
一种车路协同自适应巡航控制方法及装置.pdf

睿达****的的

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车路协同自适应巡航控制方法及装置.pdf
本发明提供一种车路协同自适应巡航控制方法,用于在道路行驶过程中通过C‑V2X技术对远车实时监测的主车上,所述方法包括以下步骤:主车周期性接收行驶道路周边预设路侧单元发送的V2I信息以及远车发送的V2V信息,并根据所接收的V2I信息和V2V信息,对主车与远车之间的碰撞风险进行检测;若检测到主车与远车不存在碰撞风险时,且在根据主车驾驶员的驾驶专注情况判定主车驾驶员为规范驾驶后,开启主车自适应巡航系统。实施本发明,基于C‑V2X技术对任何道路进行目标车辆实时监测来降低碰撞风险,还能提高驾驶安全性和乘坐舒适性。
一种自适应巡航控制方法及装置.pdf
本申请实施例提供一种自适应巡航控制方法及装置,涉及辅助驾驶技术领域。本申请所提供技术方案用于车辆在自适应巡航控制中选择切换跟车目标的时机。该方法包括:获取第一车辆的驾驶信息,基于驾驶信息确定第一车辆的驾驶风格,基于驾驶风格确定第一阈值;获取第二车辆的行驶信息,第二车辆位于第一车辆前方,第二车辆的行驶信息用于指示第二车辆占据第一车辆所在第一车道的程度;基于第二车辆占据第一车道的程度和第一阈值确定是否切换第一车辆的跟车目标。该方法应用于自适应巡航控制。
协同式自适应巡航控制车辆的微观模拟方法.pdf
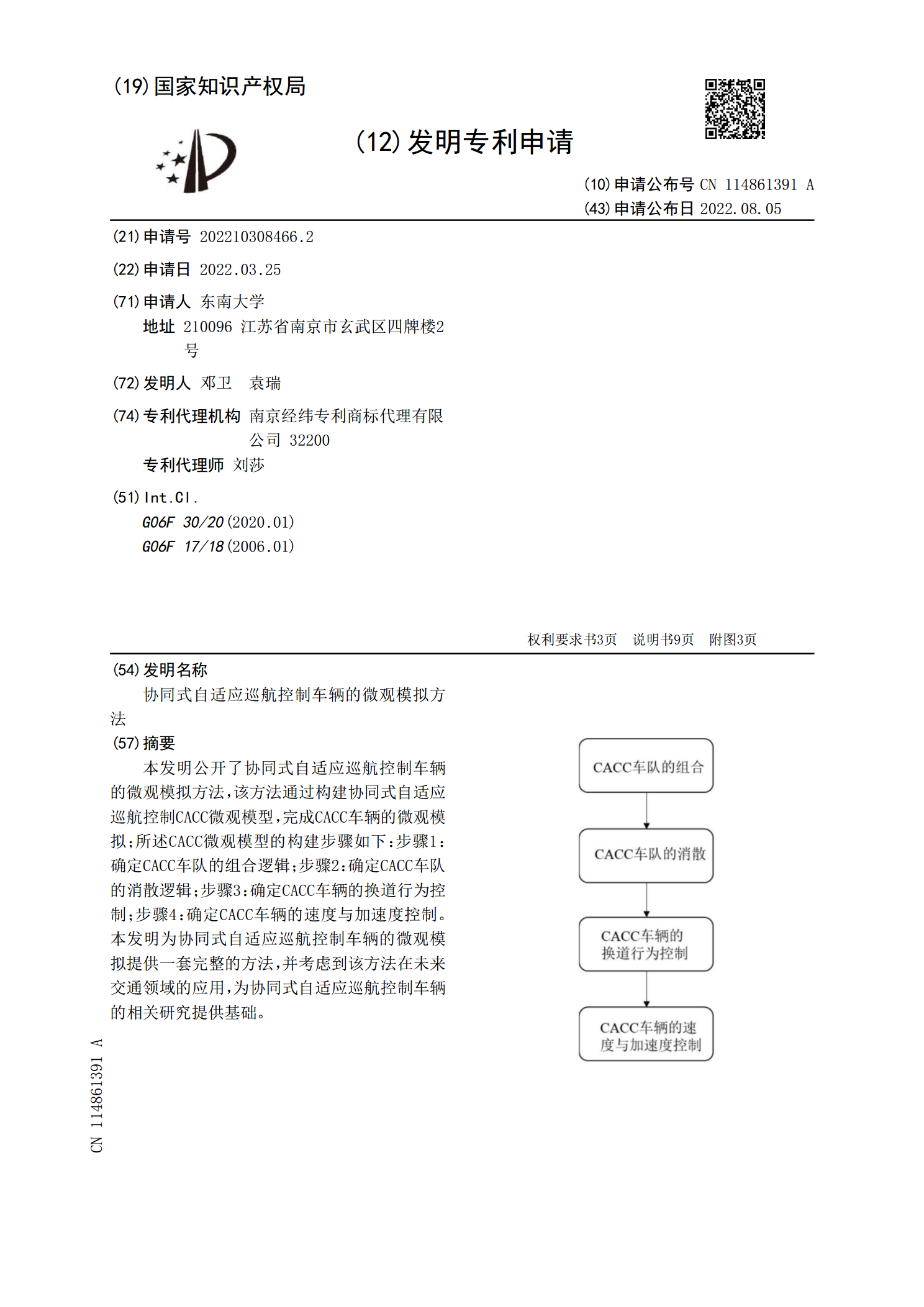
本发明公开了协同式自适应巡航控制车辆的微观模拟方法,该方法通过构建协同式自适应巡航控制CACC微观模型,完成CACC车辆的微观模拟;所述CACC微观模型的构建步骤如下:步骤1:确定CACC车队的组合逻辑;步骤2:确定CACC车队的消散逻辑;步骤3:确定CACC车辆的换道行为控制;步骤4:确定CACC车辆的速度与加速度控制。本发明为协同式自适应巡航控制车辆的微观模拟提供一套完整的方法,并考虑到该方法在未来交通领域的应用,为协同式自适应巡航控制车辆的相关研究提供基础。
一种多目标协同式自适应巡航装置及其控制系统.pdf
本发明公开了一种多目标协同式自适应巡航装置及其控制系统,属于自适应巡航系统领域,一种多目标协同式自适应巡航装置及其控制系统,当发生紧急情况时,一方面巡航控制系统控制对气撑囊进行充气,使隐性顶杆受到挤压支撑力,从而对司机放置在触觉提醒片上的脚部起到挤压抵触的作用,实现对司机从触觉上的提醒,另一方面巡航控制系统控制视觉提醒光球转动,在离心力作用下,多个自碰撞光球在视觉提醒光球内与视觉提醒光球不断发生碰撞,导致外透光壳撞击视觉提醒光球内壁并变色,在视觉上形成多道彩色光圈,进而实现在视觉上对司机进行提醒的效果,配
自适应巡航控制方法、装置和车辆.pdf
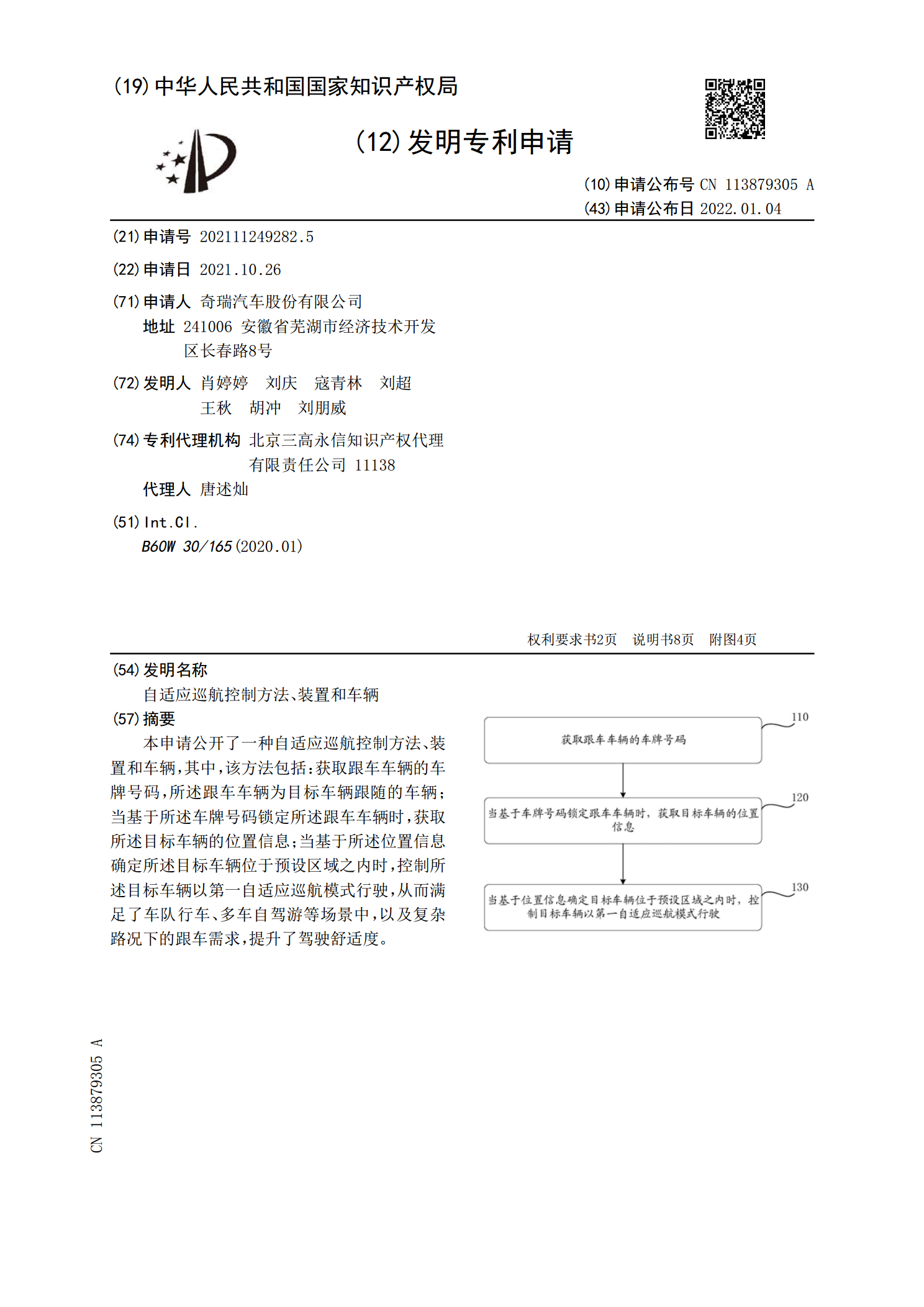
本申请公开了一种自适应巡航控制方法、装置和车辆,其中,该方法包括:获取跟车车辆的车牌号码,所述跟车车辆为目标车辆跟随的车辆;当基于所述车牌号码锁定所述跟车车辆时,获取所述目标车辆的位置信息;当基于所述位置信息确定所述目标车辆位于预设区域之内时,控制所述目标车辆以第一自适应巡航模式行驶,从而满足了车队行车、多车自驾游等场景中,以及复杂路况下的跟车需求,提升了驾驶舒适度。