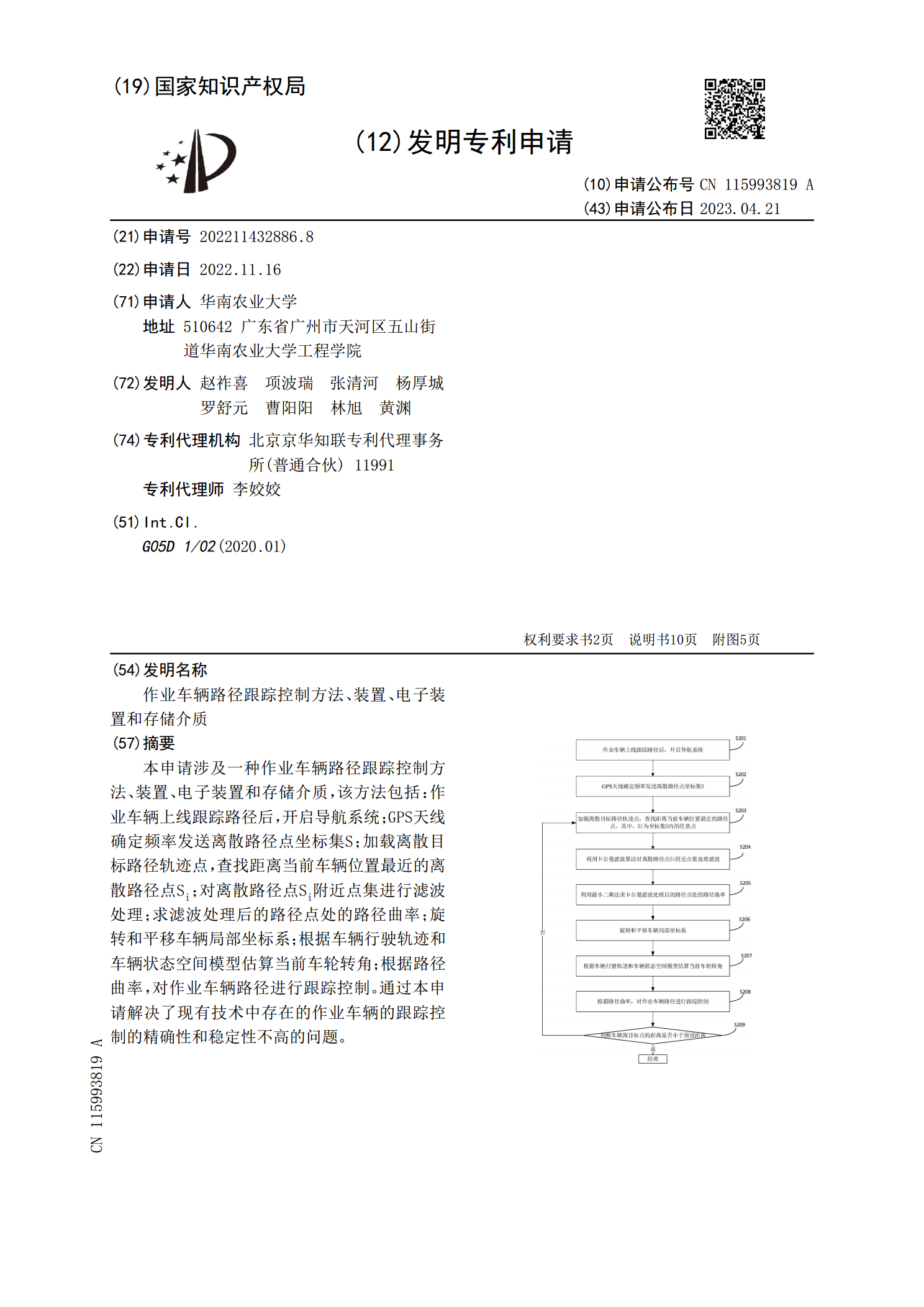
本申请涉及一种作业车辆路径跟踪控制方法、装置、电子装置和存储介质,该方法包括:作业车辆上线跟踪路径后,开启导航系统;GPS天线确定频率发送离散路径点坐标集S;加载离散目标路径轨迹点,查找距离当前车辆位置最近的离散路径点S
路径跟踪方法、装置、车辆及存储介质.pdf
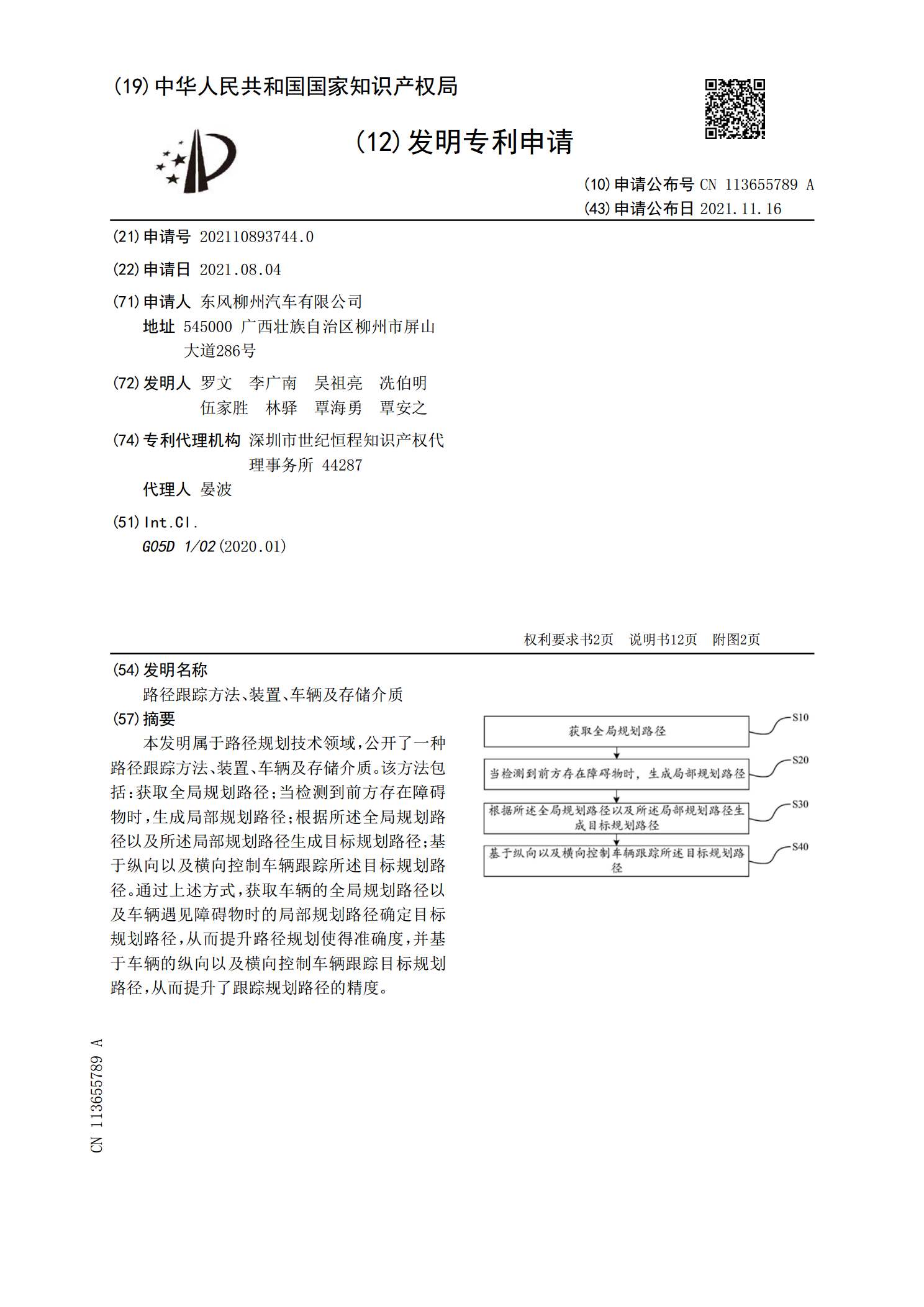
本发明属于路径规划技术领域,公开了一种路径跟踪方法、装置、车辆及存储介质。该方法包括:获取全局规划路径;当检测到前方存在障碍物时,生成局部规划路径;根据所述全局规划路径以及所述局部规划路径生成目标规划路径;基于纵向以及横向控制车辆跟踪所述目标规划路径。通过上述方式,获取车辆的全局规划路径以及车辆遇见障碍物时的局部规划路径确定目标规划路径,从而提升路径规划使得准确度,并基于车辆的纵向以及横向控制车辆跟踪目标规划路径,从而提升了跟踪规划路径的精度。
路径规划方法、装置、存储介质和电子装置.pdf
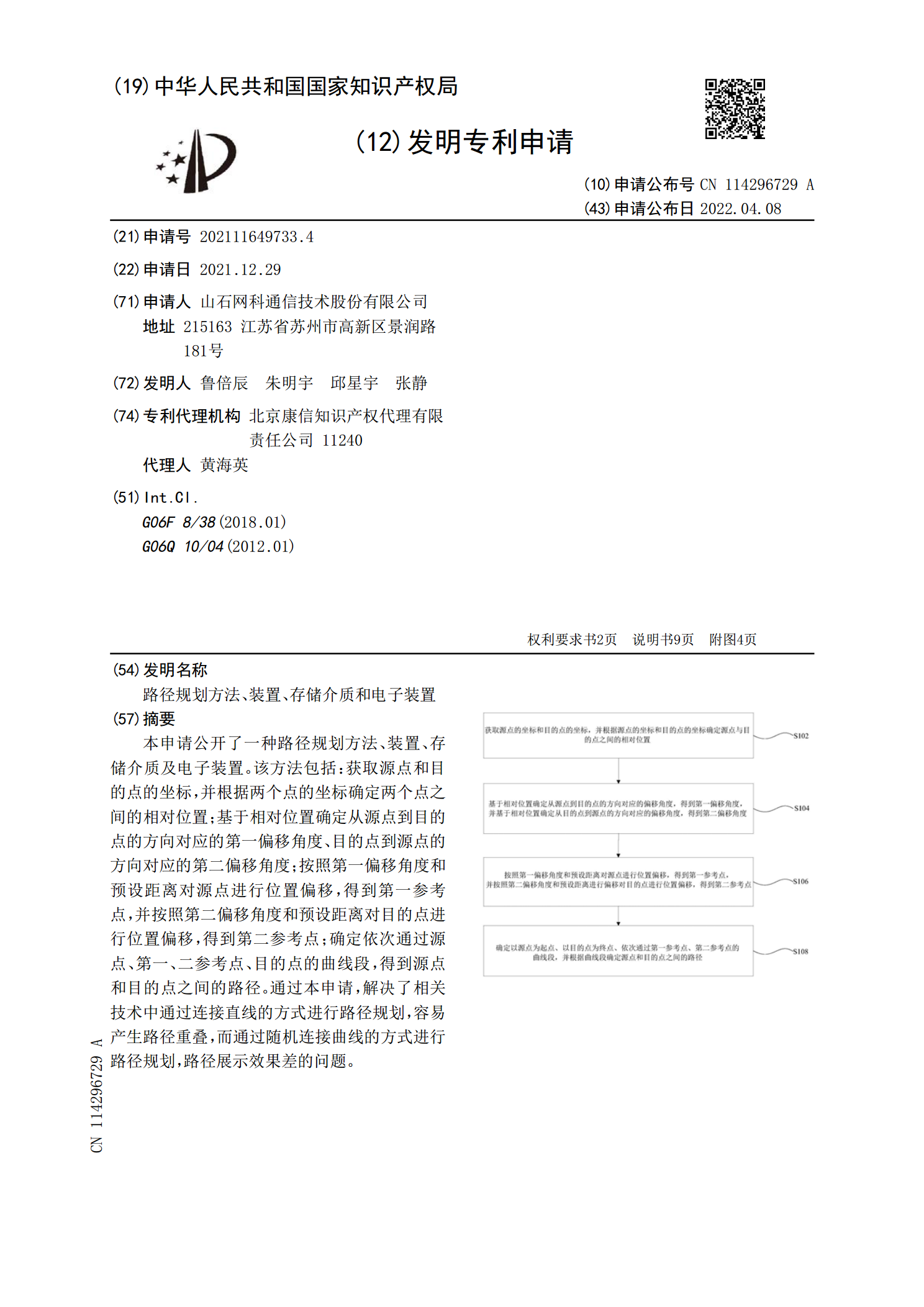
本申请公开了一种路径规划方法、装置、存储介质及电子装置。该方法包括:获取源点和目的点的坐标,并根据两个点的坐标确定两个点之间的相对位置;基于相对位置确定从源点到目的点的方向对应的第一偏移角度、目的点到源点的方向对应的第二偏移角度;按照第一偏移角度和预设距离对源点进行位置偏移,得到第一参考点,并按照第二偏移角度和预设距离对目的点进行位置偏移,得到第二参考点;确定依次通过源点、第一、二参考点、目的点的曲线段,得到源点和目的点之间的路径。通过本申请,解决了相关技术中通过连接直线的方式进行路径规划,容易产生路径重
路径规划方法、装置、电子装置和存储介质.pdf
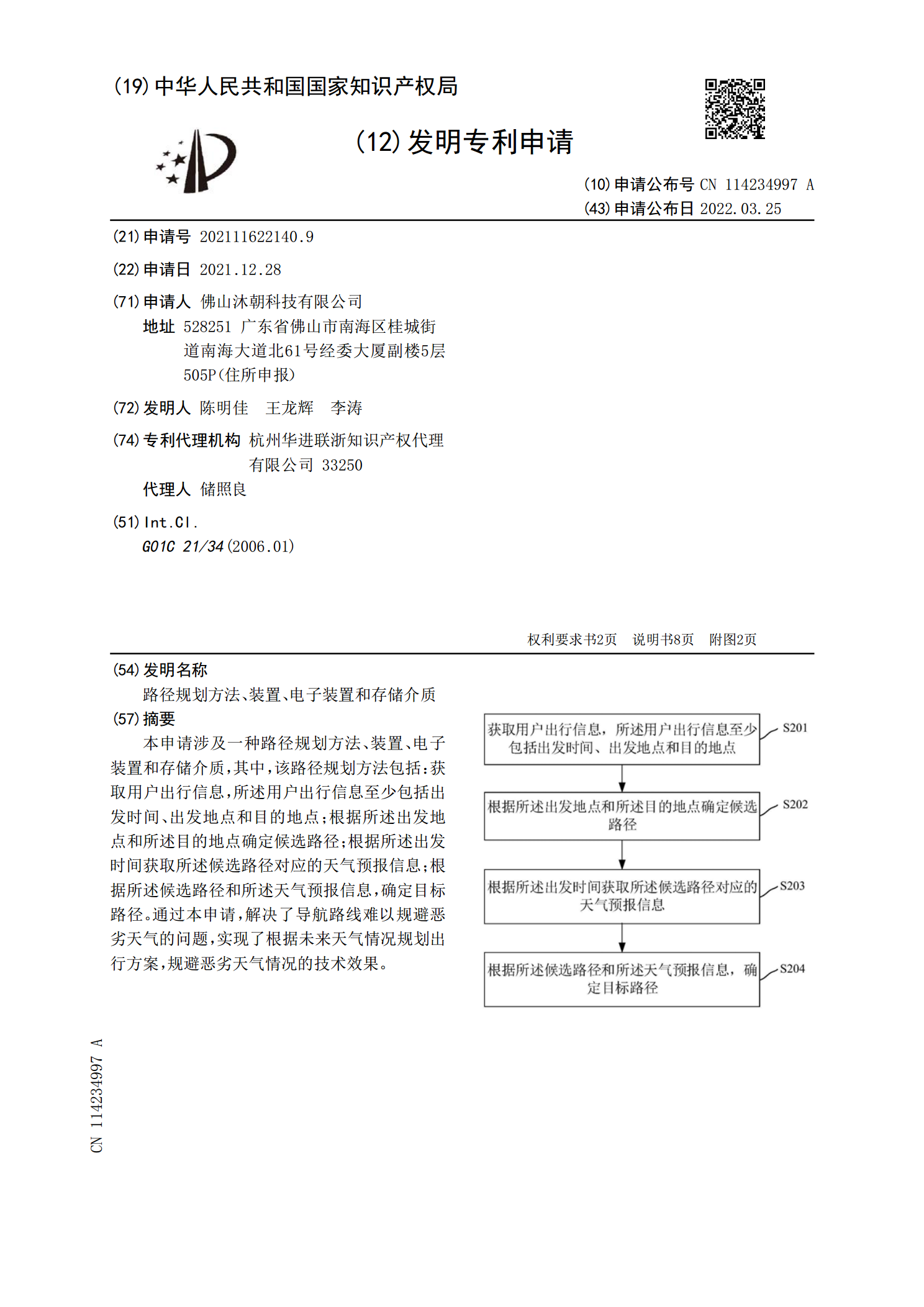
本申请涉及一种路径规划方法、装置、电子装置和存储介质,其中,该路径规划方法包括:获取用户出行信息,所述用户出行信息至少包括出发时间、出发地点和目的地点;根据所述出发地点和所述目的地点确定候选路径;根据所述出发时间获取所述候选路径对应的天气预报信息;根据所述候选路径和所述天气预报信息,确定目标路径。通过本申请,解决了导航路线难以规避恶劣天气的问题,实现了根据未来天气情况规划出行方案,规避恶劣天气情况的技术效果。

对象跟踪方法和装置、存储介质及电子装置.pdf
本发明公开了一种对象跟踪方法和装置、存储介质及电子装置。该方法包括:获取至少一个图像采集设备采集到的至少一张图像;根据至少一张图像获取目标对象的第一外观特征和目标对象的第一时空特征;获取目标对象与当前已记录的全局跟踪对象队列中每个全局跟踪对象之间的外观相似度和时空相似度;在根据外观相似度和时空相似度确定出目标对象与目标全局跟踪对象相匹配的情况下,为目标对象分配与目标全局跟踪对象对应的目标全局标识;利用目标全局标识确定与目标对象关联的多个图像采集设备所采集到的多张关联图像;根据多张关联图像生成与目标对象相匹