
一种手术机器人导航定位方法及装置.pdf

是浩****32


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种手术机器人导航定位方法及装置.pdf
本发明实施例提供了一种手术机器人导航定位方法及装置,涉及数据处理技术领域,上述方法包括:获得多张二维图像;对各二维图像与目标对象的三维图像进行图像配准,得到第一转换关系;识别各二维图像中的标识物,得到标识物的图像位置;根据所得的各图像位置、标识物在标定坐标系下的标定位置以及第二转换关系,计算第三转换关系;基于第一转换关系以及第三转换关系,将依据三维图像规划出的手术路径转换为目标坐标系下的目标路径;根据目标路径,对手术机器人进行导航定位。应用本发明实施例提供的手术机器人导航定位方案,能够对手术机器人进行导航

一种手术机器人导航定位方法及装置.pdf
本发明实施例提供了一种手术机器人导航定位方法及装置,涉及数据处理技术领域,上述方法包括:获得图像采集设备采集的三维图像;在三维图像中规划对目标对象进行手术的手术路径;识别三维图像中的标识物,得到标识物在三维图像所在的图像坐标系下的图像位置;根据所得图像位置、预先得到的标定位置以及第一转换关系,计算图像坐标系与目标坐标系之间的第二转换关系;基于第二转换关系,将手术路径转换为目标坐标系下的目标路径;根据目标路径,对手术机器人进行导航定位。应用本发明实施例提供的手术机器人导航定位方案,能够对手术机器人进行导航定
一种双臂手术机器人导航定位方法.pdf
本发明实施例公开了一种双臂手术机器人导航定位方法,本方法用于医疗机械臂的精准定位,包括具有台面坐标系的手术台车,所述手术台车上设有导航机械臂与定位机械臂;获取病人医学影像信息;依据病人医学影像信息勾画病灶轮廓,构建三维可视化病灶建模,确定三维可视化病灶建模内的手术靶点坐标,规划导航机械臂的导航路径;建立病人体表坐标系与台面坐标系之间的坐标映射关系,控制导航机械臂移动到对应手术靶点坐标的台面指定坐标。所述双臂手术机器人导航定位方法不需要额外的光学定位或电磁定位装置,从而节省成本、节省手术室空间及提高了手术准
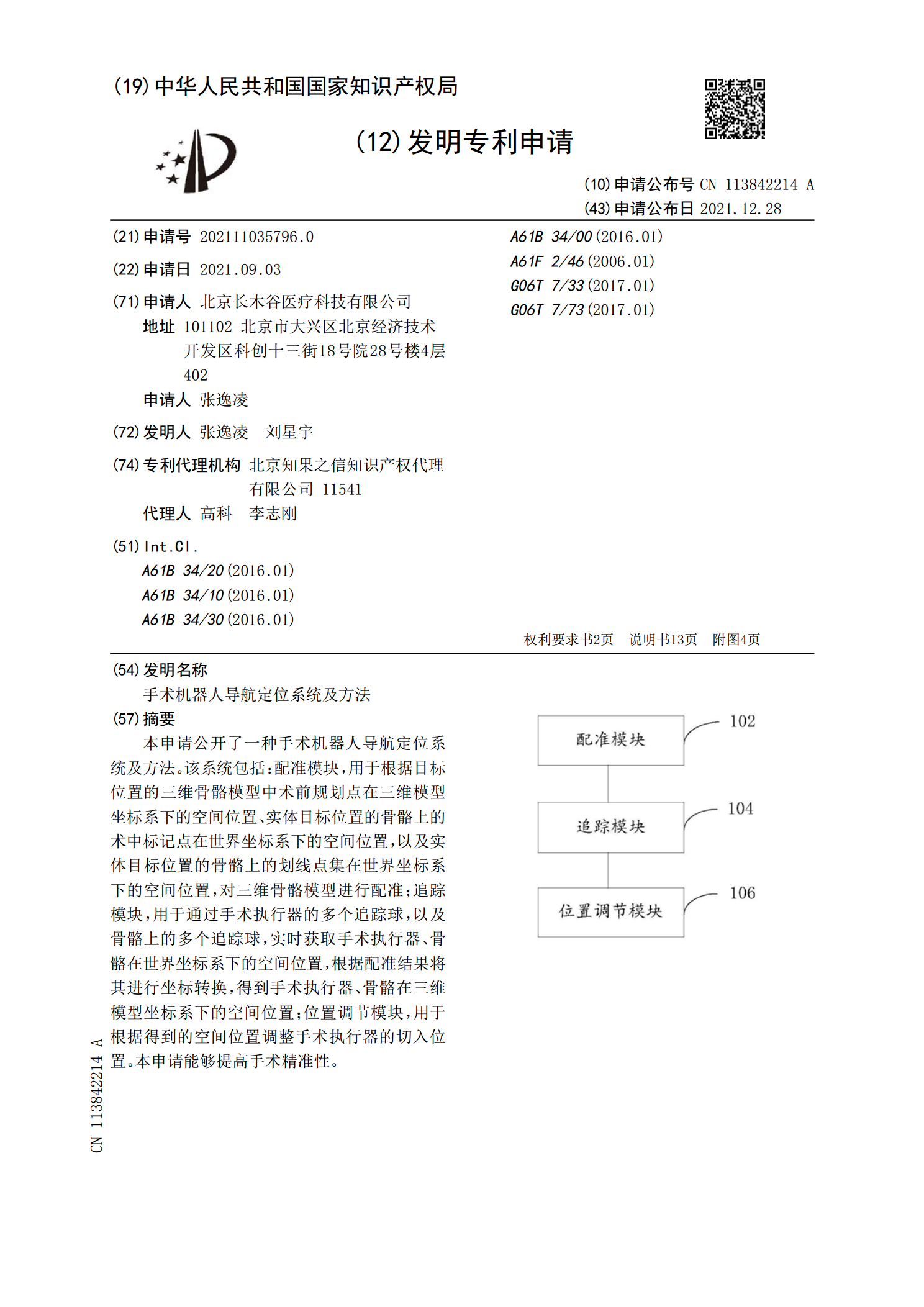
手术机器人导航定位系统及方法.pdf
本申请公开了一种手术机器人导航定位系统及方法。该系统包括:配准模块,用于根据目标位置的三维骨骼模型中术前规划点在三维模型坐标系下的空间位置、实体目标位置的骨骼上的术中标记点在世界坐标系下的空间位置,以及实体目标位置的骨骼上的划线点集在世界坐标系下的空间位置,对三维骨骼模型进行配准;追踪模块,用于通过手术执行器的多个追踪球,以及骨骼上的多个追踪球,实时获取手术执行器、骨骼在世界坐标系下的空间位置,根据配准结果将其进行坐标转换,得到手术执行器、骨骼在三维模型坐标系下的空间位置;位置调节模块,用于根据得到的空间
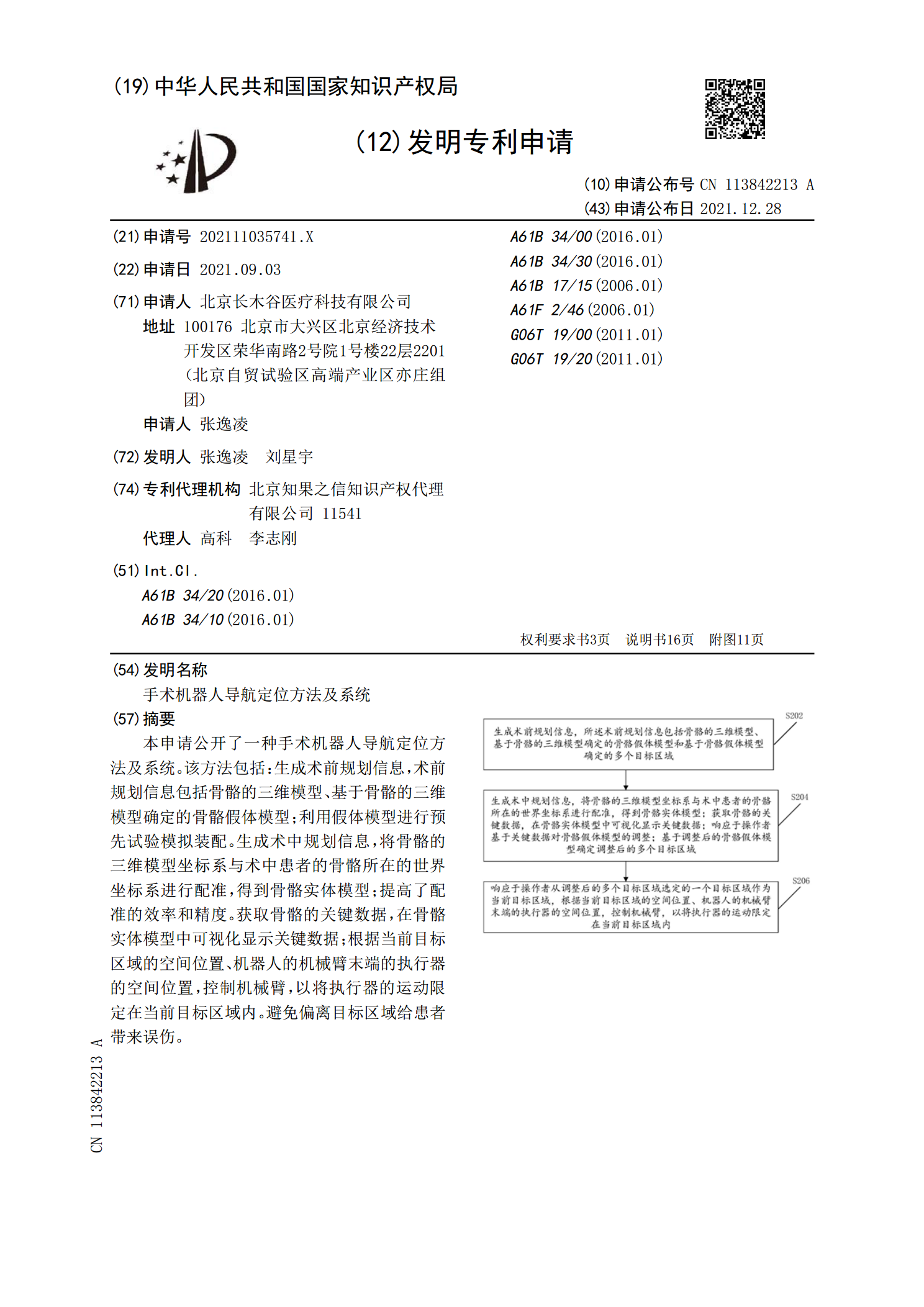
手术机器人导航定位方法及系统.pdf
本申请公开了一种手术机器人导航定位方法及系统。该方法包括:生成术前规划信息,术前规划信息包括骨骼的三维模型、基于骨骼的三维模型确定的骨骼假体模型;利用假体模型进行预先试验模拟装配。生成术中规划信息,将骨骼的三维模型坐标系与术中患者的骨骼所在的世界坐标系进行配准,得到骨骼实体模型;提高了配准的效率和精度。获取骨骼的关键数据,在骨骼实体模型中可视化显示关键数据;根据当前目标区域的空间位置、机器人的机械臂末端的执行器的空间位置,控制机械臂,以将执行器的运动限定在当前目标区域内。避免偏离目标区域给患者带来误伤。