
自动泊车路径规划方法、装置、设备及可读存储介质.pdf

森林****io

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动泊车路径规划方法、装置、设备及可读存储介质.pdf
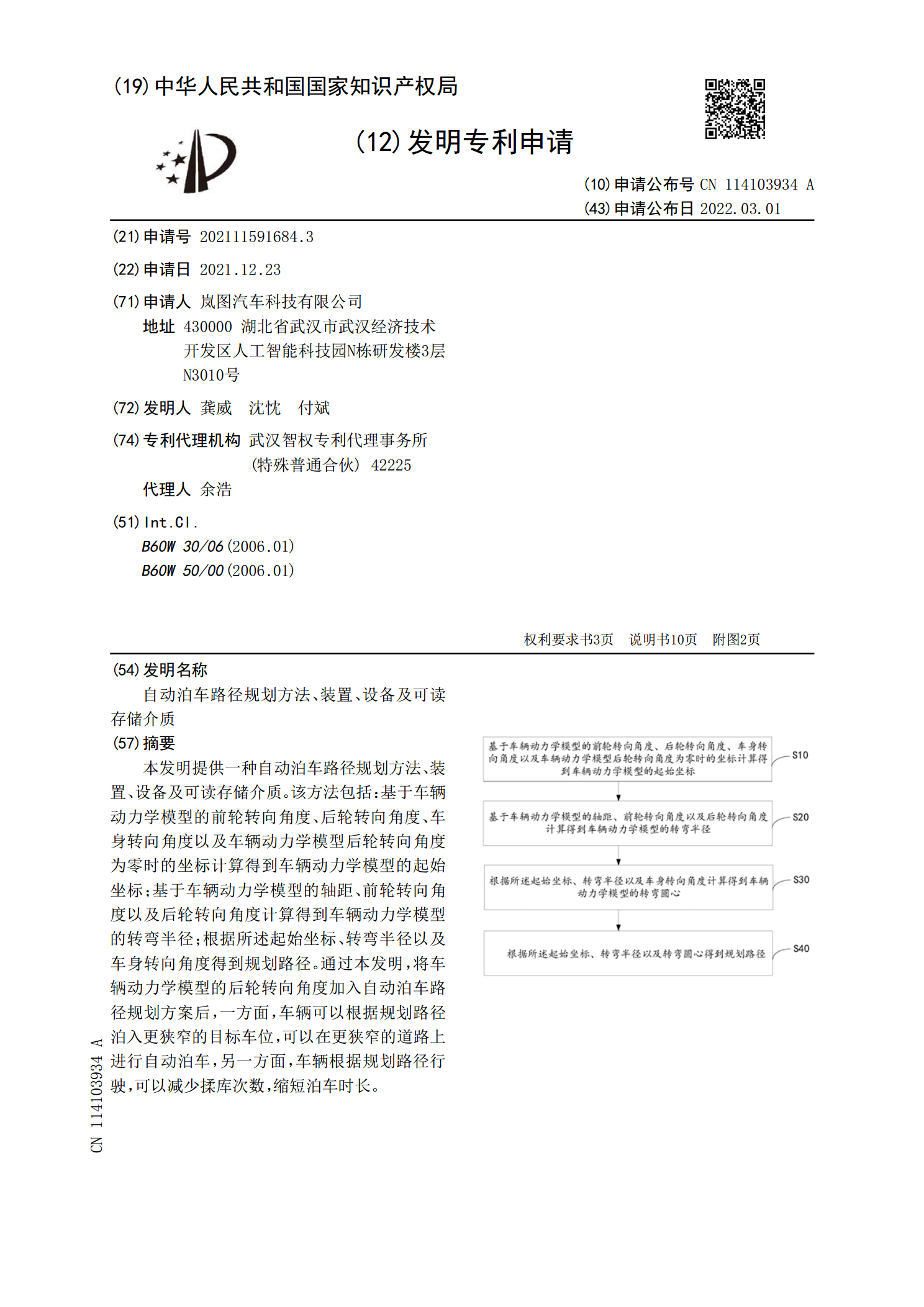
本发明提供一种自动泊车路径规划方法、装置、设备及可读存储介质。该方法包括:基于车辆动力学模型的前轮转向角度、后轮转向角度、车身转向角度以及车辆动力学模型后轮转向角度为零时的坐标计算得到车辆动力学模型的起始坐标;基于车辆动力学模型的轴距、前轮转向角度以及后轮转向角度计算得到车辆动力学模型的转弯半径;根据所述起始坐标、转弯半径以及车身转向角度得到规划路径。通过本发明,将车辆动力学模型的后轮转向角度加入自动泊车路径规划方案后,一方面,车辆可以根据规划路径泊入更狭窄的目标车位,可以在更狭窄的道路上进行自动泊车,另

自动泊车路径规划方法、设备及计算机可读存储介质.pdf
本发明公开了一种自动泊车路径规划方法、设备及计算机存储介质,该方法包括:获得待规划路径所在场所的平面环境信息,并基于所述平面环境信息确定第一规划路线;其中,所述平面环境信息包括车辆的当前位置和目标车位;对第一规划路线中的转弯路段依所述车辆的转向能力进行优化,使得优化后的转弯路段满足曲率连续;将所述优化后的第一规划路线中的各路线元素的存储顺序依车辆行进方向进行调整,得到用于所述车辆自动泊车的第二规划路线;本发明实施例的路径规划过程中约束简单,能有效提高路径规划速度、降低路径规划难度。
泊车路径规划方法、泊车路径规划装置、车辆及存储介质.pdf
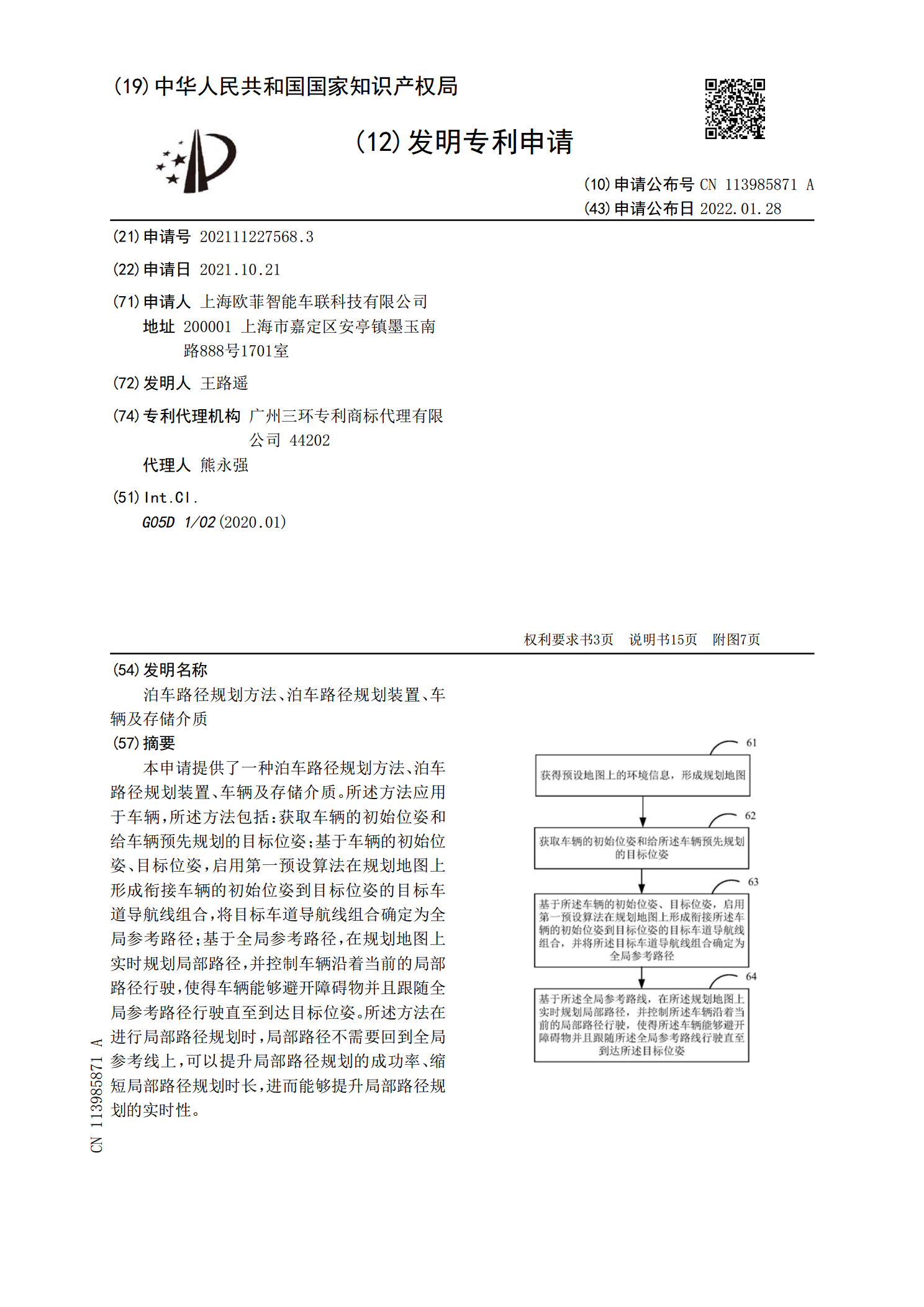
本申请提供了一种泊车路径规划方法、泊车路径规划装置、车辆及存储介质。所述方法应用于车辆,所述方法包括:获取车辆的初始位姿和给车辆预先规划的目标位姿;基于车辆的初始位姿、目标位姿,启用第一预设算法在规划地图上形成衔接车辆的初始位姿到目标位姿的目标车道导航线组合,将目标车道导航线组合确定为全局参考路径;基于全局参考路径,在规划地图上实时规划局部路径,并控制车辆沿着当前的局部路径行驶,使得车辆能够避开障碍物并且跟随全局参考路径行驶直至到达目标位姿。所述方法在进行局部路径规划时,局部路径不需要回到全局参考线上,可

自动泊车方法、系统及可读存储介质.pdf
本发明公开了一种自动泊车方法、系统及可读存储介质,该方法包括步骤:响应于第一设备发送的开始泊车指令,获取车内人员情况信息,并确定所述车内人员情况信息是否满足预设泊车条件;若满足,则接管对车辆的控制功能;获取预设泊车路线,并基于所述预设泊车路线和所述控制功能,对所述车辆进行泊车。实现了在响应第一设备发送的开始泊车指令之后,自动获取车内人员情况信息,并在车内人员情况信息满足预设泊车条件时,才接管对车辆的控制功能以及获取预设泊车路线以进行泊车。避免了在泊车过程中,对仍然留在车内的人员造成伤害,进而提高了车辆的自
路径规划方法、装置、电子设备及可读存储介质.pdf
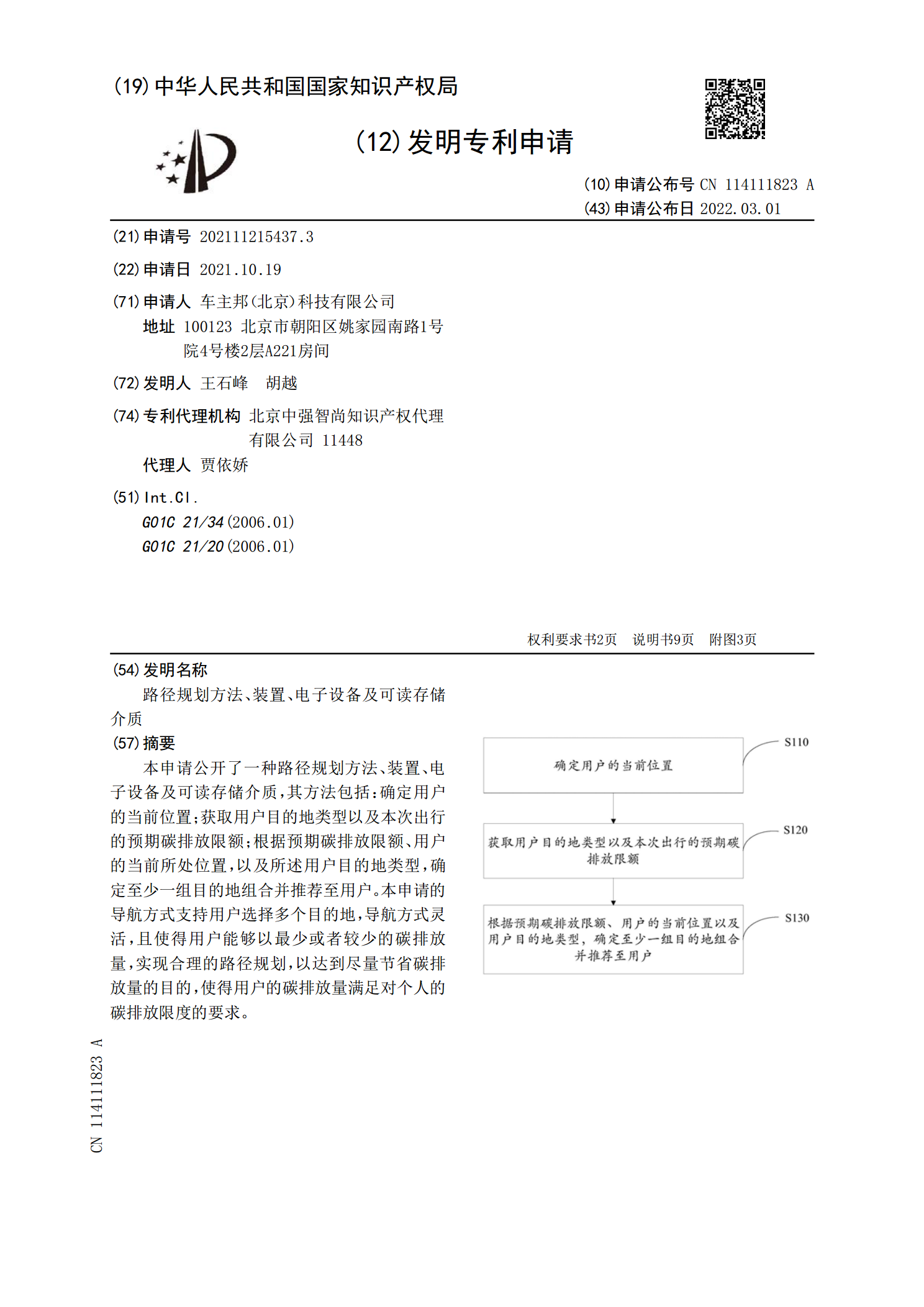
本申请公开了一种路径规划方法、装置、电子设备及可读存储介质,其方法包括:确定用户的当前位置;获取用户目的地类型以及本次出行的预期碳排放限额;根据预期碳排放限额、用户的当前所处位置,以及所述用户目的地类型,确定至少一组目的地组合并推荐至用户。本申请的导航方式支持用户选择多个目的地,导航方式灵活,且使得用户能够以最少或者较少的碳排放量,实现合理的路径规划,以达到尽量节省碳排放量的目的,使得用户的碳排放量满足对个人的碳排放限度的要求。