
车载毫米波雷达俯仰角误差校准方法、装置、存储介质及电子设备.pdf

白凡****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车载毫米波雷达俯仰角误差校准方法、装置、存储介质及电子设备.pdf
本发明公开了一种车载毫米波雷达俯仰角误差校准方法、装置及电子设备。本发明所公开的方法、装置及电子设备通过车载毫米波雷达输出的对目标检测点的探测数据获得所述目标检测点相对于所述雷达的位置参数,并基于所述场视角参数确定基准检测点相对于所述雷达的位置参数,根据所述目标检测点的位置参数和所述基准检测点的位置参数计算所述车载毫米波雷达的信号发射点与所述目标检测点的连线和所述车载毫米波雷达的信号发射点与所述基准检测点的连线之间的角度差,基于所述角度差对所述车载毫米波雷达的俯仰角误差进行校准。由此显著地提高了车载毫米波
车载毫米波雷达俯仰角误差校准方法、装置、存储介质及电子设备.pdf
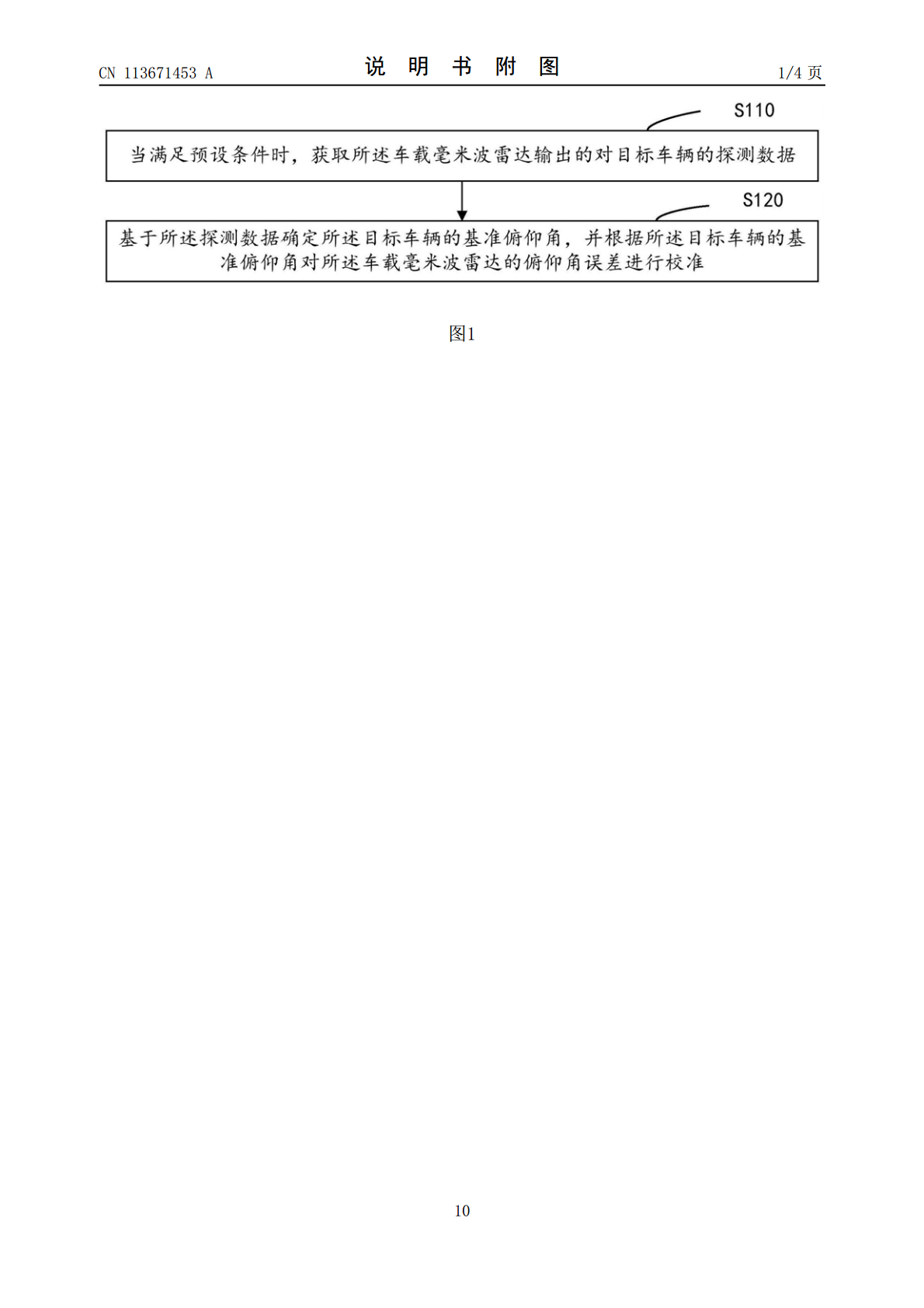
本发明公开了一种车载毫米波雷达俯仰角误差校准方法、装置、存储介质及电子设备,所述方法包括:当满足预设条件时,获取所述车载毫米波雷达输出的对目标车辆的探测数据;基于所述探测数据确定所述目标车辆的基准俯仰角,并根据所述目标车辆的基准俯仰角对所述车载毫米波雷达的俯仰角误差进行校准。本发明所公开的方法、装置及电子设备通过车载毫米波雷达获取有效的目标车辆的实测俯仰角,并基于所述目标车辆的实测俯仰角校准该车载毫米波雷达的俯仰角度,由此显著地提高了车载毫米波雷达俯仰角度校准操作的便捷性和易实现性。
车载毫米波雷达俯仰角误差校准方法、装置及电子设备.pdf
本发明公开了一种车载毫米波雷达俯仰角误差校准方法、装置及电子设备。本发明所公开的方法、装置及电子设备通过车载毫米波雷达输出的针对已知实际位置和实际高度的目标物体的探测数据,并基于所述探测数据计算所述目标物体的探测俯仰角;基于所述车载毫米波雷达的当前实际位置以及所述目标物体的所述实际位置和所述实际高度确定所述目标物体的基准俯仰角,并根据所述目标物体的所述探测俯仰角与所述目标物体的所述基准俯仰角的角度差对所述车载毫米波雷达的俯仰角误差进行校准。由此显著地提高了车载毫米波雷达俯仰角度校准操作的便捷性和易实现性。
车载毫米波雷达俯仰角误差校准方法、装置及电子设备.pdf
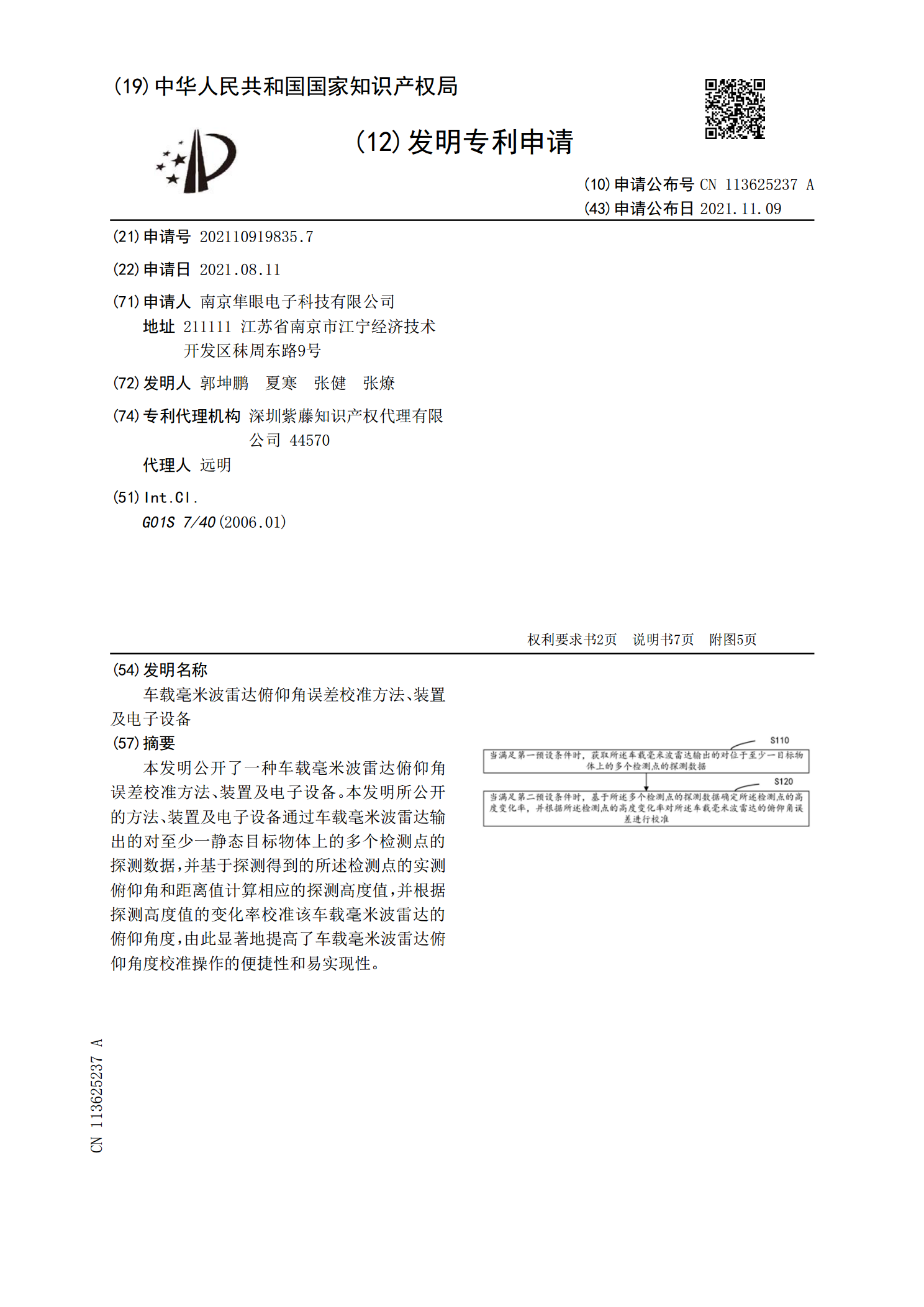
本发明公开了一种车载毫米波雷达俯仰角误差校准方法、装置及电子设备。本发明所公开的方法、装置及电子设备通过车载毫米波雷达输出的对至少一静态目标物体上的多个检测点的探测数据,并基于探测得到的所述检测点的实测俯仰角和距离值计算相应的探测高度值,并根据探测高度值的变化率校准该车载毫米波雷达的俯仰角度,由此显著地提高了车载毫米波雷达俯仰角度校准操作的便捷性和易实现性。
激光雷达的标定校准方法、装置、存储介质及电子设备.pdf
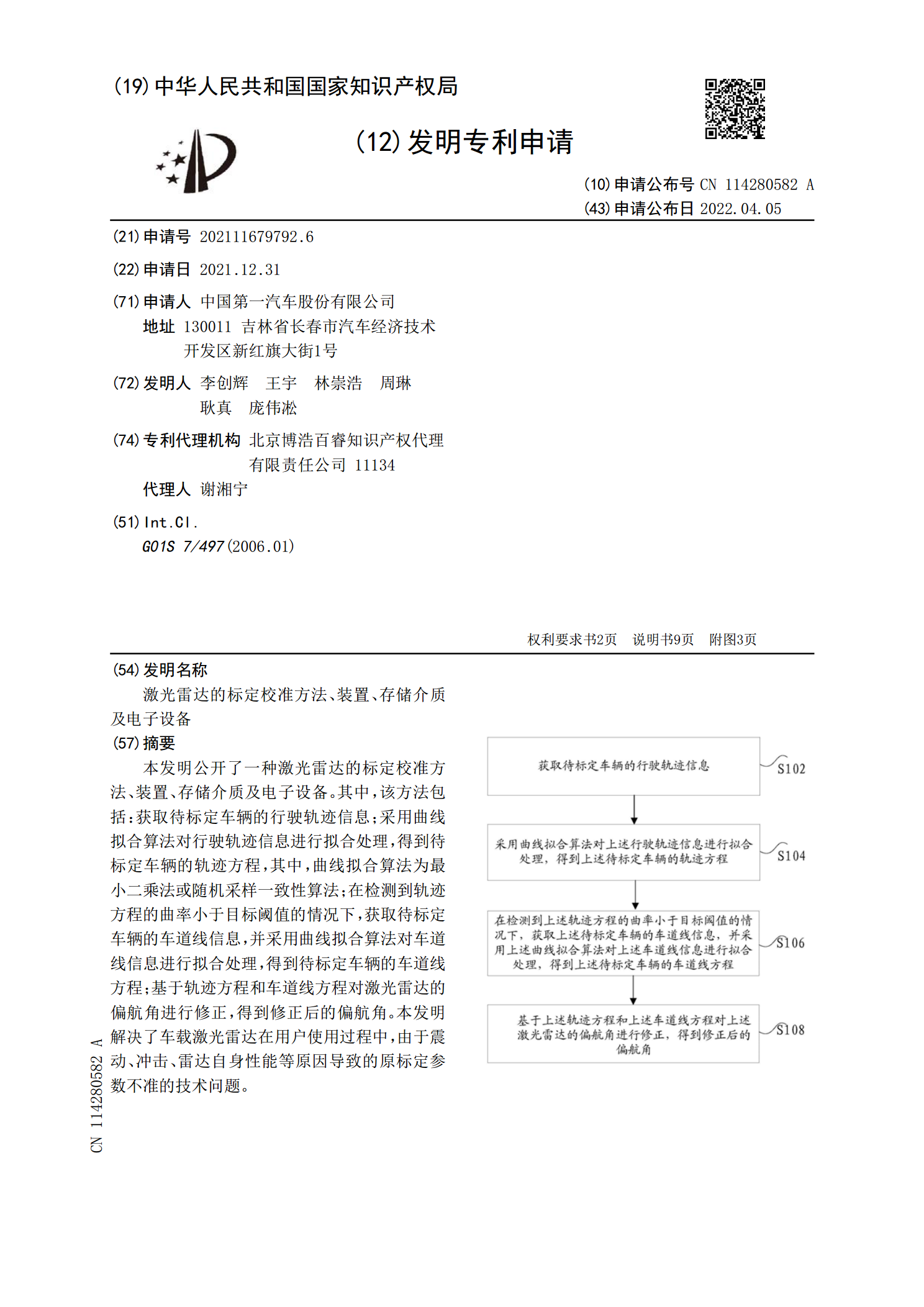
本发明公开了一种激光雷达的标定校准方法、装置、存储介质及电子设备。其中,该方法包括:获取待标定车辆的行驶轨迹信息;采用曲线拟合算法对行驶轨迹信息进行拟合处理,得到待标定车辆的轨迹方程,其中,曲线拟合算法为最小二乘法或随机采样一致性算法;在检测到轨迹方程的曲率小于目标阈值的情况下,获取待标定车辆的车道线信息,并采用曲线拟合算法对车道线信息进行拟合处理,得到待标定车辆的车道线方程;基于轨迹方程和车道线方程对激光雷达的偏航角进行修正,得到修正后的偏航角。本发明解决了车载激光雷达在用户使用过程中,由于震动、冲击、