
一种车辆自适应控制方法及其装置.pdf

一只****呀盟

1/10
2/10
3/10
4/10

5/10
6/10
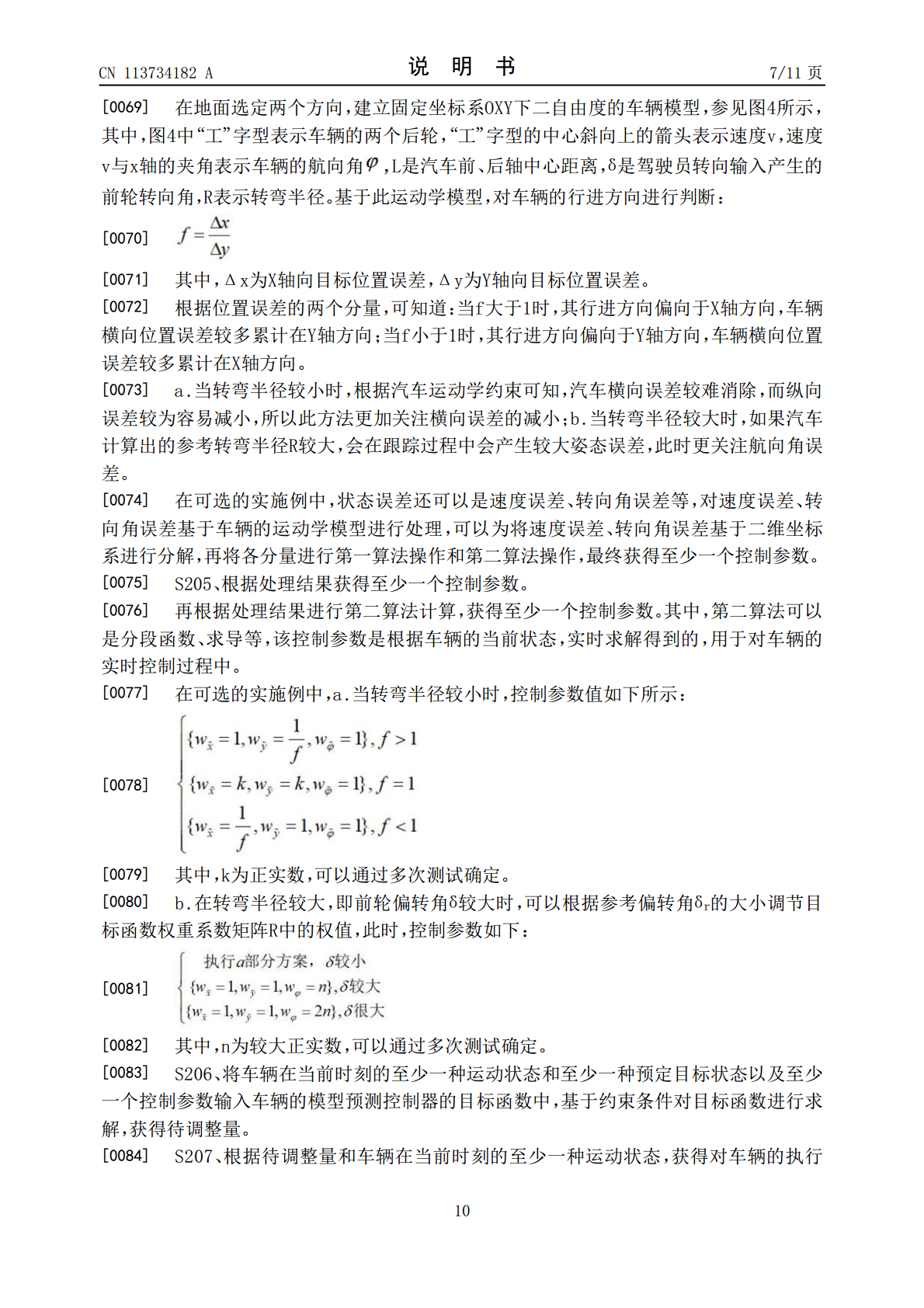
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆自适应控制方法及其装置.pdf
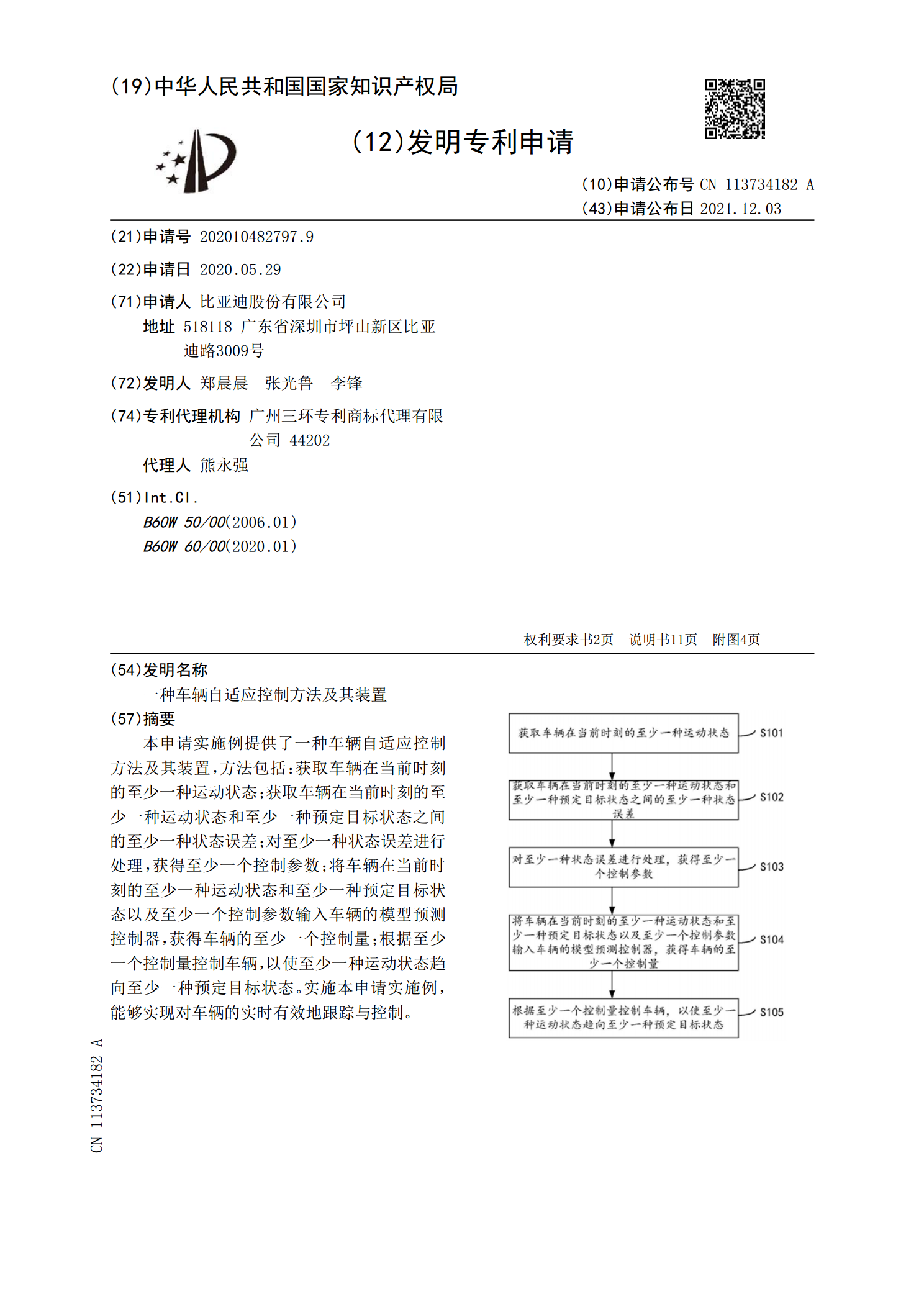
本申请实施例提供了一种车辆自适应控制方法及其装置,方法包括:获取车辆在当前时刻的至少一种运动状态;获取车辆在当前时刻的至少一种运动状态和至少一种预定目标状态之间的至少一种状态误差;对至少一种状态误差进行处理,获得至少一个控制参数;将车辆在当前时刻的至少一种运动状态和至少一种预定目标状态以及至少一个控制参数输入车辆的模型预测控制器,获得车辆的至少一个控制量;根据至少一个控制量控制车辆,以使至少一种运动状态趋向至少一种预定目标状态。实施本申请实施例,能够实现对车辆的实时有效地跟踪与控制。
轮式车辆自适应承载与驱动装置及其控制方法.pdf
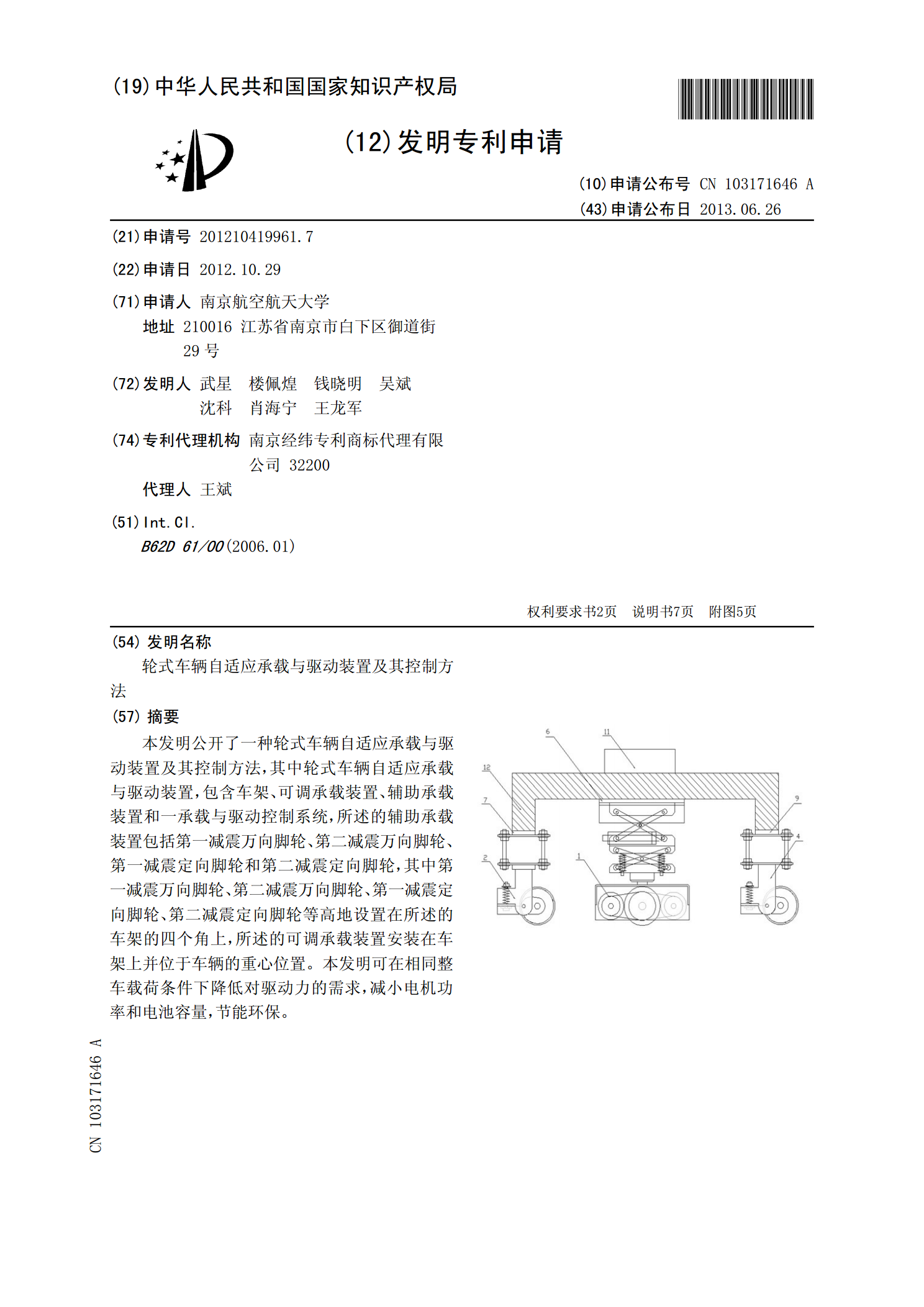
本发明公开了一种轮式车辆自适应承载与驱动装置及其控制方法,其中轮式车辆自适应承载与驱动装置,包含车架、可调承载装置、辅助承载装置和一承载与驱动控制系统,所述的辅助承载装置包括第一减震万向脚轮、第二减震万向脚轮、第一减震定向脚轮和第二减震定向脚轮,其中第一减震万向脚轮、第二减震万向脚轮、第一减震定向脚轮、第二减震定向脚轮等高地设置在所述的车架的四个角上,所述的可调承载装置安装在车架上并位于车辆的重心位置。本发明可在相同整车载荷条件下降低对驱动力的需求,减小电机功率和电池容量,节能环保。
自适应巡航控制方法、装置和车辆.pdf
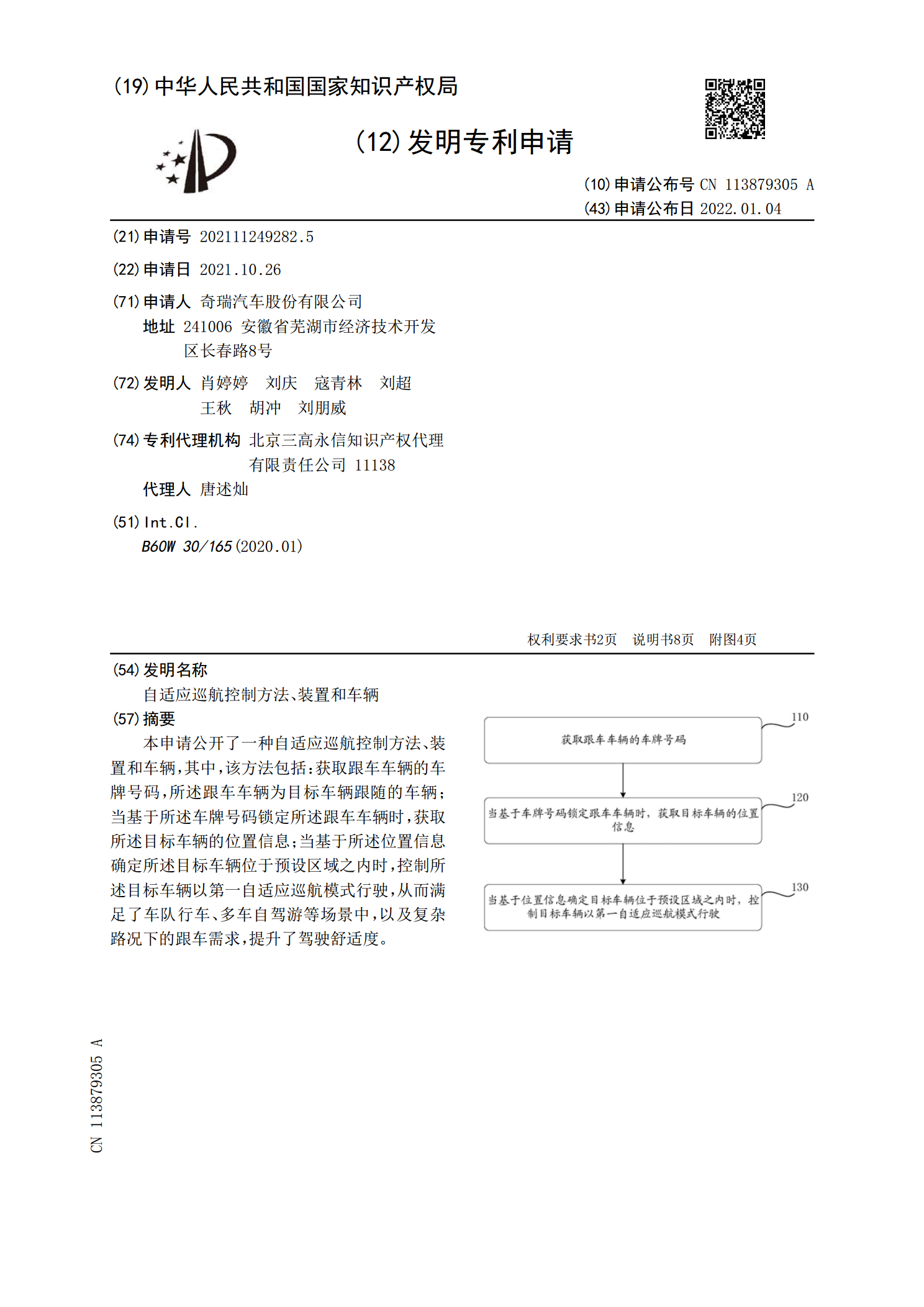
本申请公开了一种自适应巡航控制方法、装置和车辆,其中,该方法包括:获取跟车车辆的车牌号码,所述跟车车辆为目标车辆跟随的车辆;当基于所述车牌号码锁定所述跟车车辆时,获取所述目标车辆的位置信息;当基于所述位置信息确定所述目标车辆位于预设区域之内时,控制所述目标车辆以第一自适应巡航模式行驶,从而满足了车队行车、多车自驾游等场景中,以及复杂路况下的跟车需求,提升了驾驶舒适度。
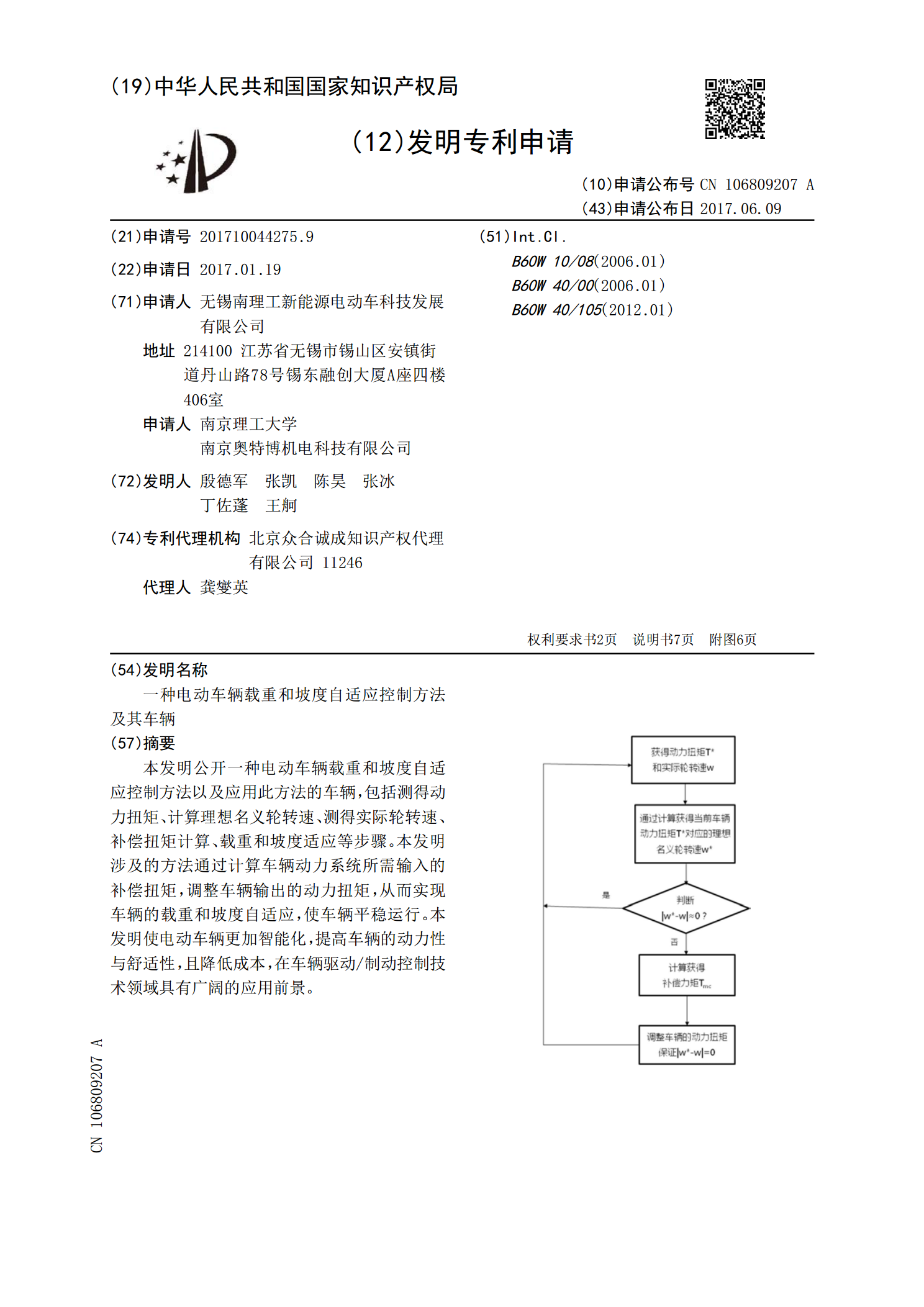
一种电动车辆载重和坡度自适应控制方法及其车辆.pdf
本发明公开一种电动车辆载重和坡度自适应控制方法以及应用此方法的车辆,包括测得动力扭矩、计算理想名义轮转速、测得实际轮转速、补偿扭矩计算、载重和坡度适应等步骤。本发明涉及的方法通过计算车辆动力系统所需输入的补偿扭矩,调整车辆输出的动力扭矩,从而实现车辆的载重和坡度自适应,使车辆平稳运行。本发明使电动车辆更加智能化,提高车辆的动力性与舒适性,且降低成本,在车辆驱动/制动控制技术领域具有广阔的应用前景。
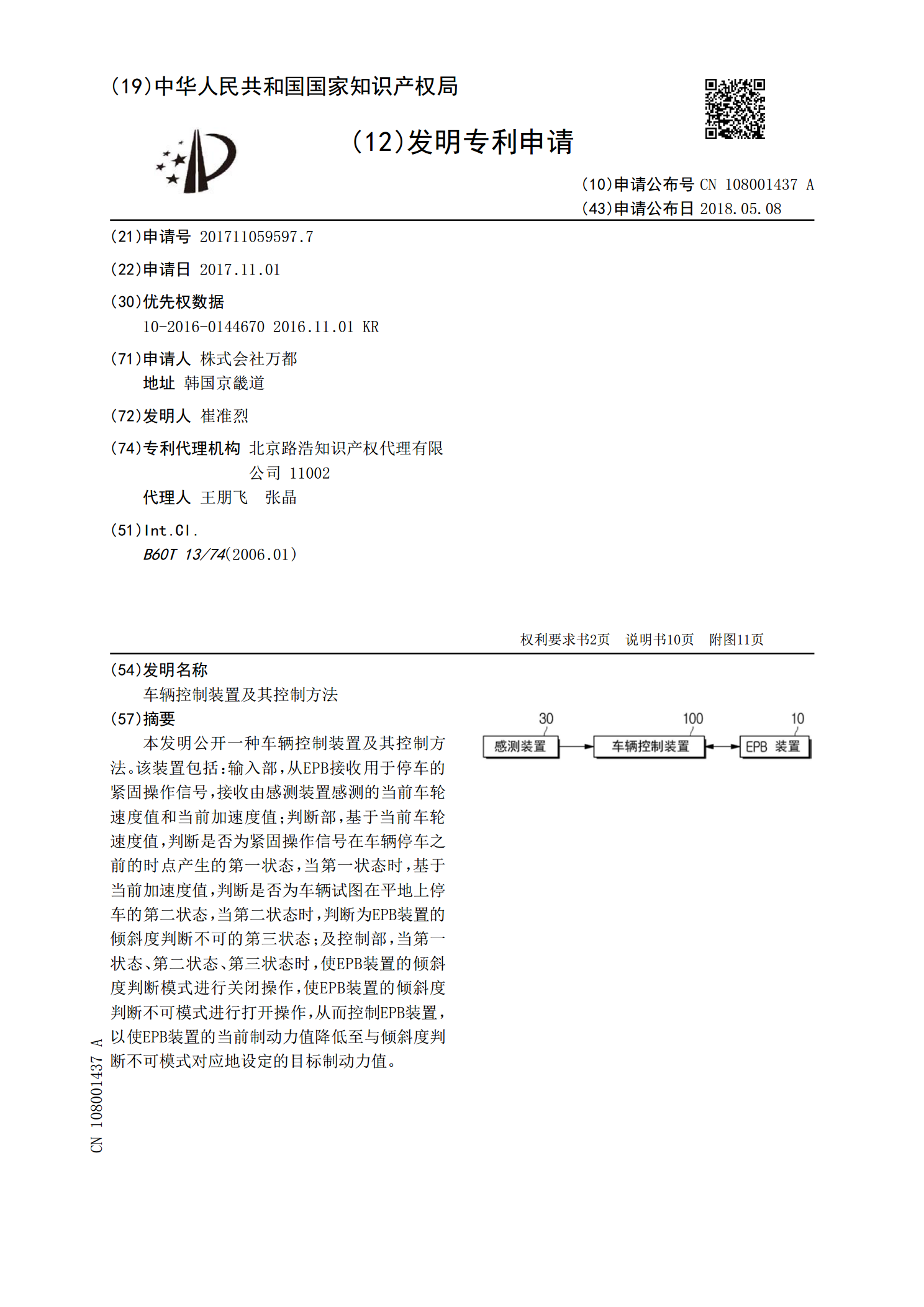
车辆控制装置及其控制方法.pdf
本发明公开一种车辆控制装置及其控制方法。该装置包括:输入部,从EPB接收用于停车的紧固操作信号,接收由感测装置感测的当前车轮速度值和当前加速度值;判断部,基于当前车轮速度值,判断是否为紧固操作信号在车辆停车之前的时点产生的第一状态,当第一状态时,基于当前加速度值,判断是否为车辆试图在平地上停车的第二状态,当第二状态时,判断为EPB装置的倾斜度判断不可的第三状态;及控制部,当第一状态、第二状态、第三状态时,使EPB装置的倾斜度判断模式进行关闭操作,使EPB装置的倾斜度判断不可模式进行打开操作,从而控制EPB