
一种车辆的自适应巡航滑模控制方法.pdf

一吃****瀚文

1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆的自适应巡航滑模控制方法.pdf
本发明公开了一种车辆的自适应巡航滑模控制方法,包括以下步骤:根据主车与目标车数据构建坐标系;根据坐标系进行控制区域划分;设定滑模控制面的切换函数和趋近率;进行各个控制区域的参数设置;计算各控制区域的加减速度;优化区域划分并进行加减速度调整。上述技术方案采用滑模控制的自适应巡航兼顾了快速响应和鲁棒性的要求,并不依赖于非线性系统模型,设计的滑模运动坐标系,覆盖了时距控制的所有工况,坐标系的区域分区和不同分区的参数设置适配了不同区域的物理特性,Follow区域的设定和计算方式在一定程度上避免了滑模控制抖振现象,

基于滑模控制的车辆自适应巡航系统设计.docx
基于滑模控制的车辆自适应巡航系统设计摘要本论文主要针对车辆自适应巡航系统进行研究。提出了一种基于滑模控制的车辆自适应巡航系统设计方案,并对其进行了详细的分析与实验验证。试验结果表明,该方案在保证车辆安全性的前提下,具有良好的效果和鲁棒性。本研究成果可为车辆自适应巡航技术的进一步研究提供参考。关键词:车辆自适应巡航系统;滑模控制;安全性;效果;鲁棒性。1.引言车辆自适应巡航系统是现代汽车智能化技术的重要组成部分,它可以帮助驾驶员更加舒适和安全地驾驶车辆。然而,目前车辆自适应巡航系统还存在一些技术问题,如对车
自适应巡航控制方法、装置和车辆.pdf
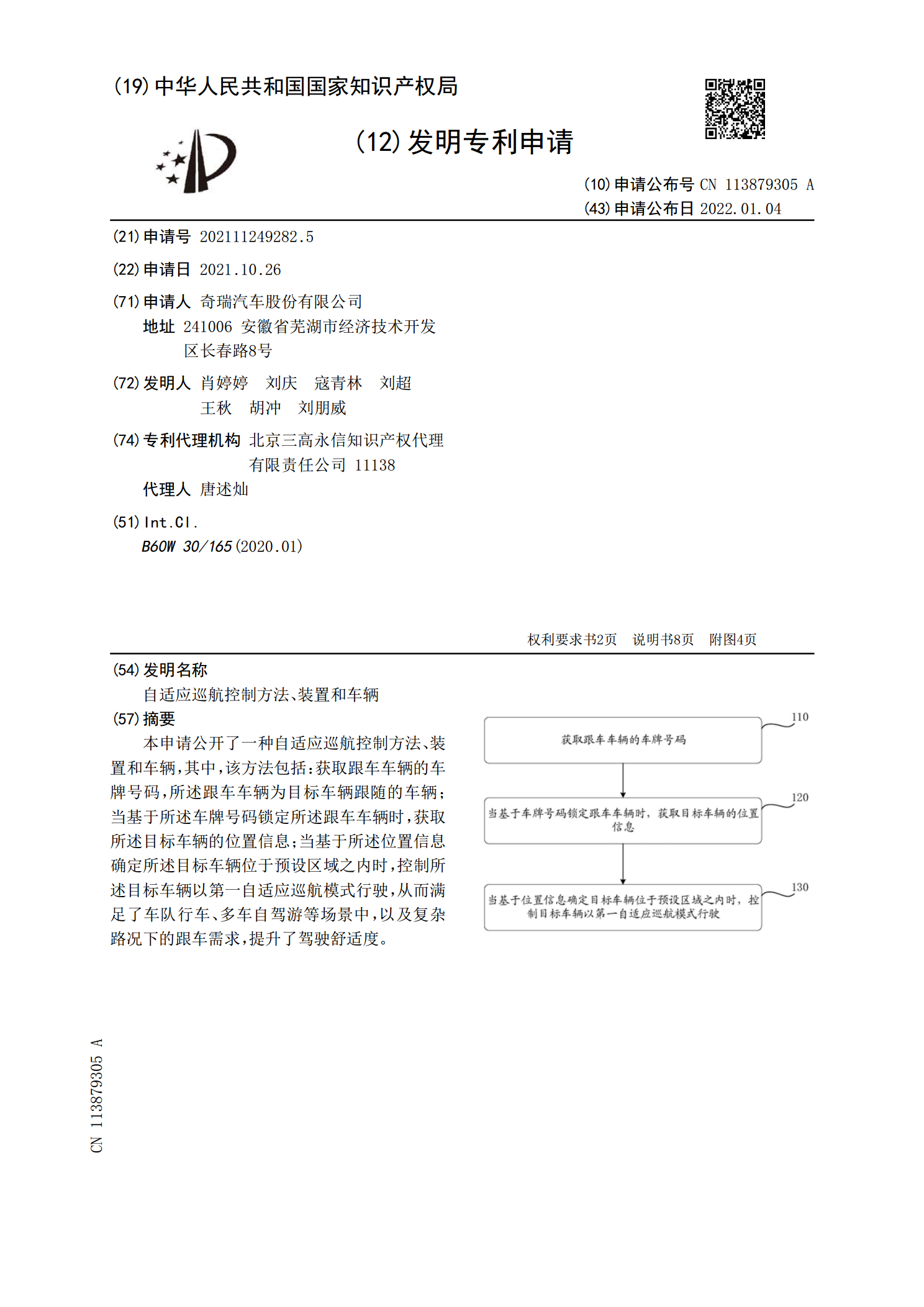
本申请公开了一种自适应巡航控制方法、装置和车辆,其中,该方法包括:获取跟车车辆的车牌号码,所述跟车车辆为目标车辆跟随的车辆;当基于所述车牌号码锁定所述跟车车辆时,获取所述目标车辆的位置信息;当基于所述位置信息确定所述目标车辆位于预设区域之内时,控制所述目标车辆以第一自适应巡航模式行驶,从而满足了车队行车、多车自驾游等场景中,以及复杂路况下的跟车需求,提升了驾驶舒适度。
自适应巡航控制系统、方法及车辆.pdf
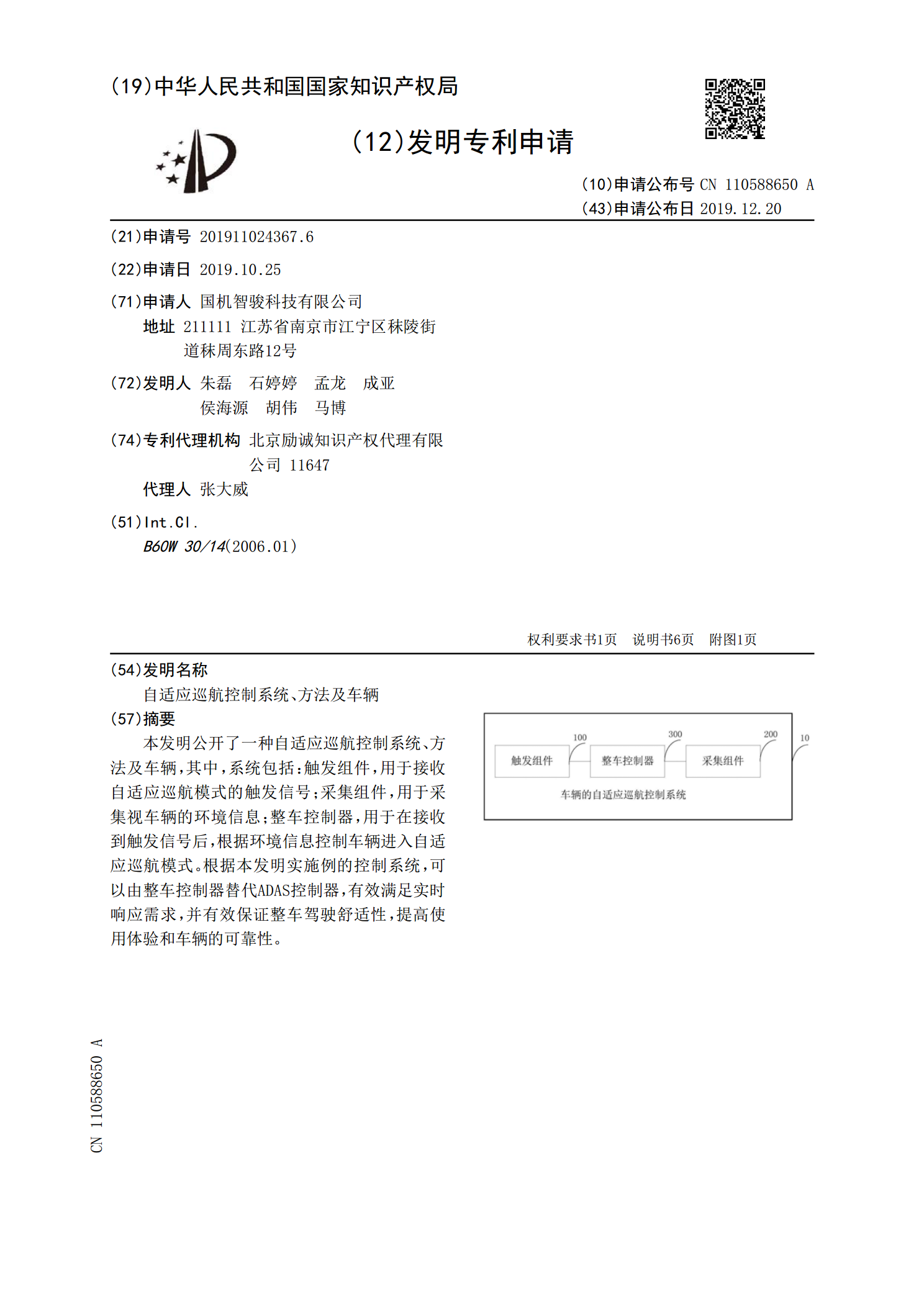
本发明公开了一种自适应巡航控制系统、方法及车辆,其中,系统包括:触发组件,用于接收自适应巡航模式的触发信号;采集组件,用于采集视车辆的环境信息;整车控制器,用于在接收到触发信号后,根据环境信息控制车辆进入自适应巡航模式。根据本发明实施例的控制系统,可以由整车控制器替代ADAS控制器,有效满足实时响应需求,并有效保证整车驾驶舒适性,提高使用体验和车辆的可靠性。
基于滑模控制的自动驾驶车辆间距自适应控制方法.pdf
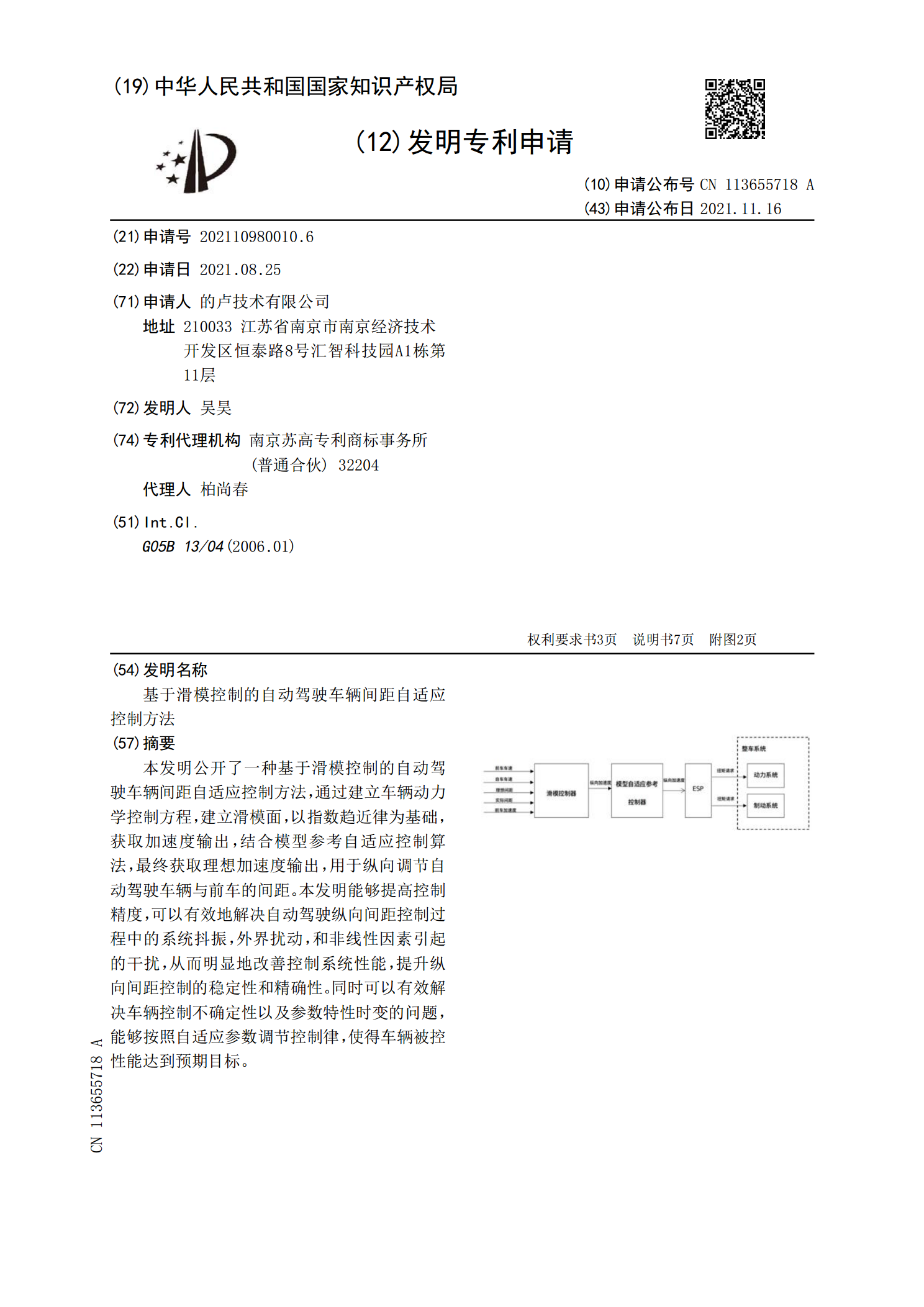
本发明公开了一种基于滑模控制的自动驾驶车辆间距自适应控制方法,通过建立车辆动力学控制方程,建立滑模面,以指数趋近律为基础,获取加速度输出,结合模型参考自适应控制算法,最终获取理想加速度输出,用于纵向调节自动驾驶车辆与前车的间距。本发明能够提高控制精度,可以有效地解决自动驾驶纵向间距控制过程中的系统抖振,外界扰动,和非线性因素引起的干扰,从而明显地改善控制系统性能,提升纵向间距控制的稳定性和精确性。同时可以有效解决车辆控制不确定性以及参数特性时变的问题,能够按照自适应参数调节控制律,使得车辆被控性能达到预期