
基于挖掘机GNSS精确定位的开采姿态监测系统.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于挖掘机GNSS精确定位的开采姿态监测系统.docx
基于挖掘机GNSS精确定位的开采姿态监测系统基于挖掘机GNSS精确定位的开采姿态监测系统摘要:随着挖掘机在开采工程中的广泛应用,挖掘机的安全性和效率成为了重要的课题。本文提出了一种基于挖掘机GNSS精确定位的开采姿态监测系统,该系统通过利用全球导航卫星系统(GNSS)实现挖掘机的精确定位,进而利用惯性测量单元(IMU)监测挖掘机的开采姿态,以提高挖掘机的安全性和效率。实验结果表明,该系统能够实现实时监测挖掘机的开采姿态信息,并在姿态异常时进行报警,具有较高的精确性和可靠性。关键词:挖掘机;GNSS;精确定

基于GNSS差分定位的天气雷达坐标精确定位研究.docx
基于GNSS差分定位的天气雷达坐标精确定位研究一、引言天气雷达是现代气象预报中最为重要的观测仪器,能够提供高时间和空间分辨率的气象参数信息,广泛应用于短期预报、异常天气监测和气候研究等领域。然而,天气雷达坐标的准确性对于天气预报的准确性具有至关重要的影响。传统的天气雷达坐标定位方法多依赖于地形、城市等基础数据,但由于这些数据的准确性、完整性和时效性常常存在问题,因此需要使用更加可靠的雷达坐标精确定位方法。全球卫星导航系统(GNSS)是一种高精度、高可靠性的定位系统,通过接收全球卫星信号来确定接收机的位置,

基于GNSS和地面基站的组合式导航精确测速定位方法及系统.pdf
本发明公开了基于GNSS和地面基站的组合式导航精确测速定位方法及系统,步骤100、获取车辆进入盲区前的初始位置,步骤200、获得车辆坐标和航向角,在车辆驶入GNSS盲区后的第一个采样时刻,利用多重权值地图匹配算法计算得到车辆在盲区中的坐标和航向角,步骤300、获得当前车辆的速度和横摆角速度,步骤400、根据获得的车辆参数判断车辆是否在GNSS盲区中,步骤500、获取下一时刻车辆位置坐标以及航向角,本发明改进了现有的GNSS点方位角匹配算法,使用前后定位点连线与路段夹角、定位点与路段投影距离和航向角与路段夹
一种基于船体姿态监测的定位方法及系统.pdf
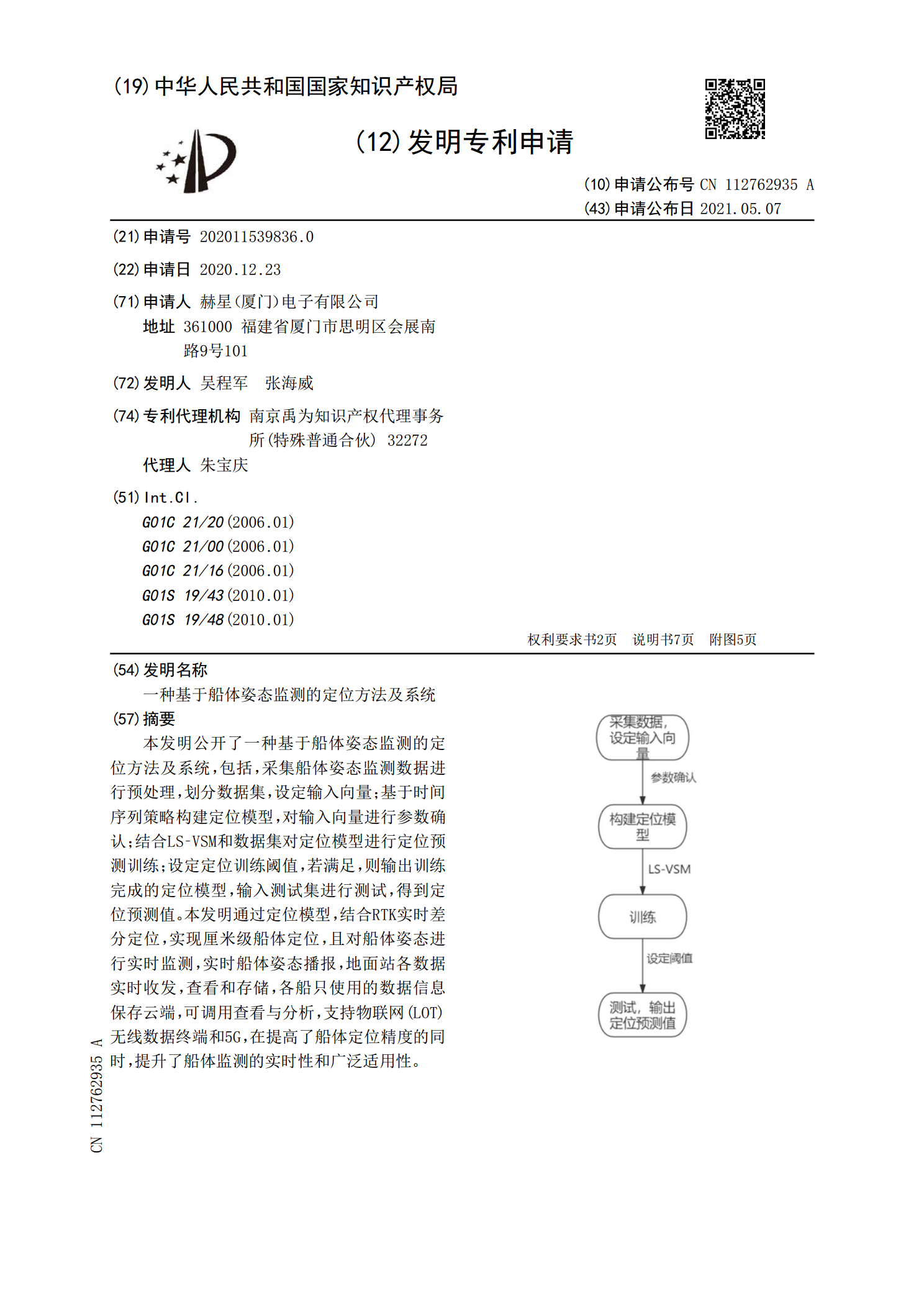
本发明公开了一种基于船体姿态监测的定位方法及系统,包括,采集船体姿态监测数据进行预处理,划分数据集,设定输入向量;基于时间序列策略构建定位模型,对输入向量进行参数确认;结合LS‑VSM和数据集对定位模型进行定位预测训练;设定定位训练阈值,若满足,则输出训练完成的定位模型,输入测试集进行测试,得到定位预测值。本发明通过定位模型,结合RTK实时差分定位,实现厘米级船体定位,且对船体姿态进行实时监测,实时船体姿态播报,地面站各数据实时收发,查看和存储,各船只使用的数据信息保存云端,可调用查看与分析,支持物联网(

基于GNSS技术的矿区开采沉陷自动化监测系统应用与探讨.docx
基于GNSS技术的矿区开采沉陷自动化监测系统应用与探讨基于GNSS技术的矿区开采沉陷自动化监测系统应用与探讨摘要:随着矿区开采活动的加剧,地表沉陷成为一个关注的焦点。本论文提出了一种基于GNSS技术的矿区开采沉陷自动化监测系统,并对其应用和性能进行了探讨。该系统通过GNSS卫星定位技术实现对矿区开采导致的地面沉陷变形行为的实时监测和分析,可为矿山管理部门提供科学的决策依据。关键词:GNSS技术,矿区开采,沉陷,监测系统1引言近年来,矿区开采活动的规模和强度不断增加,由此引发的地面沉陷问题也日益凸显。传统的