
激光雷达的标定校准方法、装置、存储介质及电子设备.pdf

宏硕****mo

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光雷达的标定校准方法、装置、存储介质及电子设备.pdf
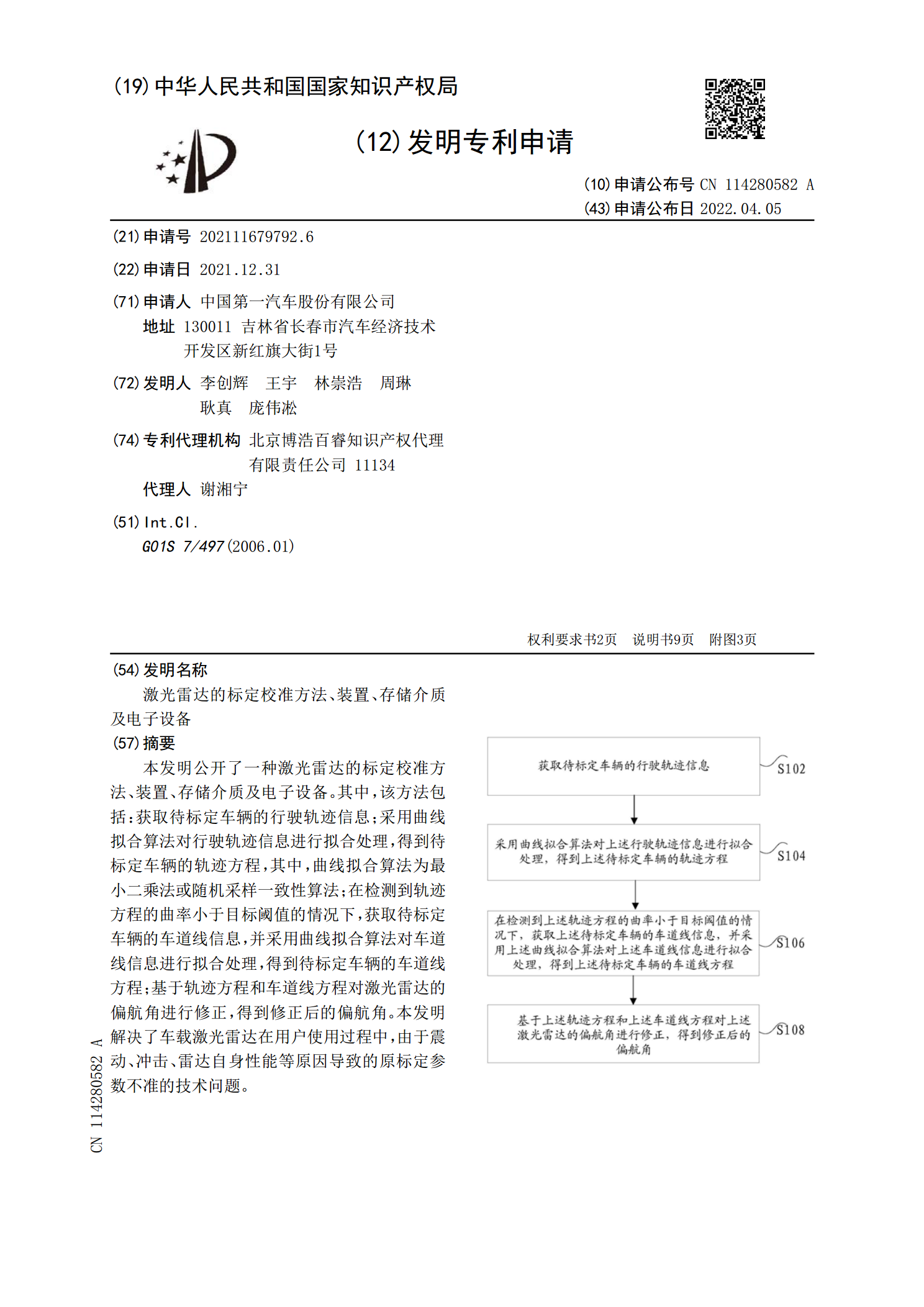
本发明公开了一种激光雷达的标定校准方法、装置、存储介质及电子设备。其中,该方法包括:获取待标定车辆的行驶轨迹信息;采用曲线拟合算法对行驶轨迹信息进行拟合处理,得到待标定车辆的轨迹方程,其中,曲线拟合算法为最小二乘法或随机采样一致性算法;在检测到轨迹方程的曲率小于目标阈值的情况下,获取待标定车辆的车道线信息,并采用曲线拟合算法对车道线信息进行拟合处理,得到待标定车辆的车道线方程;基于轨迹方程和车道线方程对激光雷达的偏航角进行修正,得到修正后的偏航角。本发明解决了车载激光雷达在用户使用过程中,由于震动、冲击、
一种激光雷达的标定方法、装置及存储介质.pdf
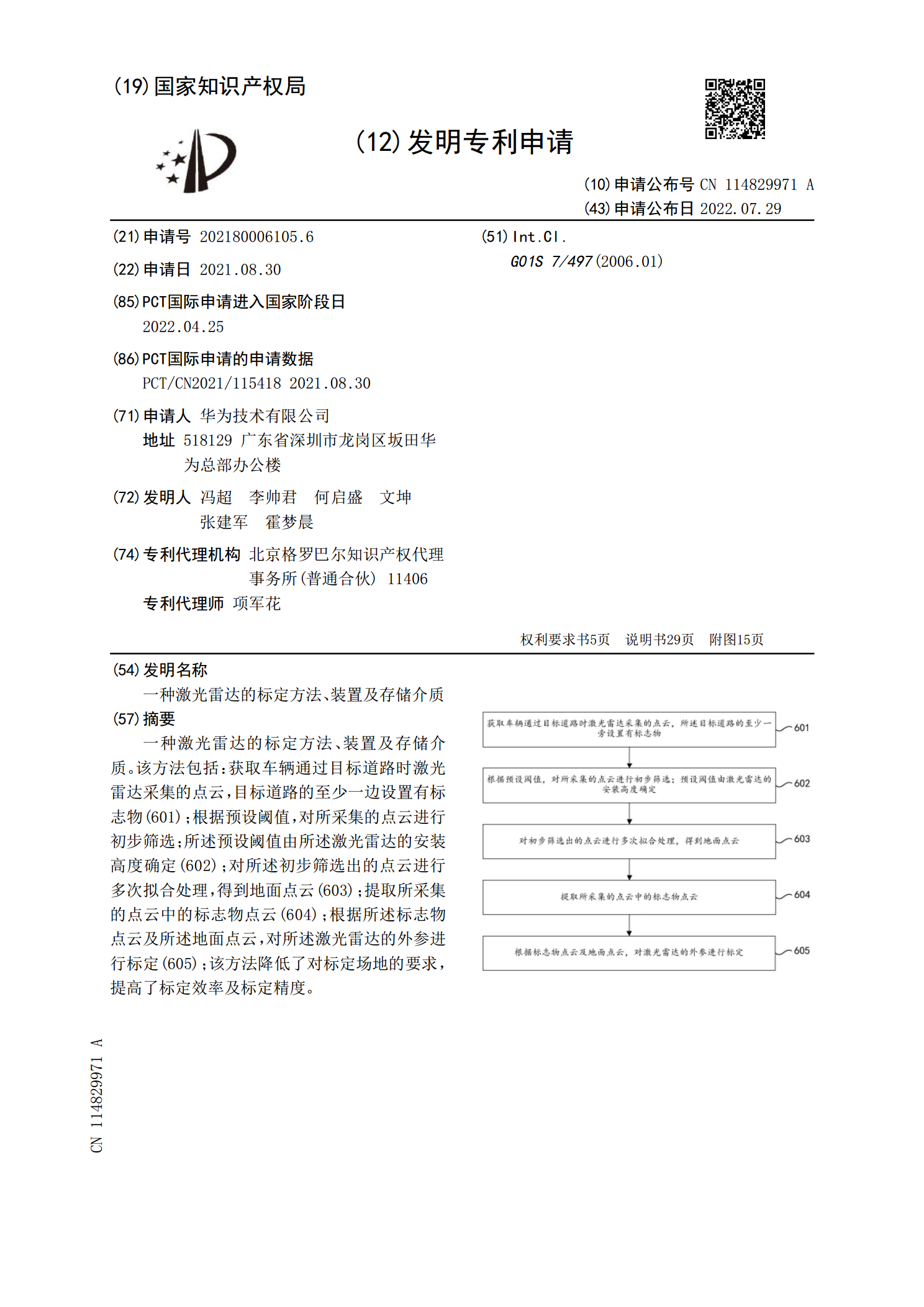
一种激光雷达的标定方法、装置及存储介质。该方法包括:获取车辆通过目标道路时激光雷达采集的点云,目标道路的至少一边设置有标志物(601);根据预设阈值,对所采集的点云进行初步筛选;所述预设阈值由所述激光雷达的安装高度确定(602);对所述初步筛选出的点云进行多次拟合处理,得到地面点云(603);提取所采集的点云中的标志物点云(604);根据所述标志物点云及所述地面点云,对所述激光雷达的外参进行标定(605);该方法降低了对标定场地的要求,提高了标定效率及标定精度。
相机标定方法、装置、电子设备及存储介质.pdf
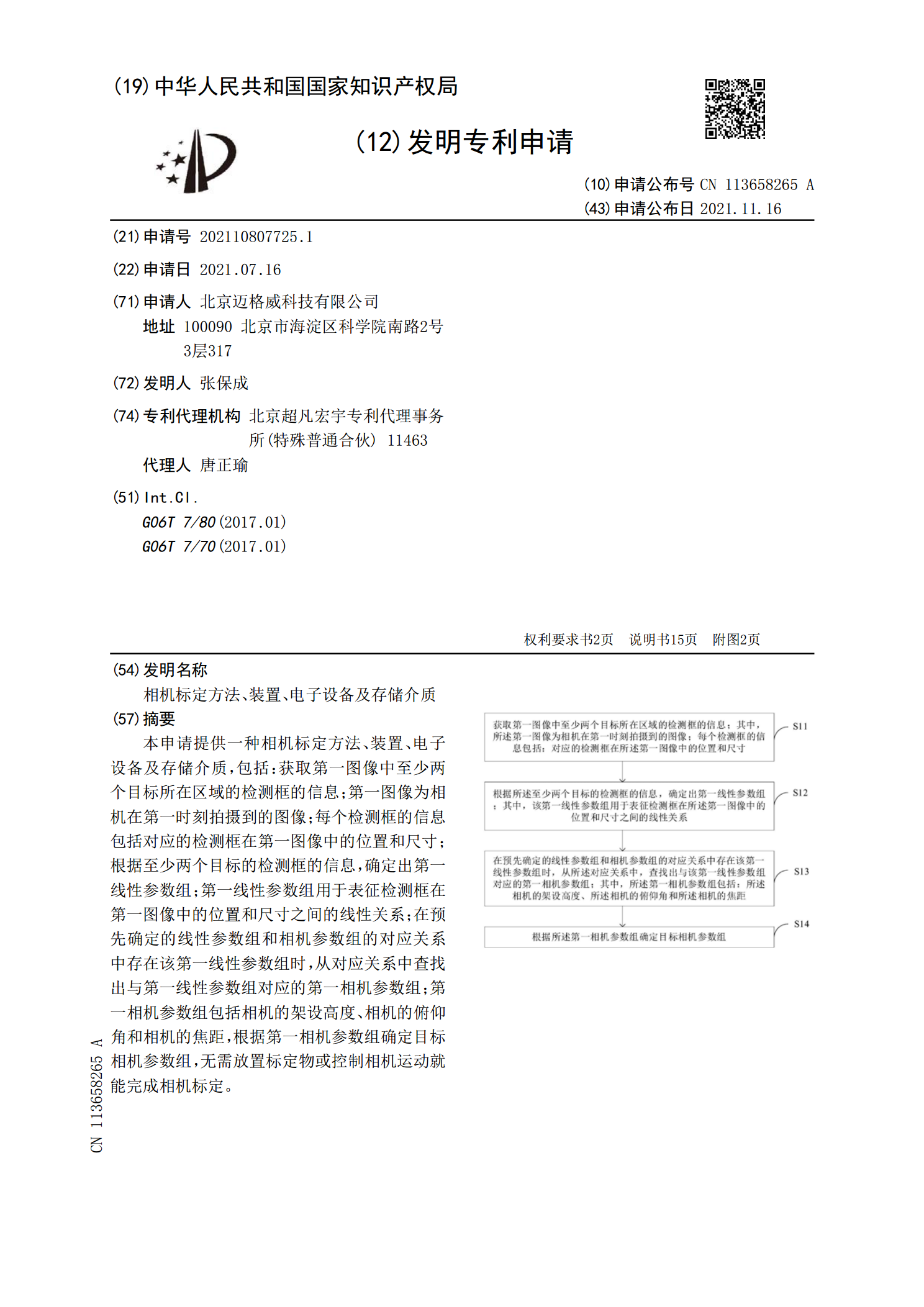
本申请提供一种相机标定方法、装置、电子设备及存储介质,包括:获取第一图像中至少两个目标所在区域的检测框的信息;第一图像为相机在第一时刻拍摄到的图像;每个检测框的信息包括对应的检测框在第一图像中的位置和尺寸;根据至少两个目标的检测框的信息,确定出第一线性参数组;第一线性参数组用于表征检测框在第一图像中的位置和尺寸之间的线性关系;在预先确定的线性参数组和相机参数组的对应关系中存在该第一线性参数组时,从对应关系中查找出与第一线性参数组对应的第一相机参数组;第一相机参数组包括相机的架设高度、相机的俯仰角和相机的焦
精度校准方法、装置、电子设备及存储介质.pdf
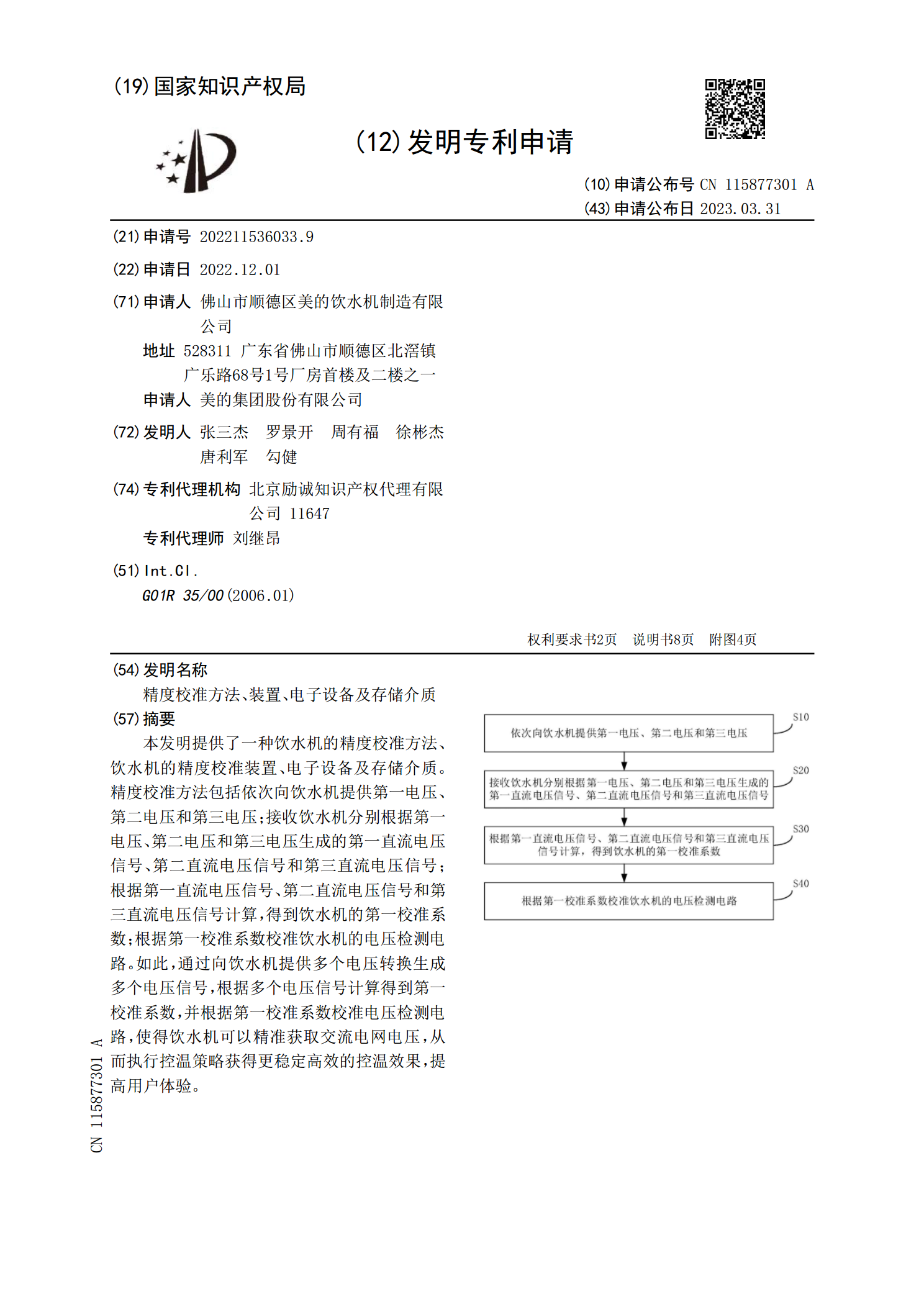
本发明提供了一种饮水机的精度校准方法、饮水机的精度校准装置、电子设备及存储介质。精度校准方法包括依次向饮水机提供第一电压、第二电压和第三电压;接收饮水机分别根据第一电压、第二电压和第三电压生成的第一直流电压信号、第二直流电压信号和第三直流电压信号;根据第一直流电压信号、第二直流电压信号和第三直流电压信号计算,得到饮水机的第一校准系数;根据第一校准系数校准饮水机的电压检测电路。如此,通过向饮水机提供多个电压转换生成多个电压信号,根据多个电压信号计算得到第一校准系数,并根据第一校准系数校准电压检测电路,使得饮
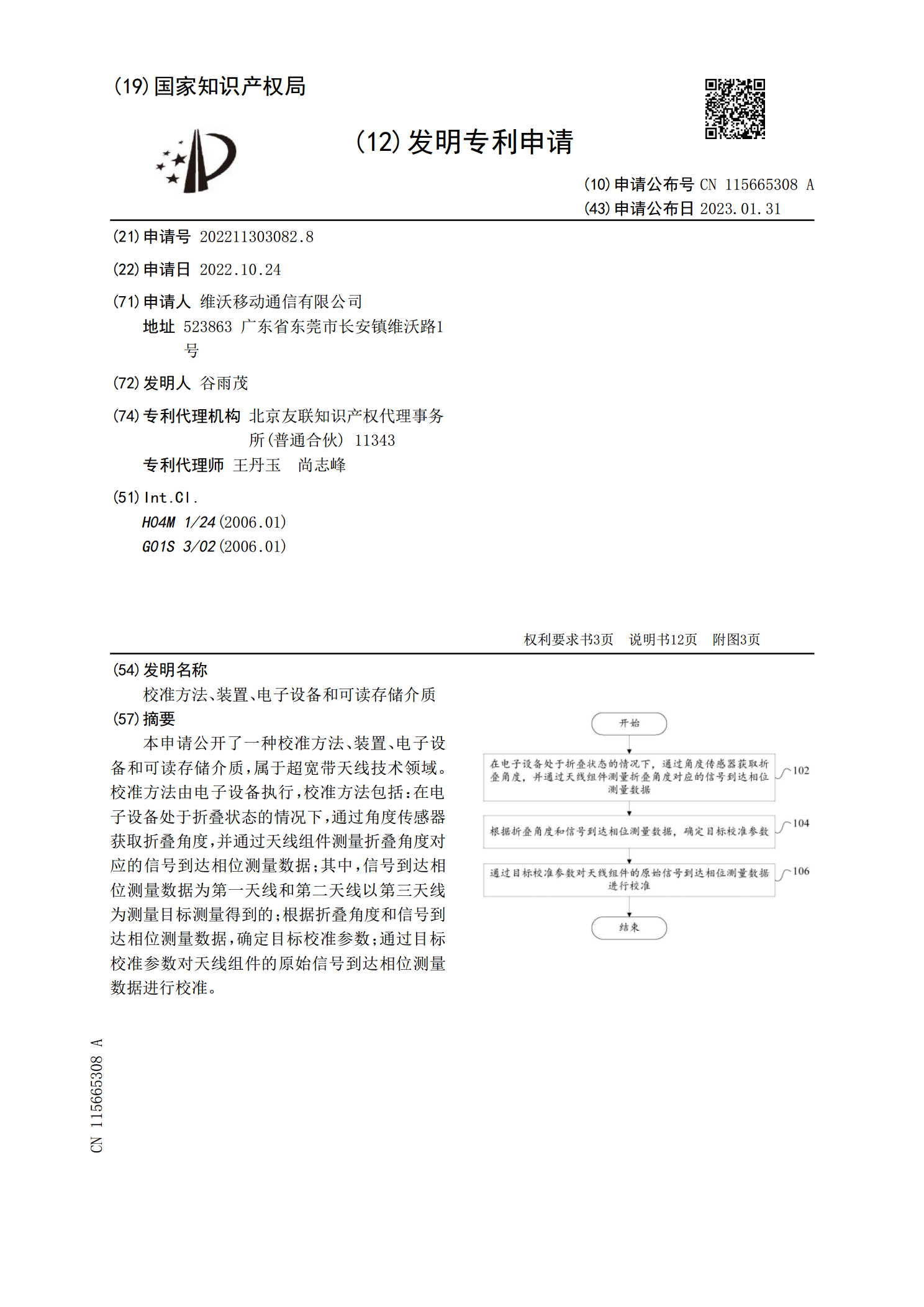
校准方法、装置、电子设备和可读存储介质.pdf
本申请公开了一种校准方法、装置、电子设备和可读存储介质,属于超宽带天线技术领域。校准方法由电子设备执行,校准方法包括:在电子设备处于折叠状态的情况下,通过角度传感器获取折叠角度,并通过天线组件测量折叠角度对应的信号到达相位测量数据;其中,信号到达相位测量数据为第一天线和第二天线以第三天线为测量目标测量得到的;根据折叠角度和信号到达相位测量数据,确定目标校准参数;通过目标校准参数对天线组件的原始信号到达相位测量数据进行校准。