
一种竖井掘进机姿态确定系统及姿态确定方法.pdf

佳宁****么啦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种竖井掘进机姿态确定系统及姿态确定方法.pdf
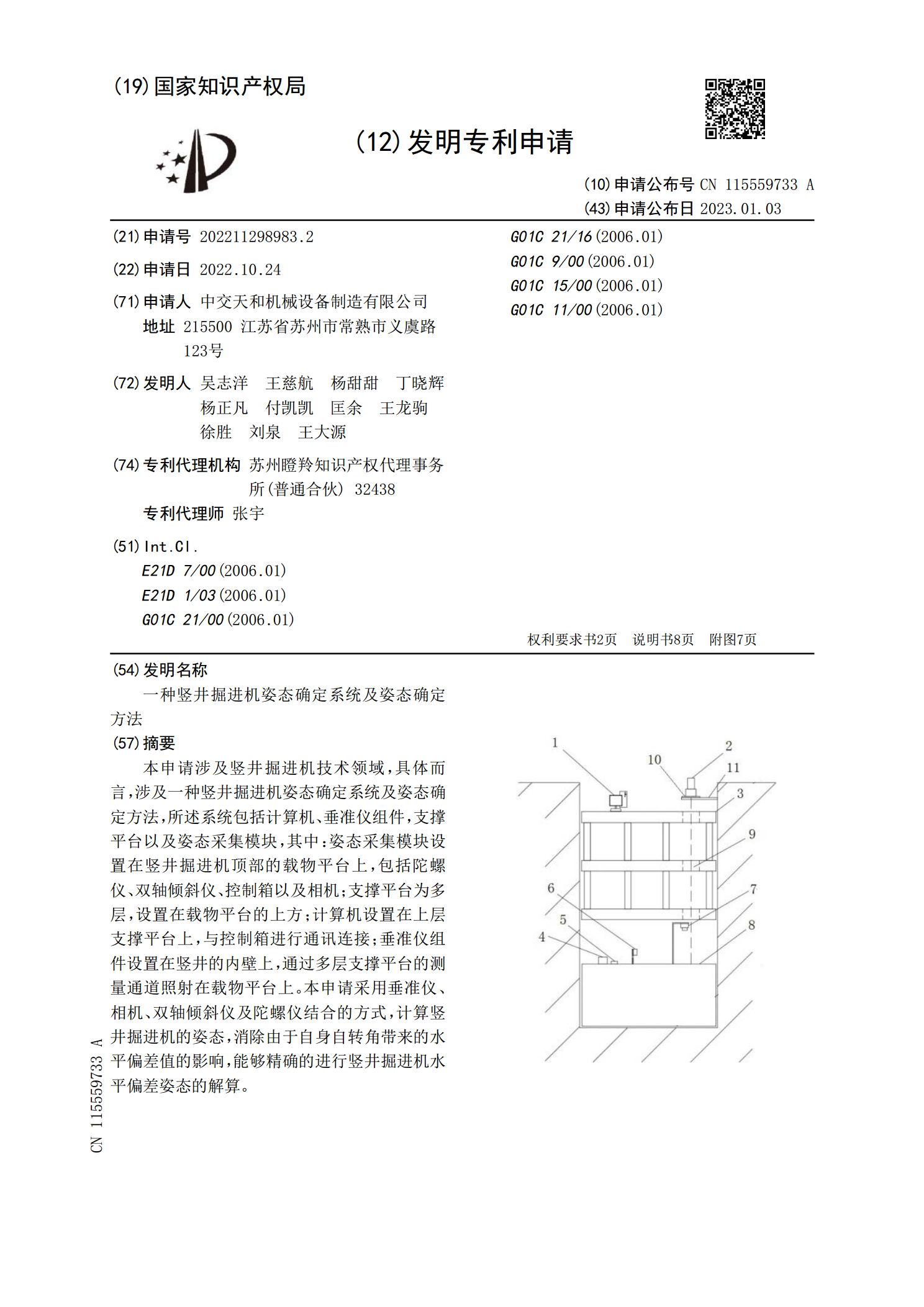
本申请涉及竖井掘进机技术领域,具体而言,涉及一种竖井掘进机姿态确定系统及姿态确定方法,所述系统包括计算机、垂准仪组件,支撑平台以及姿态采集模块,其中:姿态采集模块设置在竖井掘进机顶部的载物平台上,包括陀螺仪、双轴倾斜仪、控制箱以及相机;支撑平台为多层,设置在载物平台的上方;计算机设置在上层支撑平台上,与控制箱进行通讯连接;垂准仪组件设置在竖井的内壁上,通过多层支撑平台的测量通道照射在载物平台上。本申请采用垂准仪、相机、双轴倾斜仪及陀螺仪结合的方式,计算竖井掘进机的姿态,消除由于自身自转角带来的水平偏差值的

确定自主铲运机姿态的方法.docx
确定自主铲运机姿态的方法自主铲运机在工业生产中广泛应用,然而它完成任务的效率与准确性大多受限于其姿态的控制。因此,确定自主铲运机姿态的方法成为了一项重要的研究课题。本论文将介绍目前常用的三种姿态控制方法:惯性测量单元(IMU)姿态估计、视觉姿态估计和混合姿态估计方法,并比较它们的优缺点和适应场景,以期为该领域的研究提供参考。1.惯性测量单元姿态估计IMU是一类基于加速度计和陀螺仪等惯性传感器的姿态测量装置。加速度计可以测量自主铲运机受到的加速度,而陀螺仪则可以测量自主铲运机的角速度。因此,IMU通过测量这

一种基于激光定位的塔脚节点姿态确定方法及系统.pdf
一种基于激光定位的塔脚节点姿态确定方法及系统,包括:在节点板上的有限个不共面定位圆环处安装靶标;用激光扫描设备采集节点板表面点云信息并从点云信息中识别靶标信息;基于靶标信息确定形心位置作为源点云;将塔脚数字模型中对应形心位置信息作为目标点云并结合源点云利用点云配准算法计算位置转换矩阵作为塔脚节点姿态矩阵;其中,所述塔脚数字模型是通过软件生成的塔脚节点精细化三维模型,所述塔脚数字模型中定位圆环的位置与节点板上定位圆环位置相同。本发明通过采用输电塔塔脚节点上若干个关键点的位置信息,利用点云配准计算节点空间姿态

人脸姿态的确定.doc
人脸姿态的确定计算机科学与技术03级2班梁悦敏张地讲师(韶关学院信息工程学院,广东韶关512005)摘要:对于给定一张人脸,通过测量人脸上特征点的几何参数,来计算该人脸在垂直于成像平面的仰(俯)角和平行于成像平面的转角,并对影响人脸姿态确定的各种因素进行分析。本文采用人手选取三个特征点,包括左外眼角、右外眼角、鼻尖等特征点来构建一个特征三角形来确定人脸姿态。具体做法是,首先确定正面人脸三个特征点,计算两眼角的距离和鼻尖到两外眼角连线的垂直距离等参数。然后根据这些正面人脸参数与待确定姿态的人脸参数的关系来确

一种确定自旋卫星姿态的新方法.docx
一种确定自旋卫星姿态的新方法引言自旋卫星作为国家重要的测量、导航和通信平台,其姿态控制是卫星任务正常运行的重要环节之一。传统的卫星姿态控制方法主要是基于控制律和观测器设计。其中,观测器设计中最关键的是如何获取卫星的姿态信息。在传统的方法中,常用的姿态测量传感器如星敏感器、陀螺仪、磁强计等精度较高,但其重量和体积较大,费用较高,不适合小型卫星选用。本文将探讨一种基于辅助星观测器的自旋卫星姿态确定方法,该方法可用于小型自旋卫星,并且比传统方法更经济、更实用。主要包括卫星姿态控制方法、辅助星观测器原理、姿态解算