
基于滑模控制的自动驾驶车辆间距自适应控制方法.pdf

一只****ng

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于滑模控制的自动驾驶车辆间距自适应控制方法.pdf
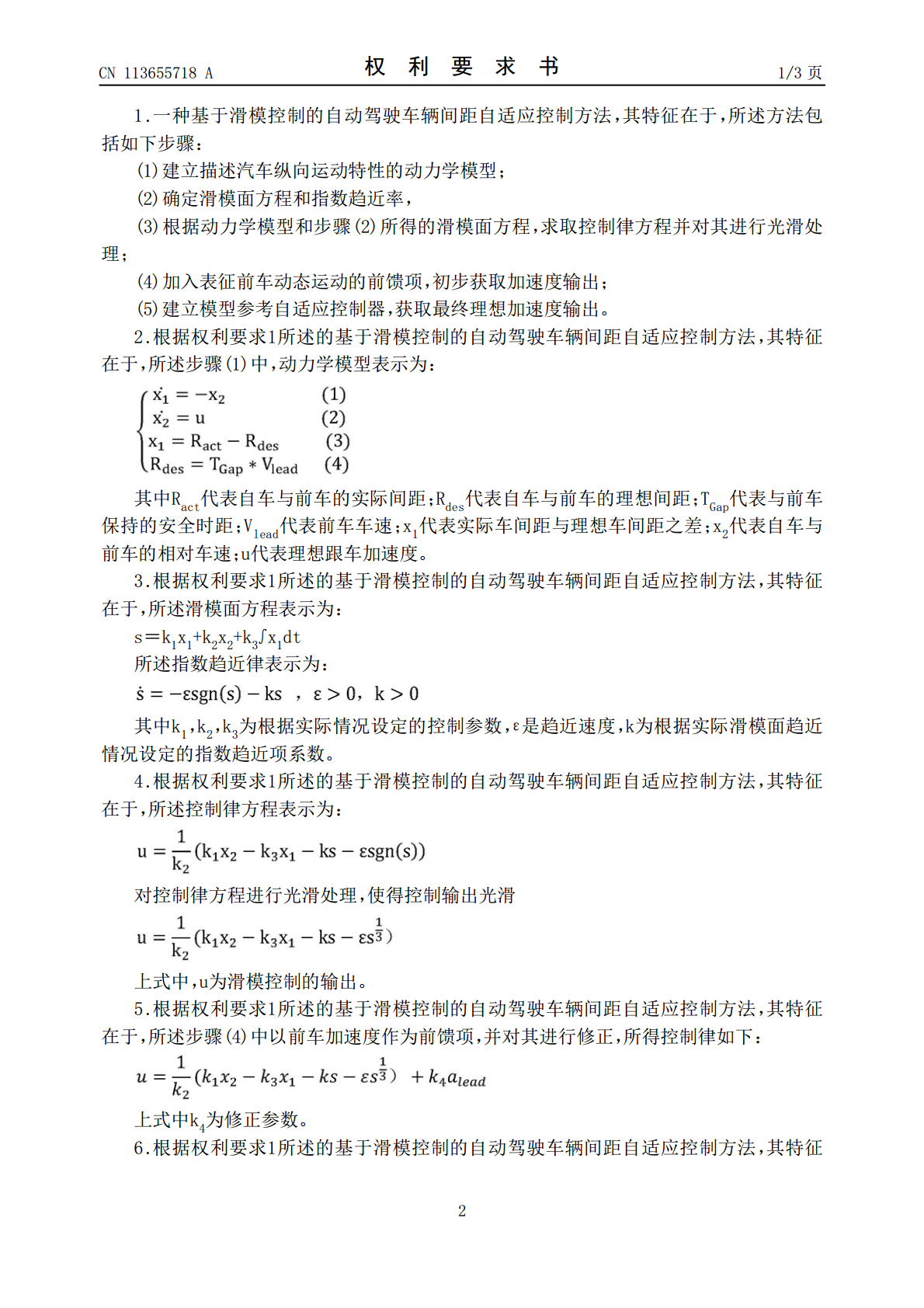
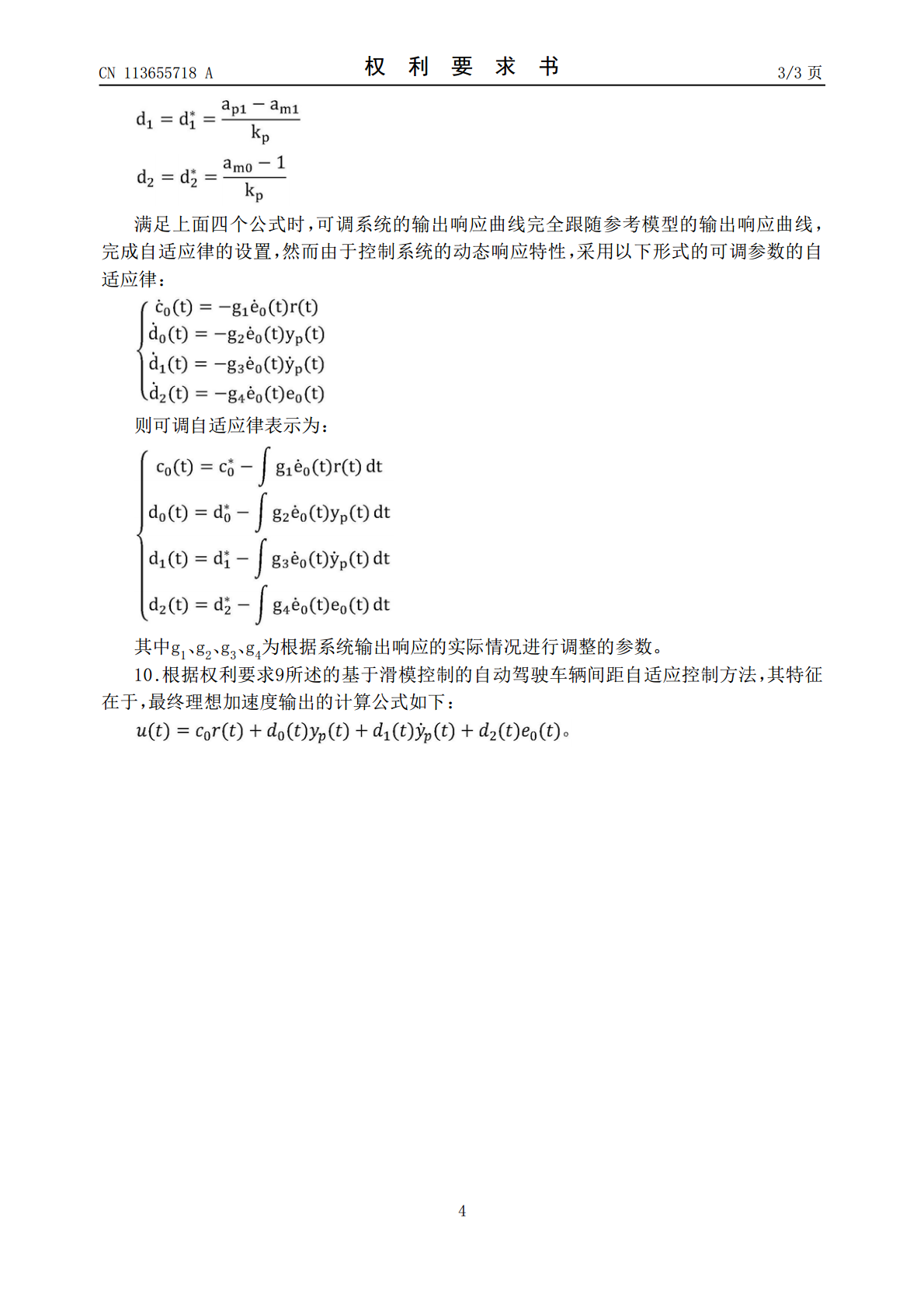
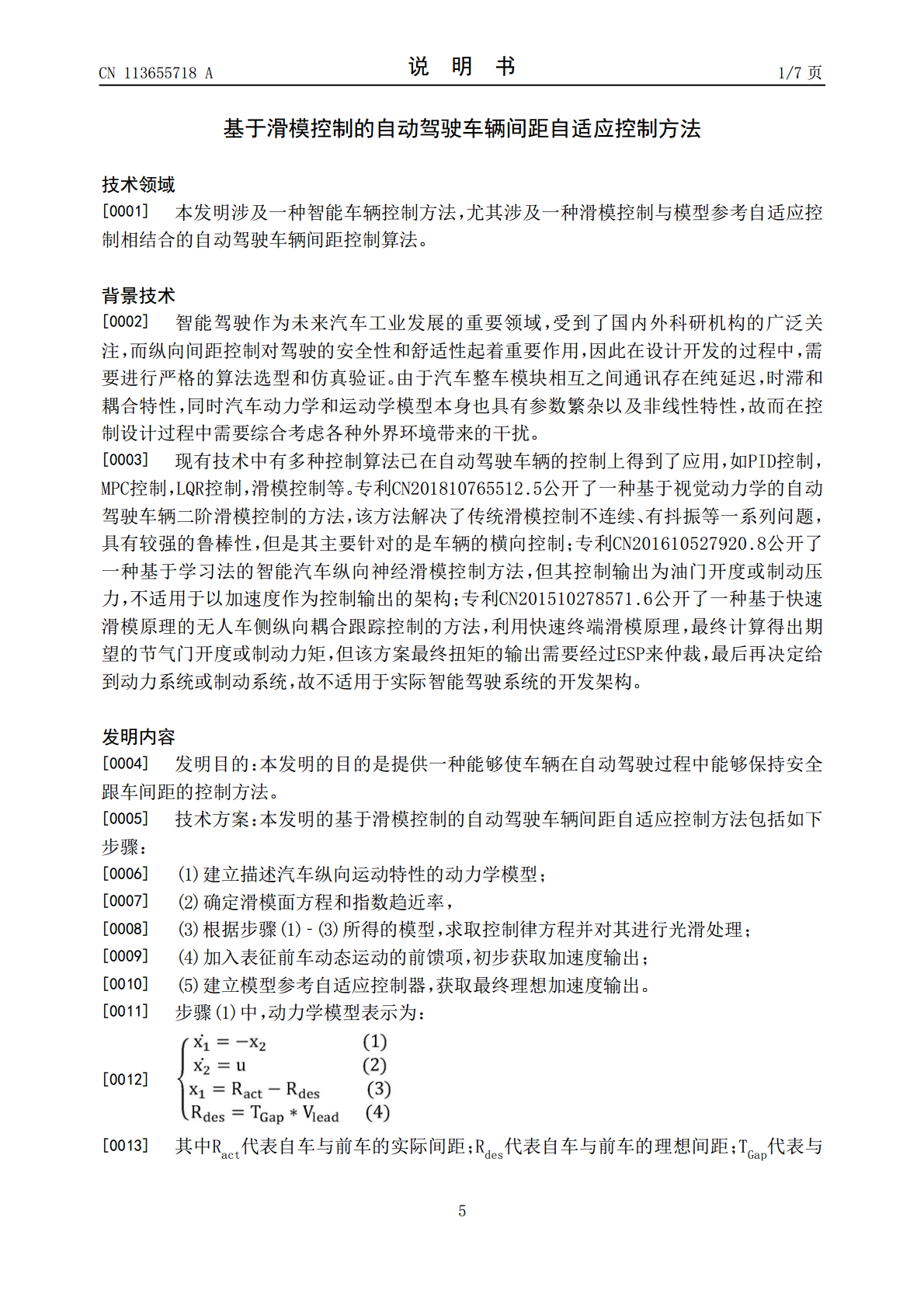
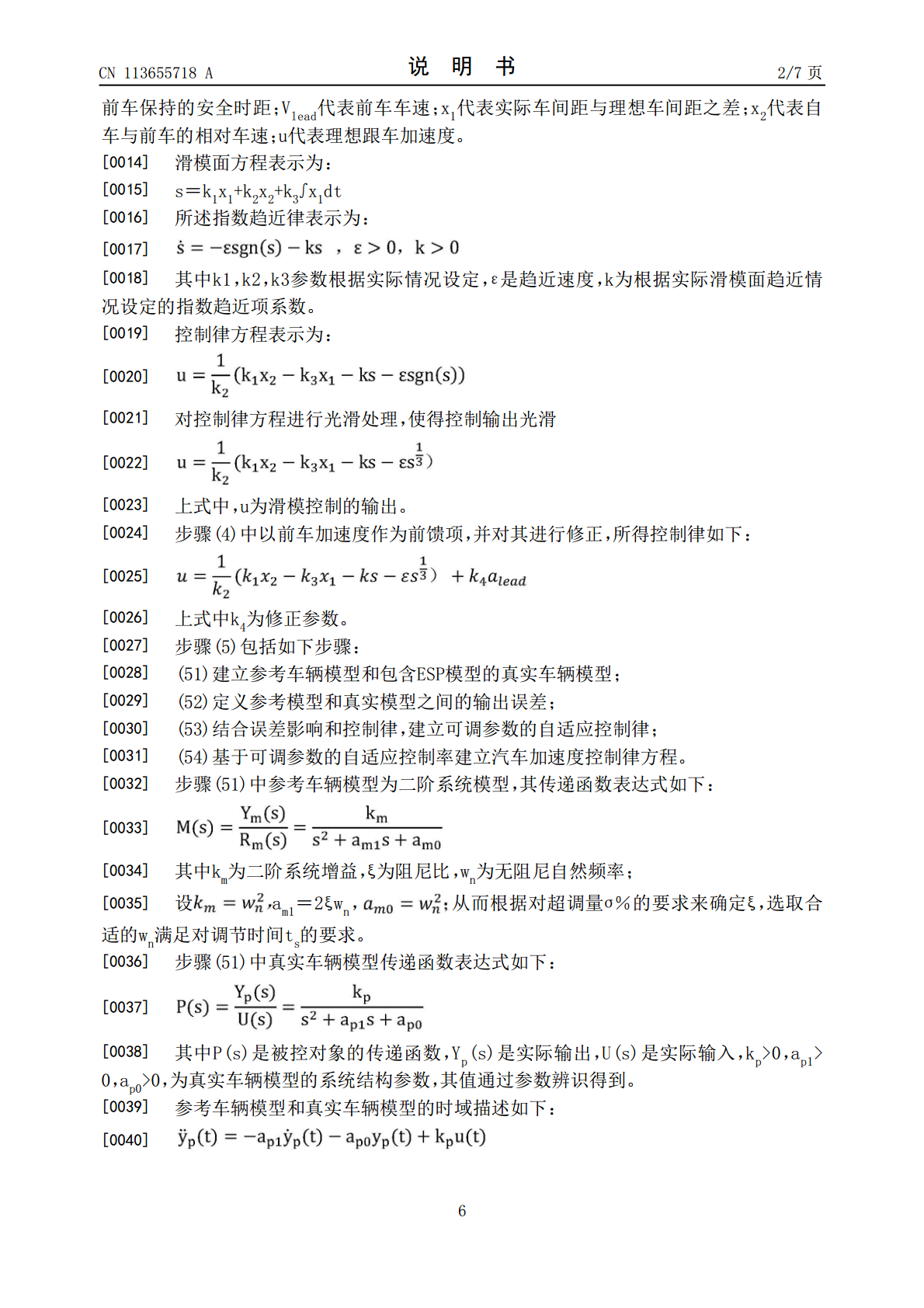
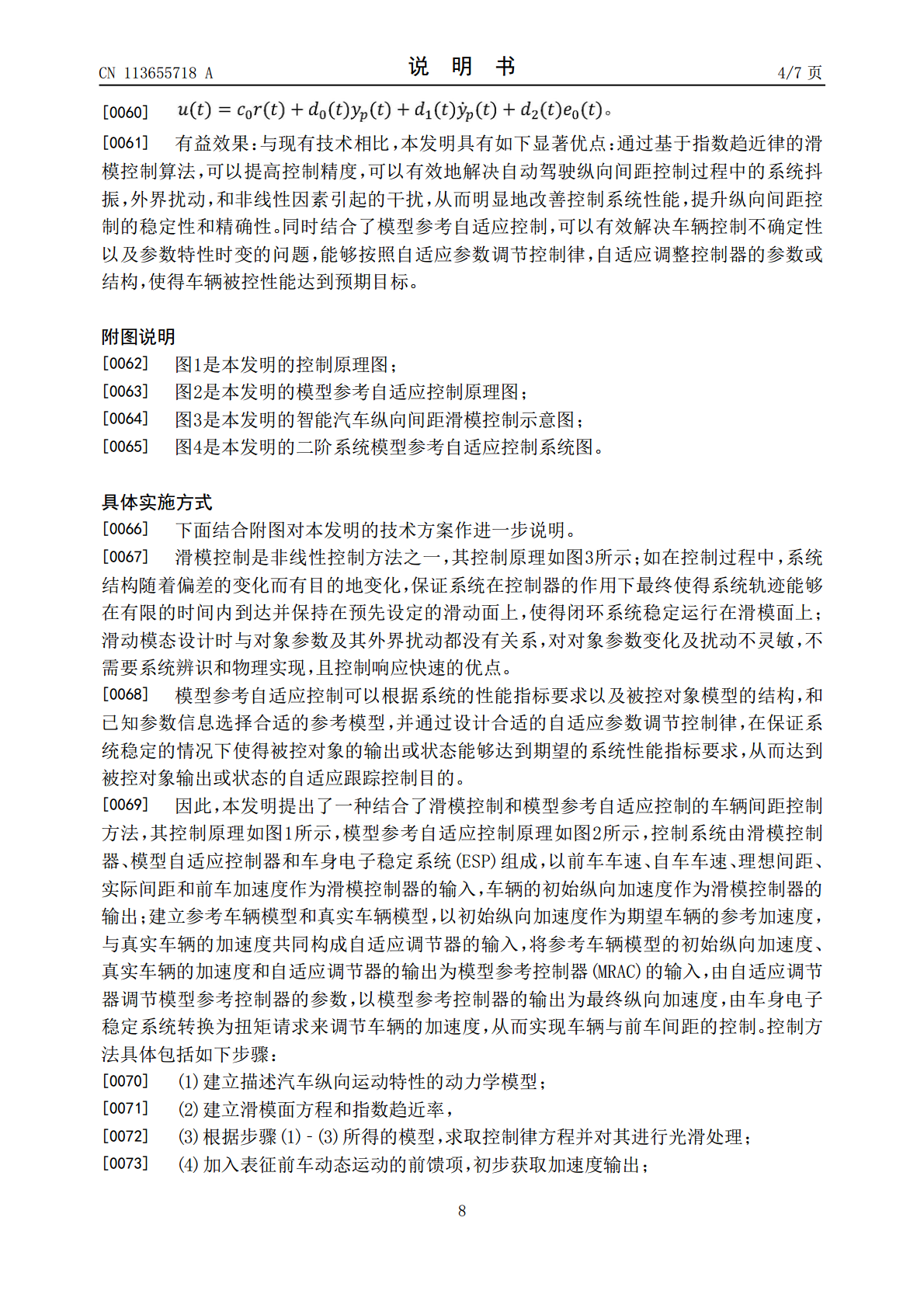
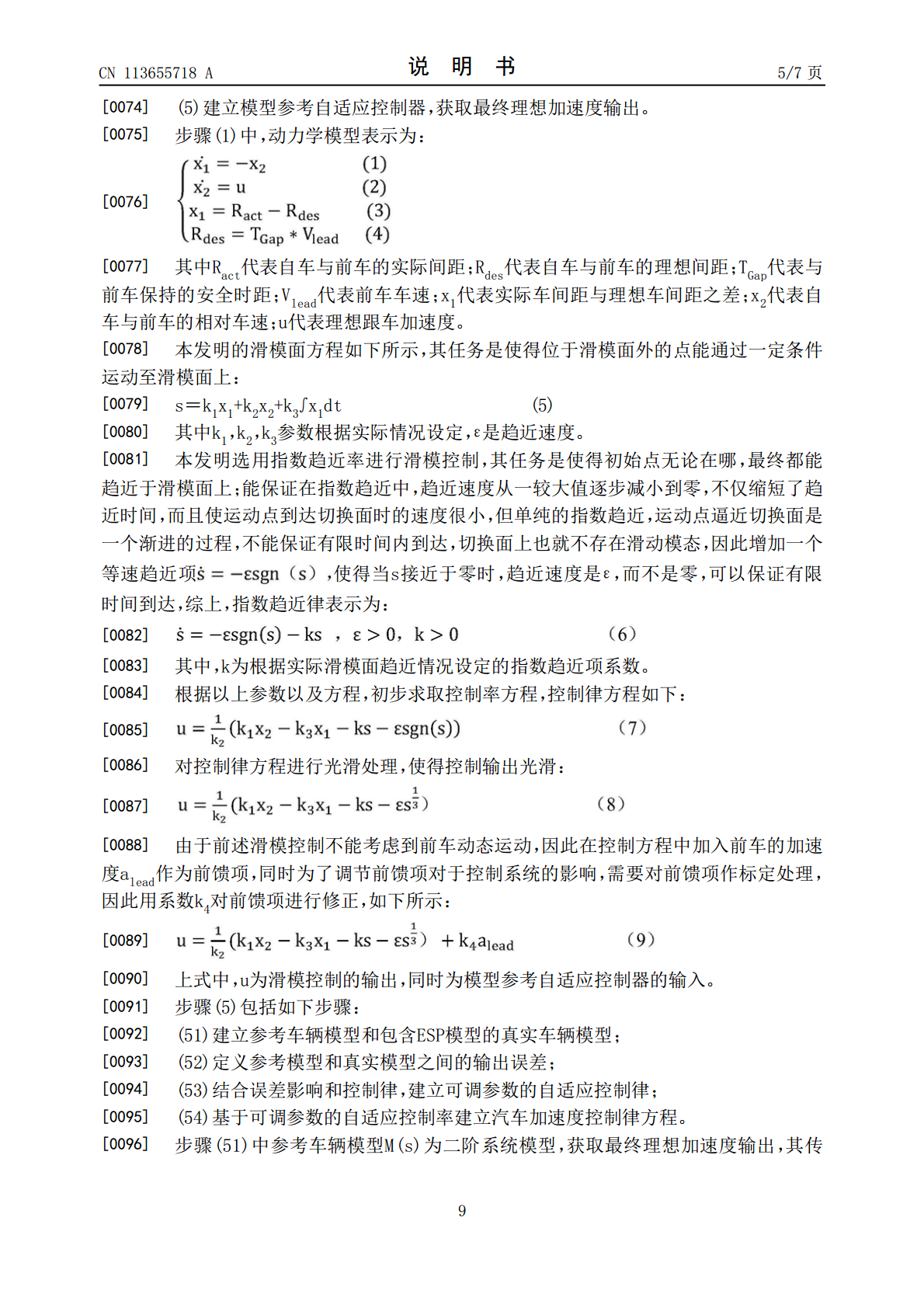
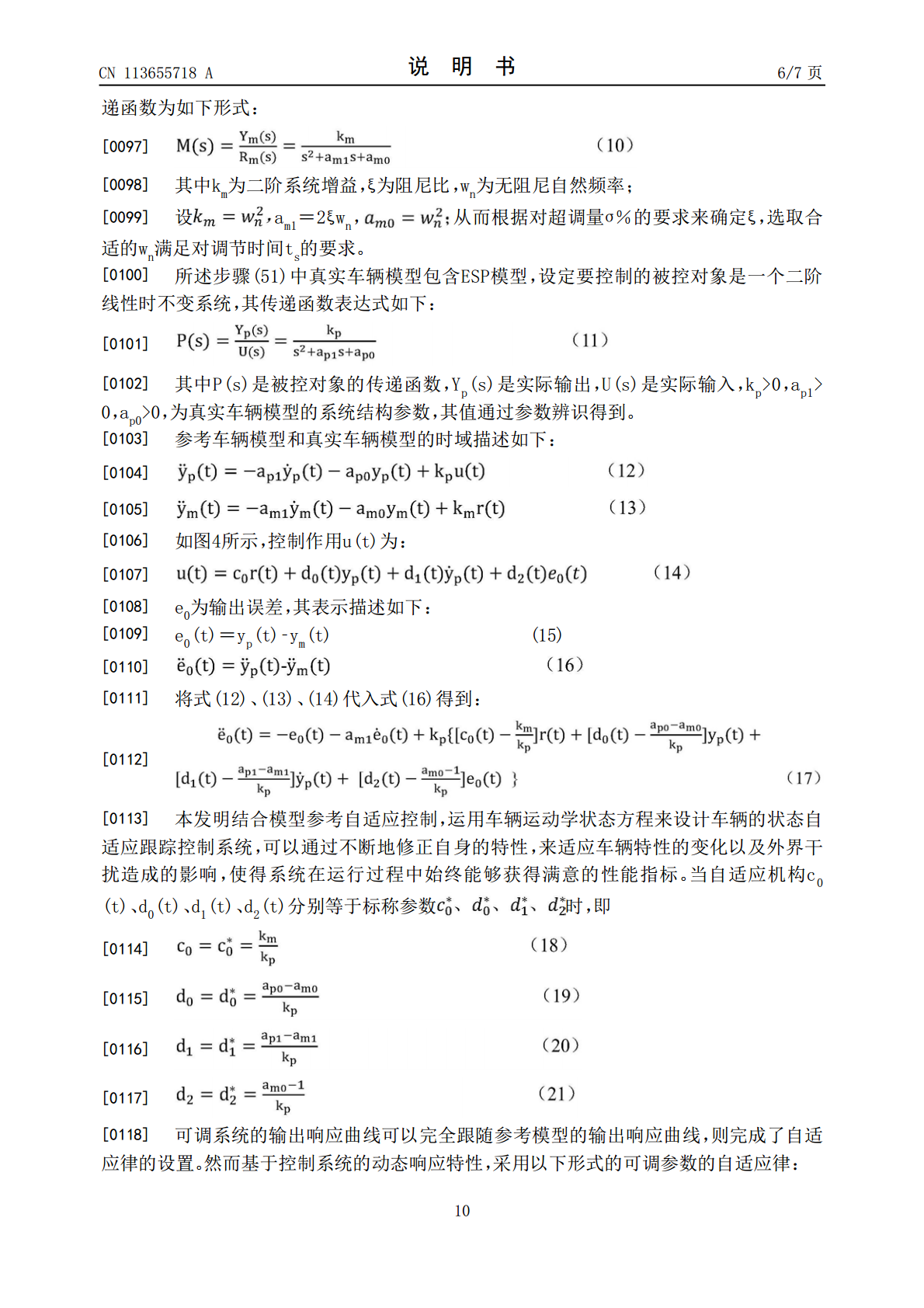
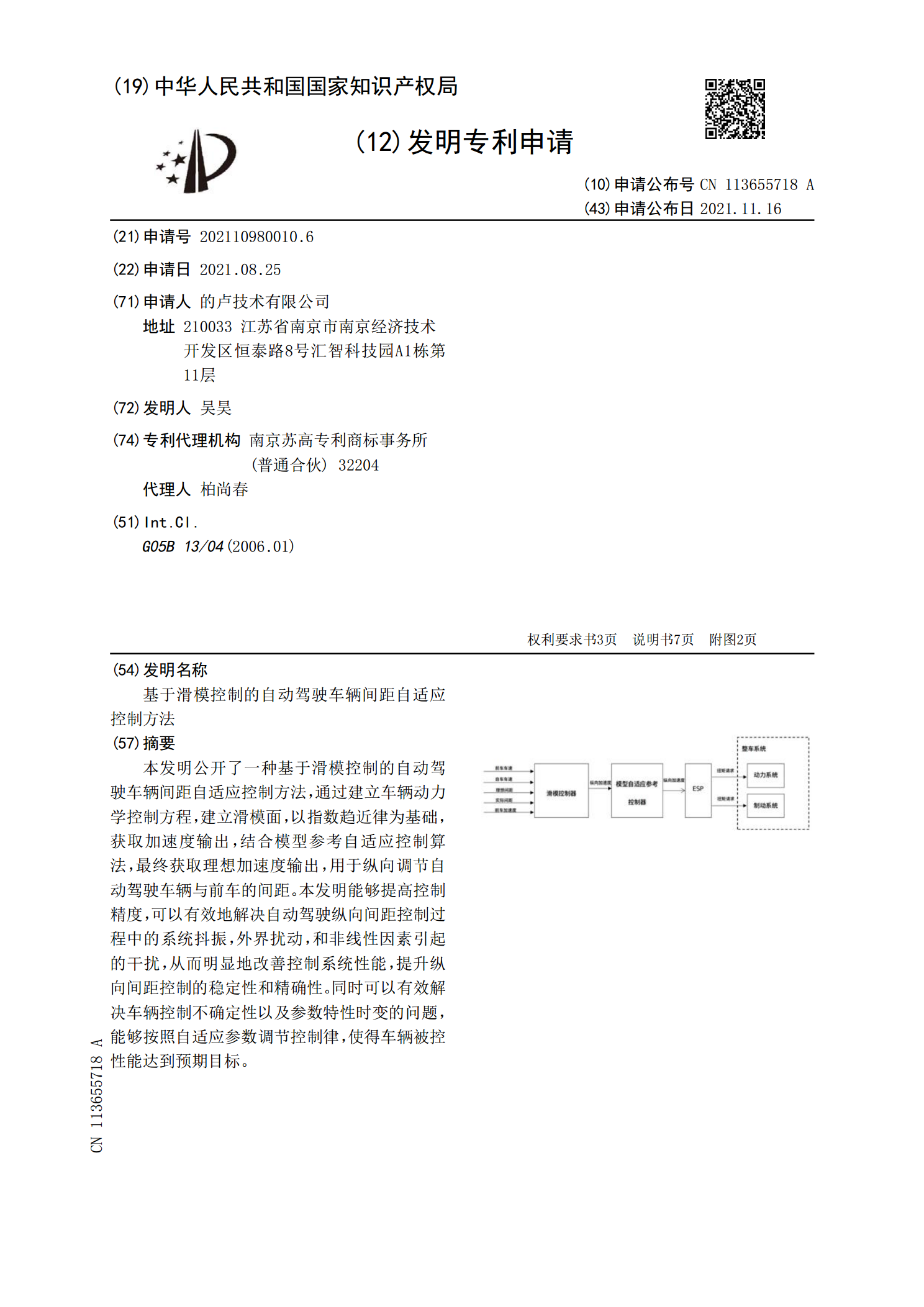
本发明公开了一种基于滑模控制的自动驾驶车辆间距自适应控制方法,通过建立车辆动力学控制方程,建立滑模面,以指数趋近律为基础,获取加速度输出,结合模型参考自适应控制算法,最终获取理想加速度输出,用于纵向调节自动驾驶车辆与前车的间距。本发明能够提高控制精度,可以有效地解决自动驾驶纵向间距控制过程中的系统抖振,外界扰动,和非线性因素引起的干扰,从而明显地改善控制系统性能,提升纵向间距控制的稳定性和精确性。同时可以有效解决车辆控制不确定性以及参数特性时变的问题,能够按照自适应参数调节控制律,使得车辆被控性能达到预期

基于自适应终端滑模控制的汽车线控转向控制方法.pdf
本发明公开了一种基于自适应终端滑模控制的汽车线控转向系统控制方法,步骤包括实时采集前轮转角δ
一种车辆的自适应巡航滑模控制方法.pdf
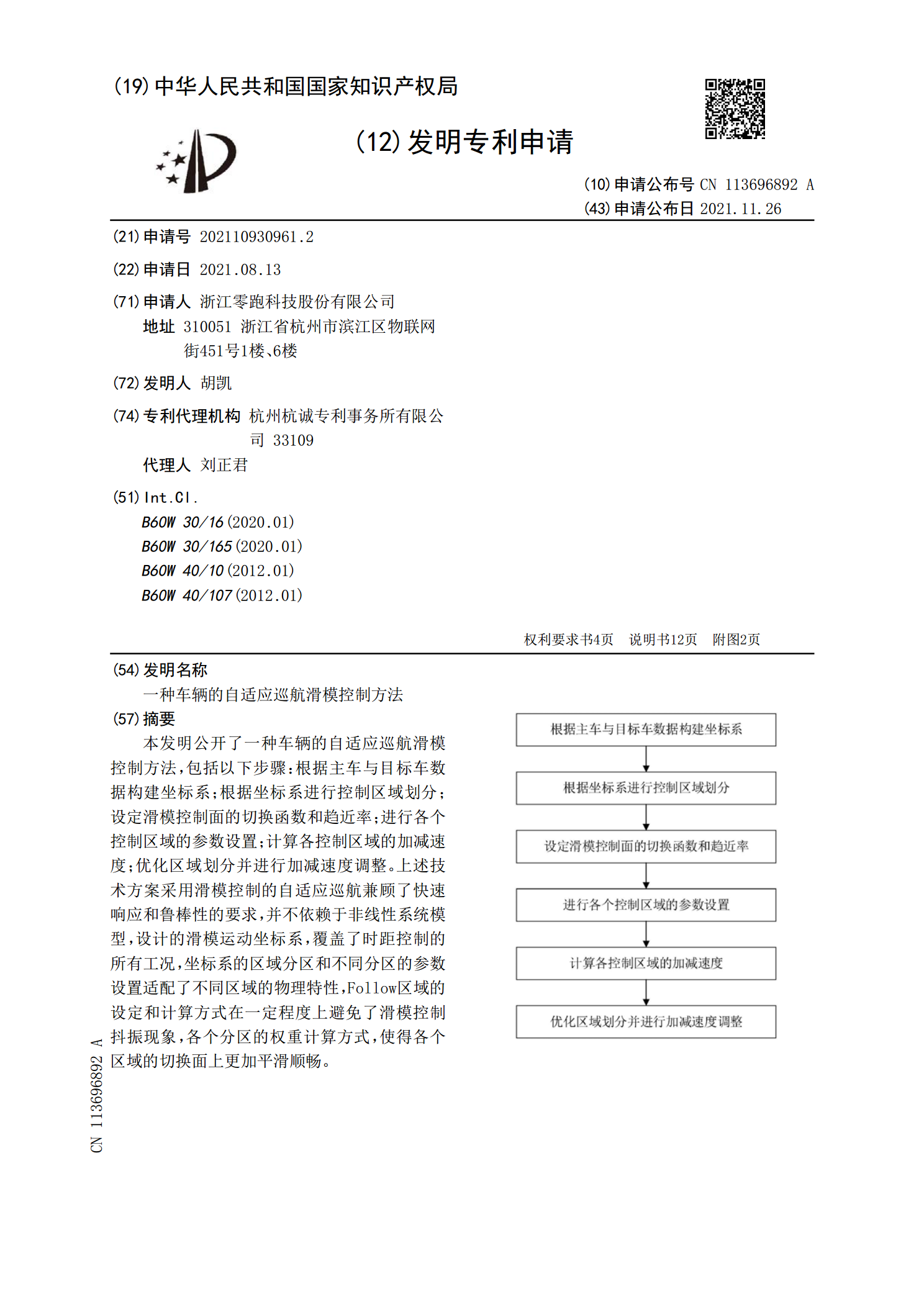
本发明公开了一种车辆的自适应巡航滑模控制方法,包括以下步骤:根据主车与目标车数据构建坐标系;根据坐标系进行控制区域划分;设定滑模控制面的切换函数和趋近率;进行各个控制区域的参数设置;计算各控制区域的加减速度;优化区域划分并进行加减速度调整。上述技术方案采用滑模控制的自适应巡航兼顾了快速响应和鲁棒性的要求,并不依赖于非线性系统模型,设计的滑模运动坐标系,覆盖了时距控制的所有工况,坐标系的区域分区和不同分区的参数设置适配了不同区域的物理特性,Follow区域的设定和计算方式在一定程度上避免了滑模控制抖振现象,
一种基于自适应学习的自动驾驶车辆轨迹跟踪控制方法.pdf
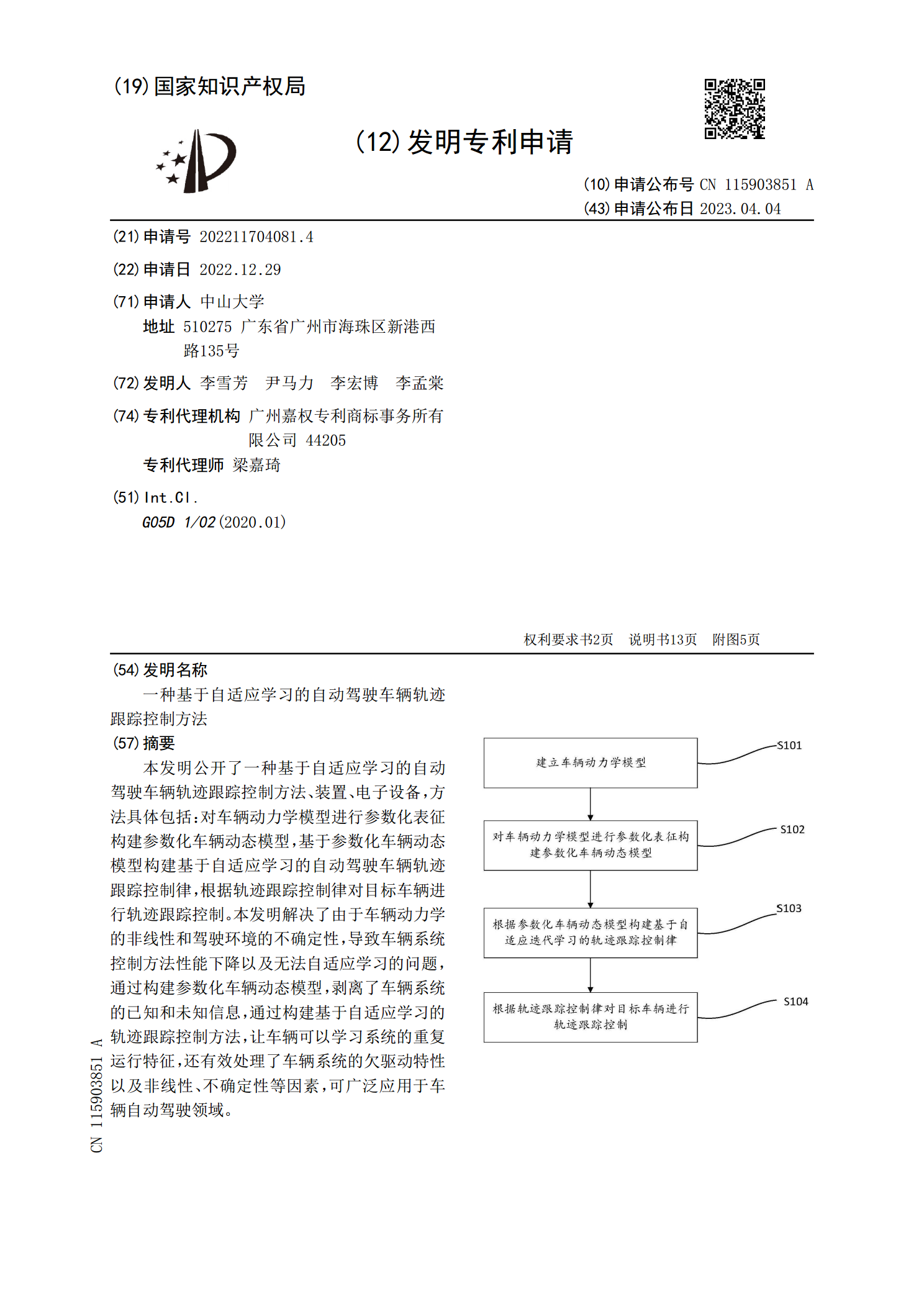
本发明公开了一种基于自适应学习的自动驾驶车辆轨迹跟踪控制方法、装置、电子设备,方法具体包括:对车辆动力学模型进行参数化表征构建参数化车辆动态模型,基于参数化车辆动态模型构建基于自适应学习的自动驾驶车辆轨迹跟踪控制律,根据轨迹跟踪控制律对目标车辆进行轨迹跟踪控制。本发明解决了由于车辆动力学的非线性和驾驶环境的不确定性,导致车辆系统控制方法性能下降以及无法自适应学习的问题,通过构建参数化车辆动态模型,剥离了车辆系统的已知和未知信息,通过构建基于自适应学习的轨迹跟踪控制方法,让车辆可以学习系统的重复运行特征,还
基于TDE的自适应超螺旋多变量快速终端滑模控制方法.pdf
本发明提出了一种基于TDE的自适应超螺旋多变量快速终端滑模控制方法,保证电缆驱动机械臂在复杂未知不确定性条件下的高精度轨迹跟踪控制。首先,设计关节的误差范围,在保证机械手安全性能的同时,保证关节位置与期望轮廓的偏差不太大,并利用时滞估计对剩余的集总系统动力学进行估计和补偿。其次,利用安全约束函数对角度错误期望进行设计分析,使不同截面的约束在统一的系统体系结构中处理;通过严格的分析,解决了带有输出约束和不确定性的机械臂运动轨迹问题。超螺旋自适应控制有效地保证了算法在满足运行中所有约束条件下的快速、准确和鲁棒