
一种基于船体姿态监测的定位方法及系统.pdf

含秀****66

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于船体姿态监测的定位方法及系统.pdf
本发明公开了一种基于船体姿态监测的定位方法及系统,包括,采集船体姿态监测数据进行预处理,划分数据集,设定输入向量;基于时间序列策略构建定位模型,对输入向量进行参数确认;结合LS‑VSM和数据集对定位模型进行定位预测训练;设定定位训练阈值,若满足,则输出训练完成的定位模型,输入测试集进行测试,得到定位预测值。本发明通过定位模型,结合RTK实时差分定位,实现厘米级船体定位,且对船体姿态进行实时监测,实时船体姿态播报,地面站各数据实时收发,查看和存储,各船只使用的数据信息保存云端,可调用查看与分析,支持物联网(
一种基于桥梁转体姿态实时监测的桥梁转体方法及系统.pdf
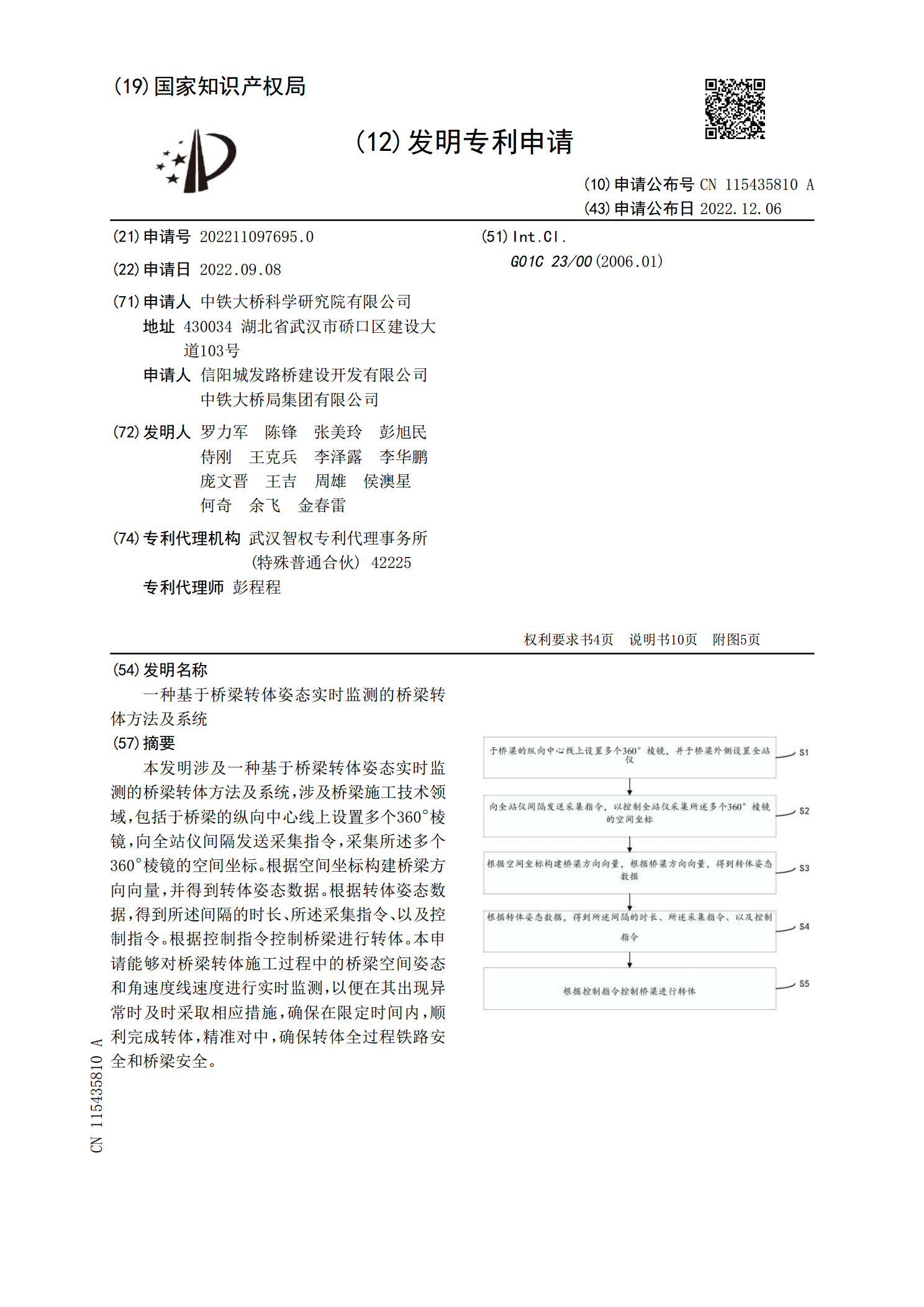
本发明涉及一种基于桥梁转体姿态实时监测的桥梁转体方法及系统,涉及桥梁施工技术领域,包括于桥梁的纵向中心线上设置多个360°棱镜,向全站仪间隔发送采集指令,采集所述多个360°棱镜的空间坐标。根据空间坐标构建桥梁方向向量,并得到转体姿态数据。根据转体姿态数据,得到所述间隔的时长、所述采集指令、以及控制指令。根据控制指令控制桥梁进行转体。本申请能够对桥梁转体施工过程中的桥梁空间姿态和角速度线速度进行实时监测,以便在其出现异常时及时采取相应措施,确保在限定时间内,顺利完成转体,精准对中,确保转体全过程铁路安全和

一种基于姿态的考生位置定位方法.pdf
本发明公开了一种基于姿态的考生位置定位方法,包括如下步骤:S1:通过OpenPose模型提取监考视频中所有人的鼻子点、脖子点和双肩关节点的位置信息以及对应的置信度,用滑动窗口去掉分布稀疏的脖子点并对留下的脖子点数据进行增强,给每个增强数据一个权值,并根据鼻子和双肩关节点的置信度计算得到每个点的权值;S2:寻找连通区域;S3:聚合连通区域;S4:划分连通区域;S5:确定每个人的位置。该基于姿态的考生位置定位方法,定位方便快捷且运算简单,只利用姿态数据即可定位视频中多个人的位置而不需要使用额外的设备。

基于强度监测系统的船体结构疲劳评估方法研究.docx
基于强度监测系统的船体结构疲劳评估方法研究基于强度监测系统的船体结构疲劳评估方法研究摘要:随着船舶行业的快速发展,船舶结构的疲劳问题日益受到关注。船体结构疲劳评估是船舶结构设计和维护的重要环节,也是保证船舶安全性和可靠性的关键之一。本文以强度监测系统为基础,以研究船体结构疲劳评估方法为主题,综合利用数学模型、实验分析和数值模拟等方法,探讨了船体结构疲劳评估的新方法和新技术,为船舶行业提供了技术支持和科学依据。1.引言船舶结构的疲劳问题是一个长期存在且不容忽视的问题。结构疲劳引起的船舶事故频发,造成了严重的

基于挖掘机GNSS精确定位的开采姿态监测系统.docx
基于挖掘机GNSS精确定位的开采姿态监测系统基于挖掘机GNSS精确定位的开采姿态监测系统摘要:随着挖掘机在开采工程中的广泛应用,挖掘机的安全性和效率成为了重要的课题。本文提出了一种基于挖掘机GNSS精确定位的开采姿态监测系统,该系统通过利用全球导航卫星系统(GNSS)实现挖掘机的精确定位,进而利用惯性测量单元(IMU)监测挖掘机的开采姿态,以提高挖掘机的安全性和效率。实验结果表明,该系统能够实现实时监测挖掘机的开采姿态信息,并在姿态异常时进行报警,具有较高的精确性和可靠性。关键词:挖掘机;GNSS;精确定