
用于自动泊车的方法、装置、设备和计算机可读存储介质.pdf

高格****gu

1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于自动泊车的方法、装置、设备和计算机可读存储介质.pdf
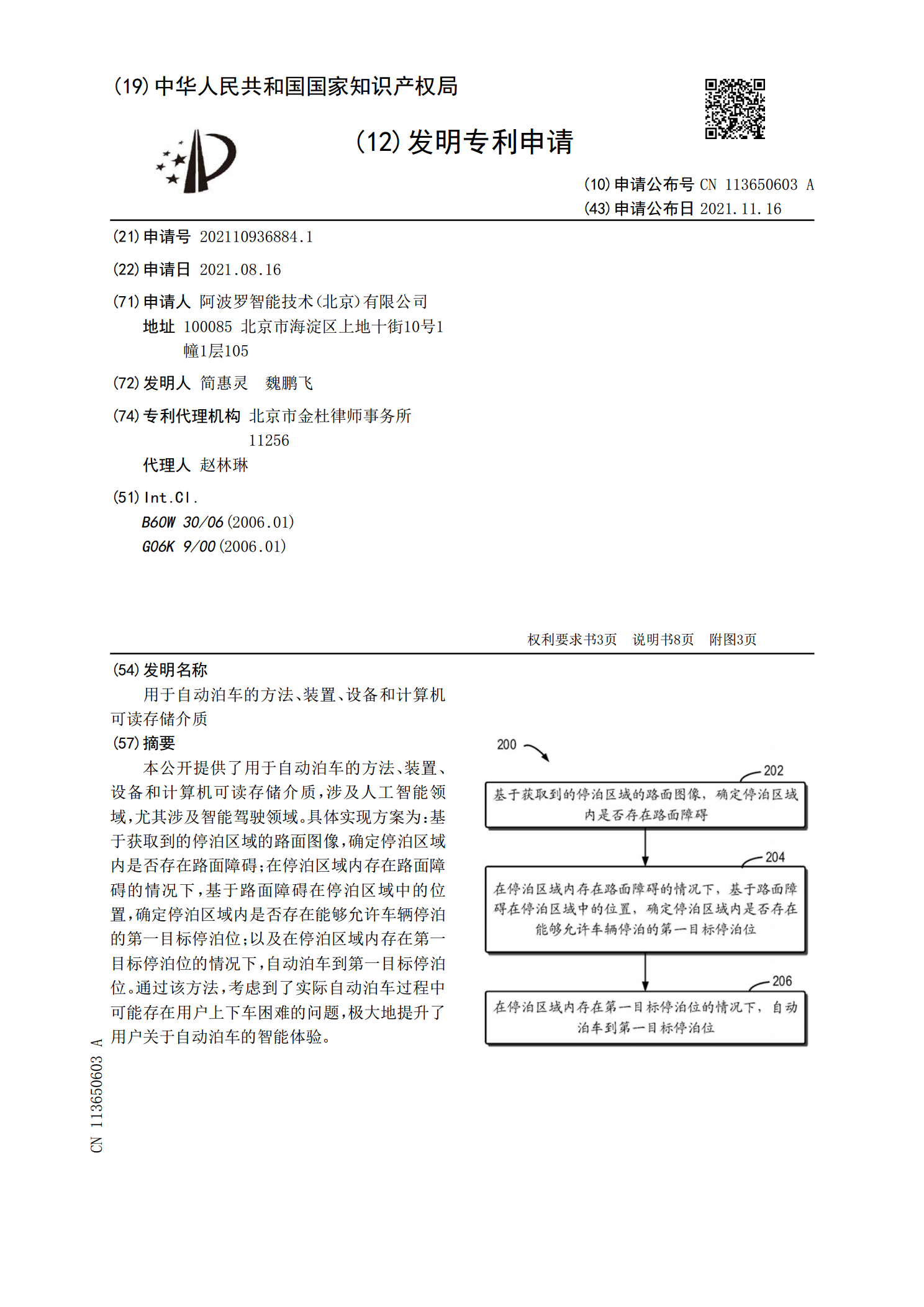
本公开提供了用于自动泊车的方法、装置、设备和计算机可读存储介质,涉及人工智能领域,尤其涉及智能驾驶领域。具体实现方案为:基于获取到的停泊区域的路面图像,确定停泊区域内是否存在路面障碍;在停泊区域内存在路面障碍的情况下,基于路面障碍在停泊区域中的位置,确定停泊区域内是否存在能够允许车辆停泊的第一目标停泊位;以及在停泊区域内存在第一目标停泊位的情况下,自动泊车到第一目标停泊位。通过该方法,考虑到了实际自动泊车过程中可能存在用户上下车困难的问题,极大地提升了用户关于自动泊车的智能体验。
泊车方法、泊车装置、车辆和计算机可读存储介质.pdf
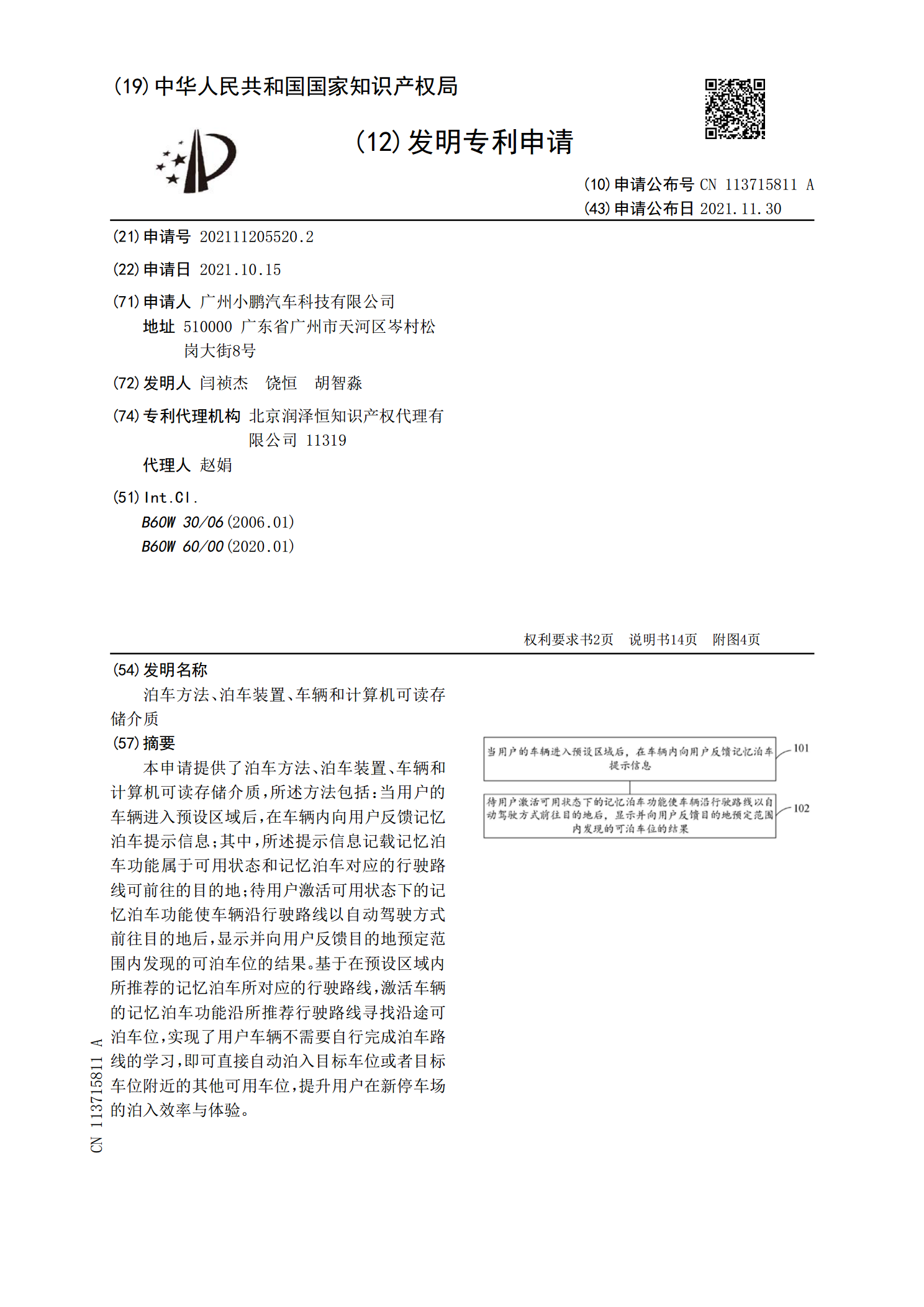
本申请提供了泊车方法、泊车装置、车辆和计算机可读存储介质,所述方法包括:当用户的车辆进入预设区域后,在车辆内向用户反馈记忆泊车提示信息;其中,所述提示信息记载记忆泊车功能属于可用状态和记忆泊车对应的行驶路线可前往的目的地;待用户激活可用状态下的记忆泊车功能使车辆沿行驶路线以自动驾驶方式前往目的地后,显示并向用户反馈目的地预定范围内发现的可泊车位的结果。基于在预设区域内所推荐的记忆泊车所对应的行驶路线,激活车辆的记忆泊车功能沿所推荐行驶路线寻找沿途可泊车位,实现了用户车辆不需要自行完成泊车路线的学习,即可直
自动泊车路径规划方法、装置、设备及可读存储介质.pdf
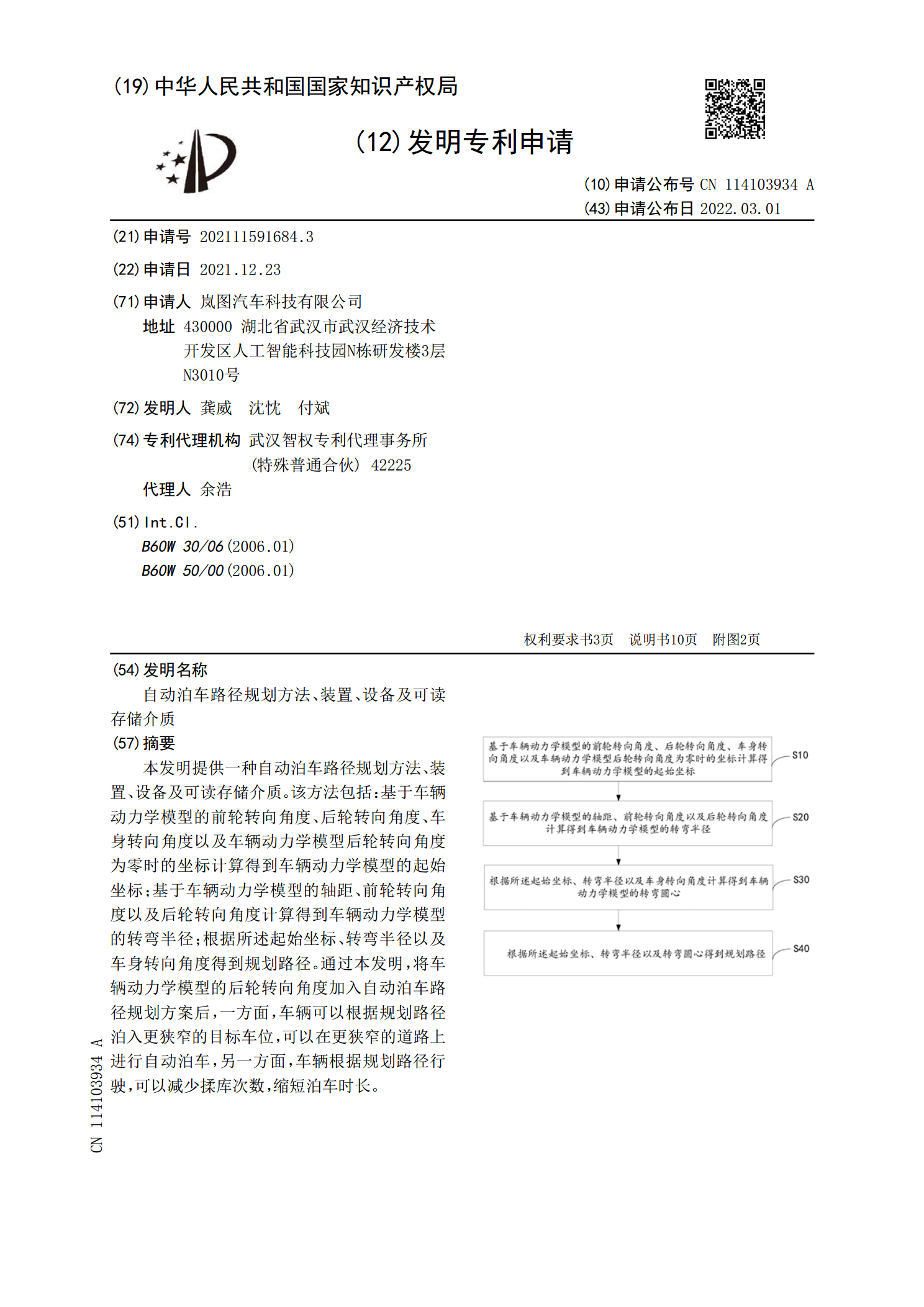
本发明提供一种自动泊车路径规划方法、装置、设备及可读存储介质。该方法包括:基于车辆动力学模型的前轮转向角度、后轮转向角度、车身转向角度以及车辆动力学模型后轮转向角度为零时的坐标计算得到车辆动力学模型的起始坐标;基于车辆动力学模型的轴距、前轮转向角度以及后轮转向角度计算得到车辆动力学模型的转弯半径;根据所述起始坐标、转弯半径以及车身转向角度得到规划路径。通过本发明,将车辆动力学模型的后轮转向角度加入自动泊车路径规划方案后,一方面,车辆可以根据规划路径泊入更狭窄的目标车位,可以在更狭窄的道路上进行自动泊车,另
车辆及其泊车方法、泊车装置和计算机可读存储介质.pdf
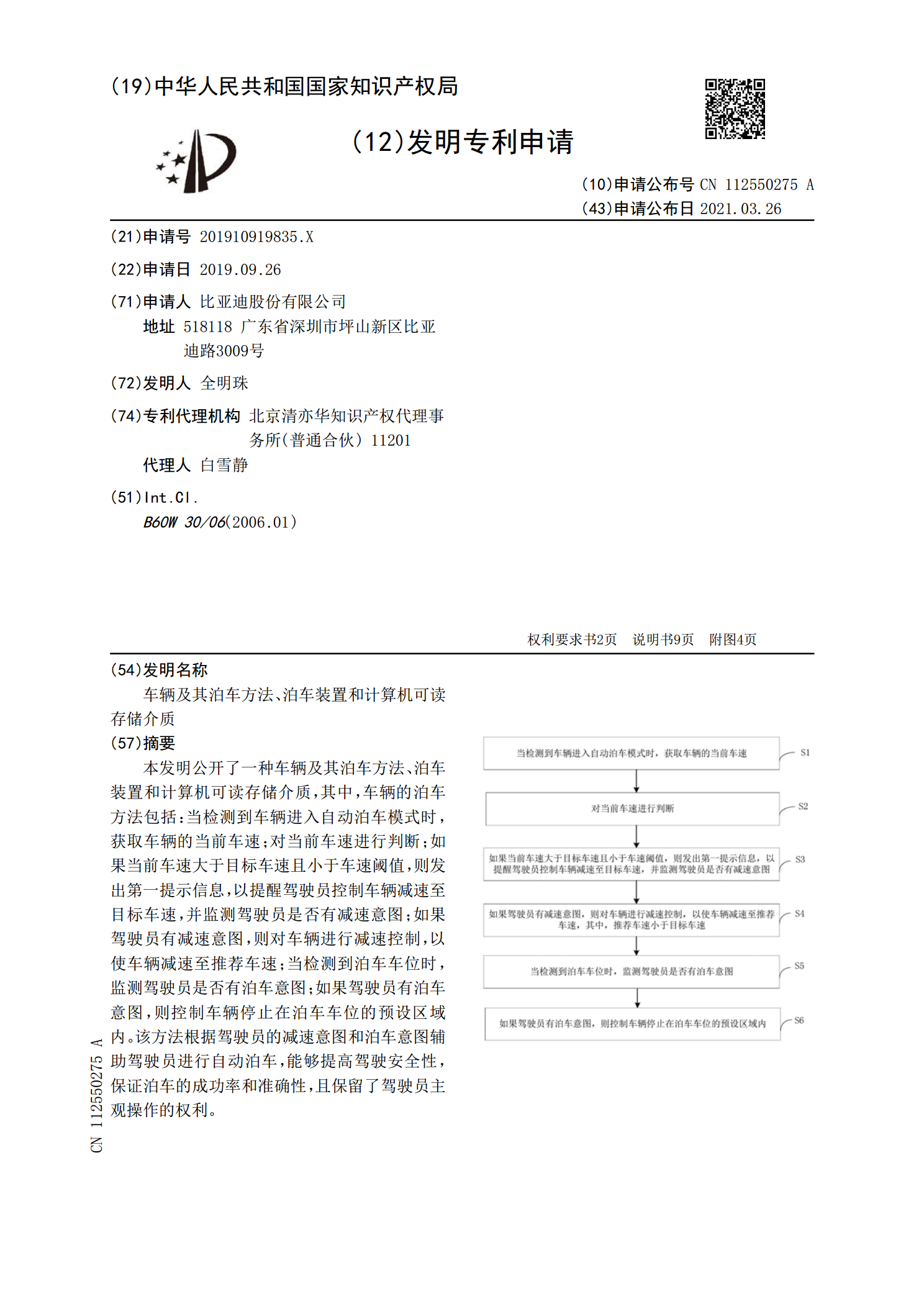
本发明公开了一种车辆及其泊车方法、泊车装置和计算机可读存储介质,其中,车辆的泊车方法包括:当检测到车辆进入自动泊车模式时,获取车辆的当前车速;对当前车速进行判断;如果当前车速大于目标车速且小于车速阈值,则发出第一提示信息,以提醒驾驶员控制车辆减速至目标车速,并监测驾驶员是否有减速意图;如果驾驶员有减速意图,则对车辆进行减速控制,以使车辆减速至推荐车速;当检测到泊车车位时,监测驾驶员是否有泊车意图;如果驾驶员有泊车意图,则控制车辆停止在泊车车位的预设区域内。该方法根据驾驶员的减速意图和泊车意图辅助驾驶员进行
自动泊车方法、系统、设备及计算机可读存储介质.pdf
本发明提供一种自动泊车方法、系统、设备及计算机可读存储介质,所述自动泊车方法包括:在接收到自动泊车指令后,获取与选择泊车模式相关的车辆泊车信息;判定该车辆泊车信息所属等级,以根据车辆泊车信息的等级选择与之等级对应的泊车模式,并进入该对应等级的泊车模式。本发明所述自动泊车方法、系统、设备及计算机可读存储介质弥补了自动驾驶车辆在封闭区域没有地图或有地图无室内定位场景时泊车功能的缺失,增加了自动驾驶车辆在自动泊车功能启动异常时的解决方案,提高自动驾驶车辆泊车功能启动的及时性及用户体验的提升。