
基于滑模控制的车辆自适应巡航系统设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于滑模控制的车辆自适应巡航系统设计.docx
基于滑模控制的车辆自适应巡航系统设计摘要本论文主要针对车辆自适应巡航系统进行研究。提出了一种基于滑模控制的车辆自适应巡航系统设计方案,并对其进行了详细的分析与实验验证。试验结果表明,该方案在保证车辆安全性的前提下,具有良好的效果和鲁棒性。本研究成果可为车辆自适应巡航技术的进一步研究提供参考。关键词:车辆自适应巡航系统;滑模控制;安全性;效果;鲁棒性。1.引言车辆自适应巡航系统是现代汽车智能化技术的重要组成部分,它可以帮助驾驶员更加舒适和安全地驾驶车辆。然而,目前车辆自适应巡航系统还存在一些技术问题,如对车
一种车辆的自适应巡航滑模控制方法.pdf
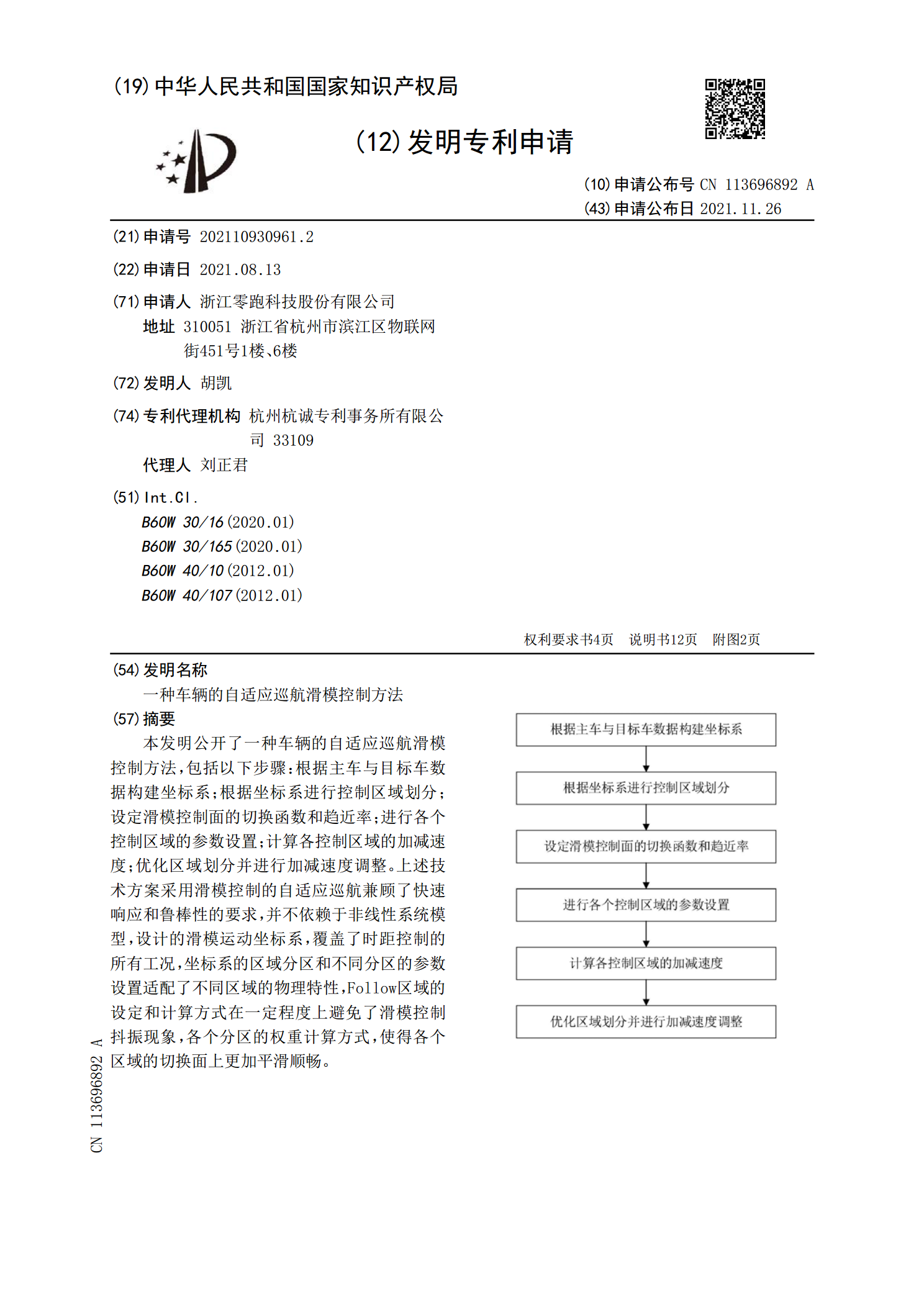
本发明公开了一种车辆的自适应巡航滑模控制方法,包括以下步骤:根据主车与目标车数据构建坐标系;根据坐标系进行控制区域划分;设定滑模控制面的切换函数和趋近率;进行各个控制区域的参数设置;计算各控制区域的加减速度;优化区域划分并进行加减速度调整。上述技术方案采用滑模控制的自适应巡航兼顾了快速响应和鲁棒性的要求,并不依赖于非线性系统模型,设计的滑模运动坐标系,覆盖了时距控制的所有工况,坐标系的区域分区和不同分区的参数设置适配了不同区域的物理特性,Follow区域的设定和计算方式在一定程度上避免了滑模控制抖振现象,

车辆自适应巡航控制系统ACC设计.docx
车辆自适应巡航控制系统(ACC)设计与分析付裕引言ACC系统全称就是自适应巡航控制系统,它是一种智能化的行车自动控制系统,它是在早已存在的定速巡航控制技术的基础上发展而来的。在行驶过程中,安装在车辆前部的车距传感器会持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前面的车之间的距离过小时(这可以在车内设定距离),ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,同时车内音响会发出警报声音提醒走神的驾驶员注意,它能有效的防止追尾这类事故的发生。本

车辆自适应巡航控制系统的设计与仿真分析.docx
车辆自适应巡航控制系统的设计与仿真分析车辆自适应巡航控制系统的设计与仿真分析摘要:随着科技的不断发展,车辆自适应巡航控制系统逐渐成为了现代车辆的重要配备之一。本论文首先介绍了自适应巡航控制系统的原理和功能,然后详细设计并模拟了一个车辆自适应巡航控制系统,并对该系统进行了性能分析和优化。最后,通过仿真实验验证了该系统的稳定性和效果。关键词:车辆自适应巡航控制系统,设计,仿真分析,性能优化1.引言车辆自适应巡航控制系统是一种基于车辆感知和控制技术的智能驾驶辅助系统,可以实现自动保持车辆在预设速度下匀速行驶,并

基于模糊控制的汽车自适应巡航系统设计.pptx
基于模糊控制的汽车自适应巡航系统设计目录添加章节标题汽车自适应巡航系统概述汽车自适应巡航系统的定义和功能汽车自适应巡航系统的应用和发展趋势模糊控制理论在汽车自适应巡航系统中的应用模糊控制理论的基本概念和原理模糊控制理论在汽车自适应巡航系统中的应用优势模糊控制理论在汽车自适应巡航系统中的实现方法基于模糊控制的汽车自适应巡航系统设计系统总体设计传感器设计和选择控制算法设计和实现系统测试和验证基于模糊控制的汽车自适应巡航系统的优势和局限性系统优势分析系统局限性分析系统改进和优化方向未来展望和研究方向未来展望研究