
一种基于激光定位的塔脚节点姿态确定方法及系统.pdf

一条****淑淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于激光定位的塔脚节点姿态确定方法及系统.pdf
一种基于激光定位的塔脚节点姿态确定方法及系统,包括:在节点板上的有限个不共面定位圆环处安装靶标;用激光扫描设备采集节点板表面点云信息并从点云信息中识别靶标信息;基于靶标信息确定形心位置作为源点云;将塔脚数字模型中对应形心位置信息作为目标点云并结合源点云利用点云配准算法计算位置转换矩阵作为塔脚节点姿态矩阵;其中,所述塔脚数字模型是通过软件生成的塔脚节点精细化三维模型,所述塔脚数字模型中定位圆环的位置与节点板上定位圆环位置相同。本发明通过采用输电塔塔脚节点上若干个关键点的位置信息,利用点云配准计算节点空间姿态

一种基于激光定位的系统与方法.pdf
本发明公开了一种基于激光定位的系统,该系统的激光发射组件包括光源发生器、震动镜、处理器a以及射频收发器a,该震动镜连接有旋转底座,该系统的激光接收组件包括光传感器、处理器b以及射频收发器b;本发明还提供了一种基于激光定位的方法,该方法包括启动光源发生器产生激光信号,并通过震动镜反射;震动镜通过旋转底座的带动使激光连续在一个区域内进行扫描;处理器b捕捉光传感器信号变化,并控制射频收发器b发射信号至射频收发器a;射频收发器a接收到信号后通过处理器a通过扫描收敛算法预估该光传感器所在的大致区域,并在该新的区域内
一种基于船体姿态监测的定位方法及系统.pdf
本发明公开了一种基于船体姿态监测的定位方法及系统,包括,采集船体姿态监测数据进行预处理,划分数据集,设定输入向量;基于时间序列策略构建定位模型,对输入向量进行参数确认;结合LS‑VSM和数据集对定位模型进行定位预测训练;设定定位训练阈值,若满足,则输出训练完成的定位模型,输入测试集进行测试,得到定位预测值。本发明通过定位模型,结合RTK实时差分定位,实现厘米级船体定位,且对船体姿态进行实时监测,实时船体姿态播报,地面站各数据实时收发,查看和存储,各船只使用的数据信息保存云端,可调用查看与分析,支持物联网(
一种竖井掘进机姿态确定系统及姿态确定方法.pdf
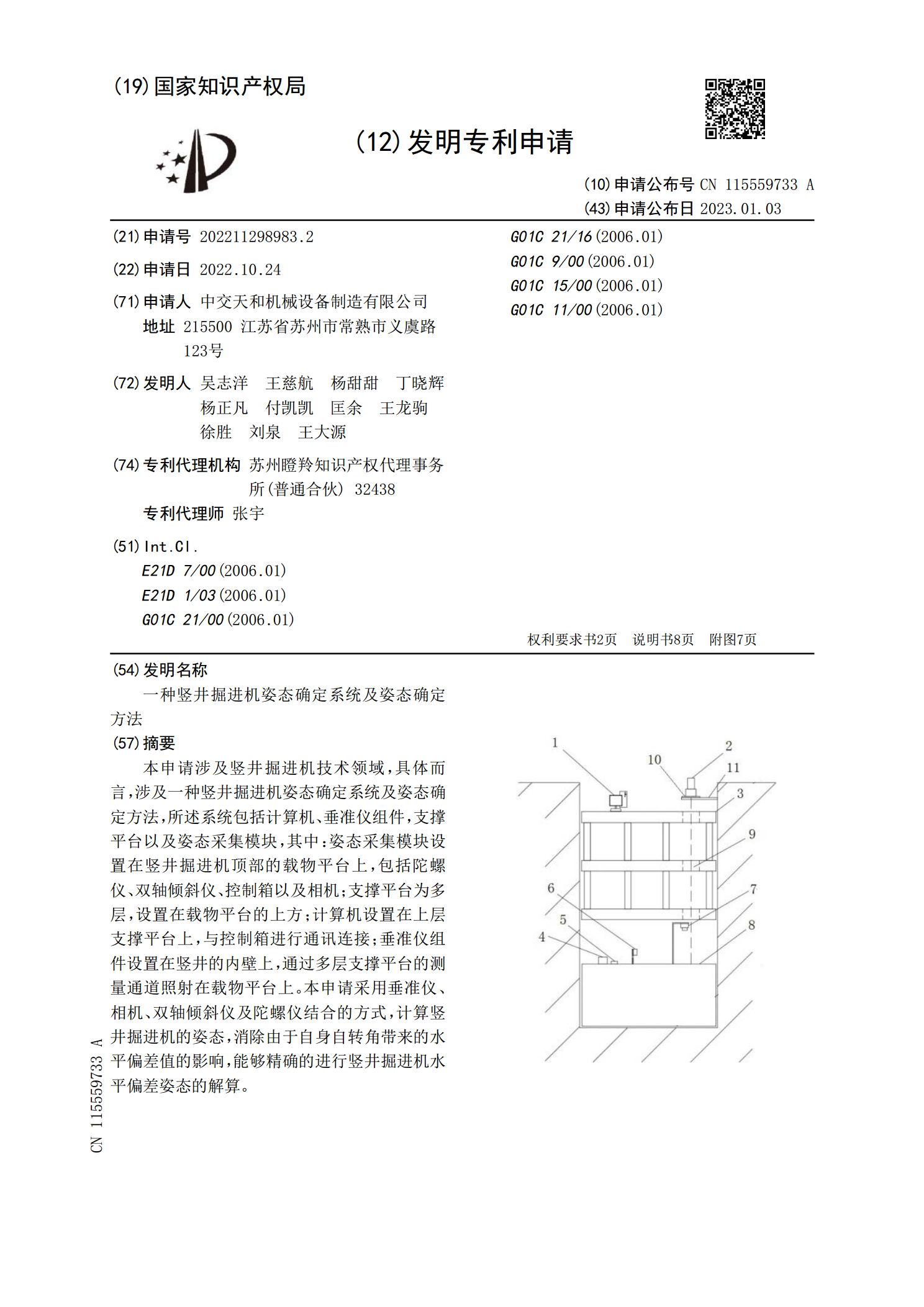
本申请涉及竖井掘进机技术领域,具体而言,涉及一种竖井掘进机姿态确定系统及姿态确定方法,所述系统包括计算机、垂准仪组件,支撑平台以及姿态采集模块,其中:姿态采集模块设置在竖井掘进机顶部的载物平台上,包括陀螺仪、双轴倾斜仪、控制箱以及相机;支撑平台为多层,设置在载物平台的上方;计算机设置在上层支撑平台上,与控制箱进行通讯连接;垂准仪组件设置在竖井的内壁上,通过多层支撑平台的测量通道照射在载物平台上。本申请采用垂准仪、相机、双轴倾斜仪及陀螺仪结合的方式,计算竖井掘进机的姿态,消除由于自身自转角带来的水平偏差值的

基于挖掘机GNSS精确定位的开采姿态监测系统.docx
基于挖掘机GNSS精确定位的开采姿态监测系统基于挖掘机GNSS精确定位的开采姿态监测系统摘要:随着挖掘机在开采工程中的广泛应用,挖掘机的安全性和效率成为了重要的课题。本文提出了一种基于挖掘机GNSS精确定位的开采姿态监测系统,该系统通过利用全球导航卫星系统(GNSS)实现挖掘机的精确定位,进而利用惯性测量单元(IMU)监测挖掘机的开采姿态,以提高挖掘机的安全性和效率。实验结果表明,该系统能够实现实时监测挖掘机的开采姿态信息,并在姿态异常时进行报警,具有较高的精确性和可靠性。关键词:挖掘机;GNSS;精确定