
一种电动车辆载重和坡度自适应控制方法及其车辆.pdf

文阁****23


1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电动车辆载重和坡度自适应控制方法及其车辆.pdf
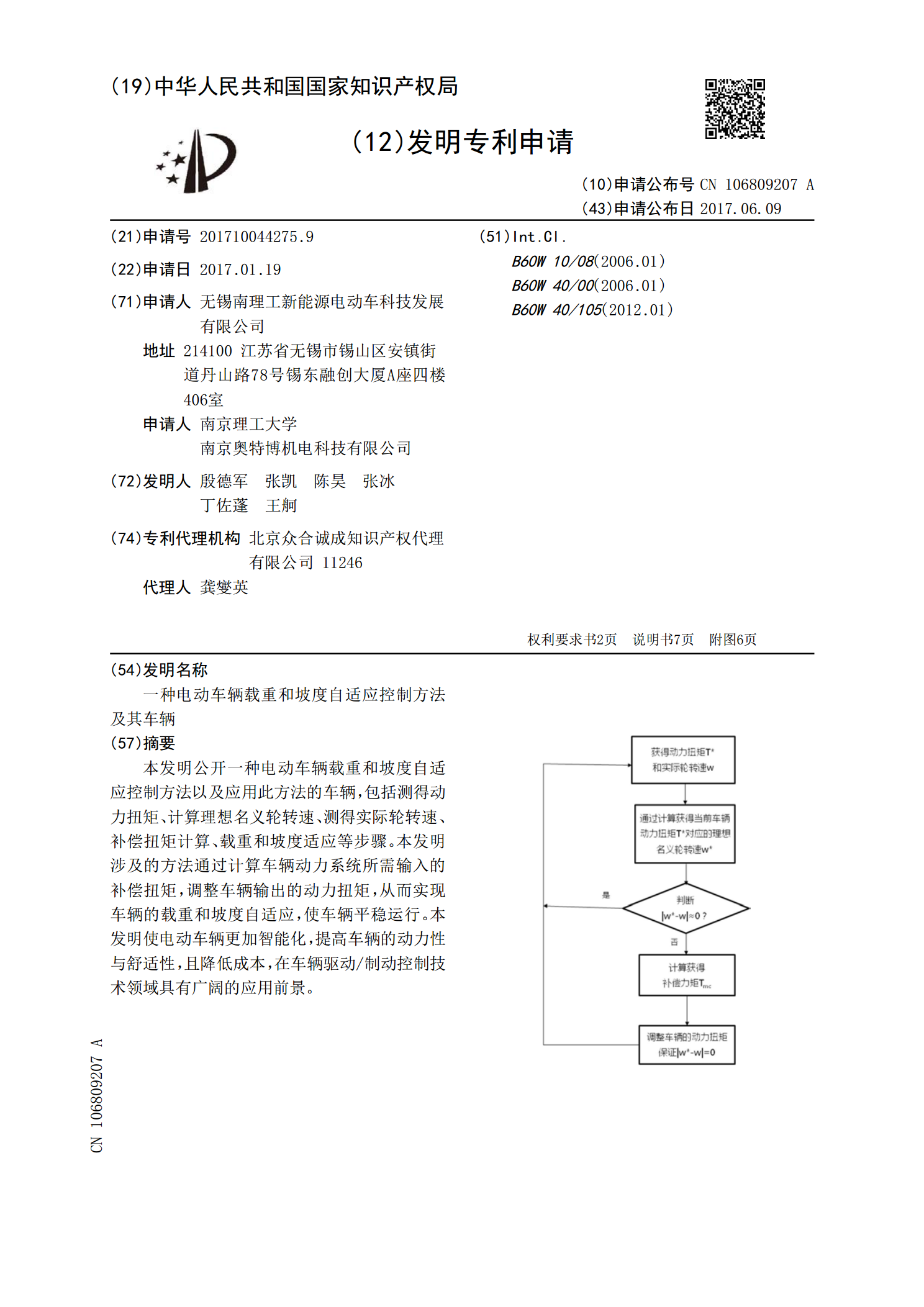
本发明公开一种电动车辆载重和坡度自适应控制方法以及应用此方法的车辆,包括测得动力扭矩、计算理想名义轮转速、测得实际轮转速、补偿扭矩计算、载重和坡度适应等步骤。本发明涉及的方法通过计算车辆动力系统所需输入的补偿扭矩,调整车辆输出的动力扭矩,从而实现车辆的载重和坡度自适应,使车辆平稳运行。本发明使电动车辆更加智能化,提高车辆的动力性与舒适性,且降低成本,在车辆驱动/制动控制技术领域具有广阔的应用前景。
电动车辆和电动车辆的控制方法.pdf
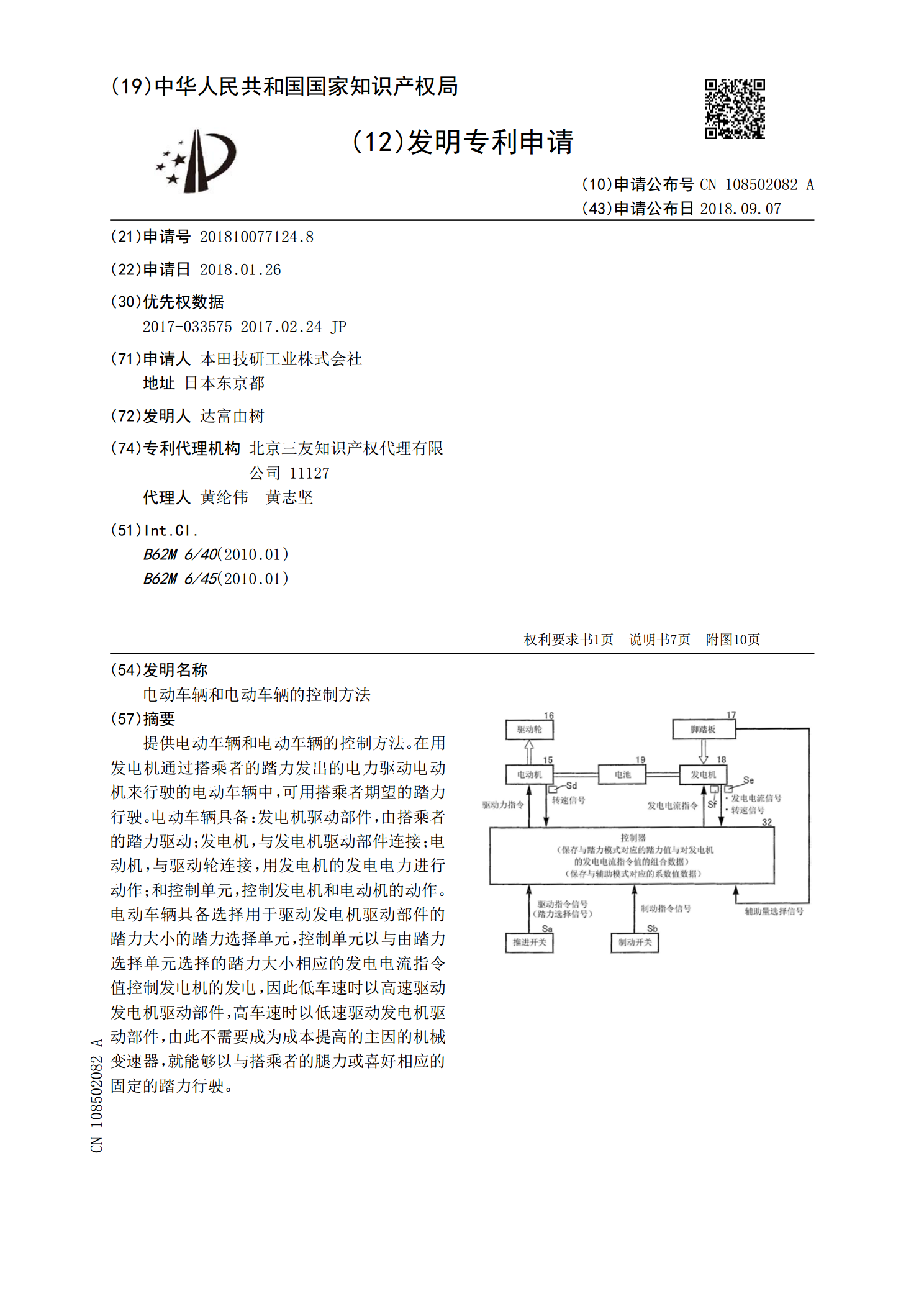
提供电动车辆和电动车辆的控制方法。在用发电机通过搭乘者的踏力发出的电力驱动电动机来行驶的电动车辆中,可用搭乘者期望的踏力行驶。电动车辆具备:发电机驱动部件,由搭乘者的踏力驱动;发电机,与发电机驱动部件连接;电动机,与驱动轮连接,用发电机的发电电力进行动作;和控制单元,控制发电机和电动机的动作。电动车辆具备选择用于驱动发电机驱动部件的踏力大小的踏力选择单元,控制单元以与由踏力选择单元选择的踏力大小相应的发电电流指令值控制发电机的发电,因此低车速时以高速驱动发电机驱动部件,高车速时以低速驱动发电机驱动部件,由
一种车辆自适应控制方法及其装置.pdf
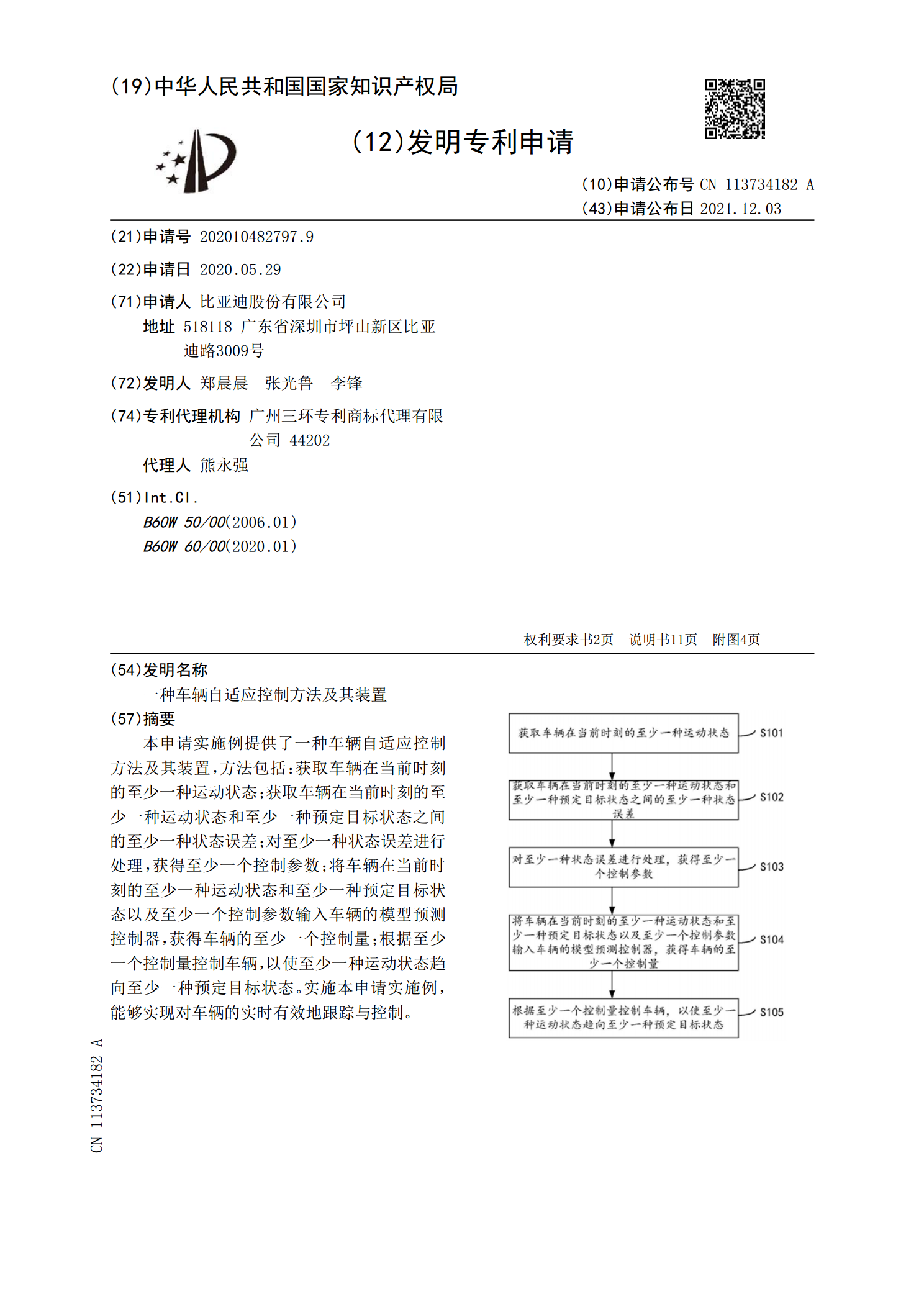
本申请实施例提供了一种车辆自适应控制方法及其装置,方法包括:获取车辆在当前时刻的至少一种运动状态;获取车辆在当前时刻的至少一种运动状态和至少一种预定目标状态之间的至少一种状态误差;对至少一种状态误差进行处理,获得至少一个控制参数;将车辆在当前时刻的至少一种运动状态和至少一种预定目标状态以及至少一个控制参数输入车辆的模型预测控制器,获得车辆的至少一个控制量;根据至少一个控制量控制车辆,以使至少一种运动状态趋向至少一种预定目标状态。实施本申请实施例,能够实现对车辆的实时有效地跟踪与控制。

电动车辆及其控制方法.pdf
电动车辆(100)具有:电动发电机(MG),构成为能够在该电动发电机和与驱动轮(80)联结的驱动轴(60)之间相互传递转矩;包括蓄电装置(B)的直流电源(10#);和变换器(14),用于在直流电源和电动发电机之间进行双向的直流/交流电力变换。MG-ECU(35)按照电动发电机的转矩指令值(Trqcom)和状态值来控制多个电力用半导体开关元件(Q3-Q8)的接通断开。MG-ECU(35)在加速踏板(51)释放时,根据蓄电装置(B)的充电状态来控制变换器(14),以在电动发电机(MG)的各相交流电流上叠加直流

电动车辆及其控制方法.pdf
本发明的目的在于提供一种能够安全地避开障碍物的电动车辆。电动轮椅(11)构成为具备:车身部(12);检测操作者的操作的操作部(13);检测存在于车身部(12)的周边的障碍物的障碍物传感器(14);将从车身部(12)向操作方向生成的区域作为检索区域(21),将存在于检索区域(21)内的障碍物判断成应避开的障碍物的障碍物判断部(15);算出用于远离由障碍物判断部判断出的障碍物的假想斥力的假想斥力算出部(16);算出操作力及假想斥力的合力的合力算出部(17);进行控制以使车身部向合力的方向移动的控制部(18)。