
一种机器人相对定位方法和装置.pdf

春波****公主


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人相对定位方法和装置.pdf
本发明提供了一种机器人相对定位方法和装置,所述机器人相对定位方法,包括:使第一机器人和第二机器人之间的相对距离小于或等于预设距离;控制所述第一机器人使用激光测距传感器向所述第二机器人发射测距光;检测所述测距光获取的距离是否相等;若否,则调整所述第二机器人的相对姿态,并再次检测所述测距光获取的距离是否相等;若是,则所述第一机器人和所述第二机器人实现对接姿态;控制所述第一机器人和所述第二机器人减少相对距离并进行对接。本发明能针对机器人对接进行了优化,通过激光测距差来调整对接姿态和相对距离,使对接视野不受机器人
一种轮式机器人的定位方法和装置.pdf
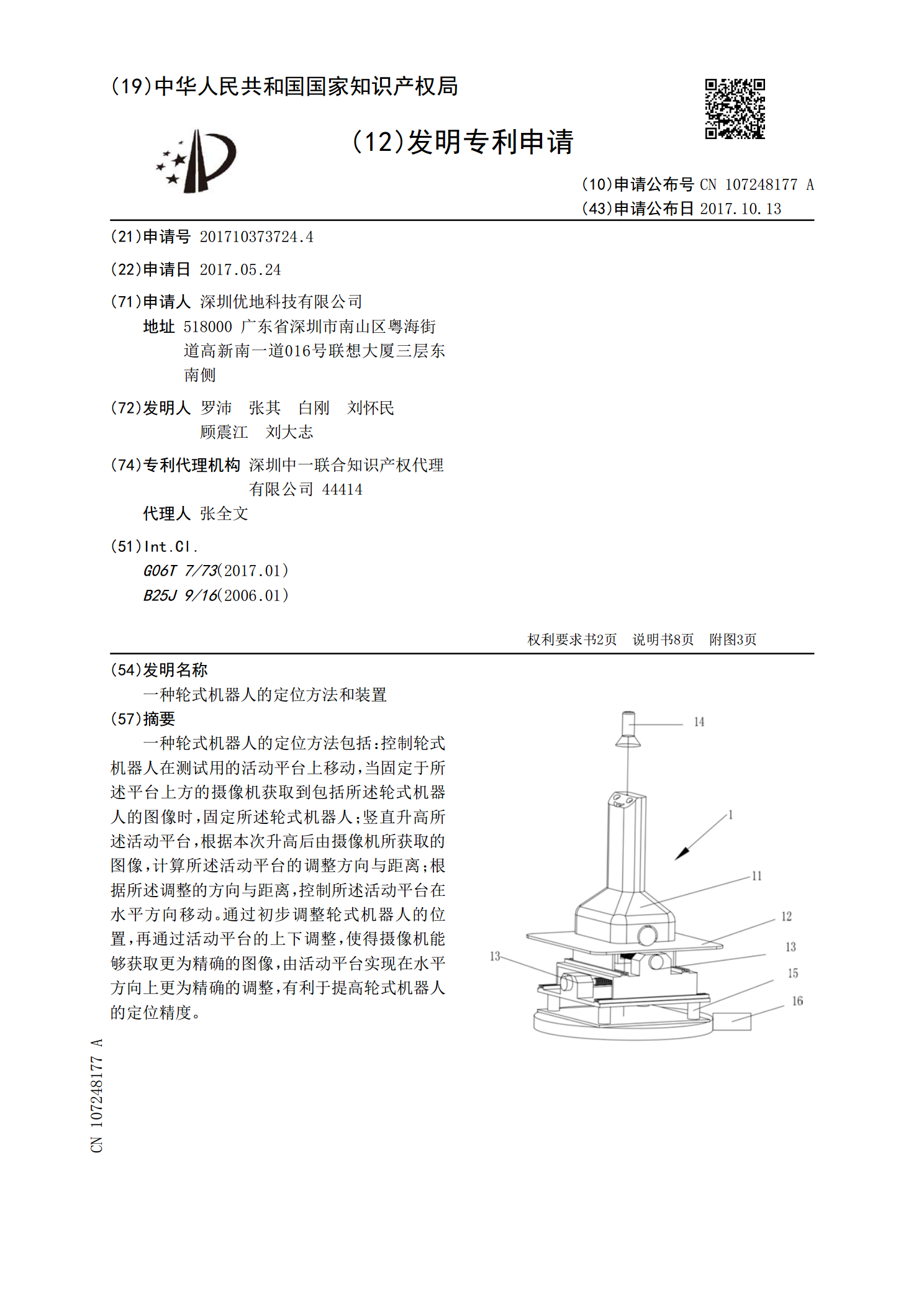
一种轮式机器人的定位方法包括:控制轮式机器人在测试用的活动平台上移动,当固定于所述平台上方的摄像机获取到包括所述轮式机器人的图像时,固定所述轮式机器人;竖直升高所述活动平台,根据本次升高后由摄像机所获取的图像,计算所述活动平台的调整方向与距离;根据所述调整的方向与距离,控制所述活动平台在水平方向移动。通过初步调整轮式机器人的位置,再通过活动平台的上下调整,使得摄像机能够获取更为精确的图像,由活动平台实现在水平方向上更为精确的调整,有利于提高轮式机器人的定位精度。

相对方位角计算方法和装置、以及相对定位方法.pdf
本发明公开了一种相对方位角计算方法和装置、以及相对定位方法。该相对方位角计算方法包括:获得第一和第二移动设备的惯性传感器数据,其中,该第一移动设备能够向该第二移动设备发送第一信号;获得该第一移动设备在向该第二移动设备发送该第一信号时、该第一信号具有的发送频率;获得该第二移动设备在从该第一移动设备接收该第一信号时、该第一信号具有的接收频率,其中,该第一信号在从该第一到第二移动设备的发送过程中经受多普勒效应的影响;以及根据该惯性传感器数据、该发送频率、和该接收频率来计算该第一和第二移动设备之间的相对方位角。该

机器人视觉定位方法和装置、视觉标定方法和装置.pdf
本发明提出了一种机器人视觉定位方法和装置,该方法包括:获取目标图像,对所述目标图像进行预处理;根据预设的分割参数对图像进行特征分割,对分割后的图像进行滤波处理,对滤波后的图像进行连通域检测提取组成特征标志的亮斑,对提取的亮斑进行过滤处理,判断过滤后的亮斑数目是否符合预设的数目,若否,则重新调整分割参数,进行重新检测,若是,则识别亮斑轮廓线,判断识别出的亮斑轮廓线与预设的模板轮廓线是否匹配,若是,则输出识别出的特征标志。该方法通过自动调整分割参数,使得分割后的轮廓符合初始设置条件,适应光照条件不同的图像检测

一种定位方法、装置及机器人.pdf
本发明实施例公开了一种定位方法、装置及机器人,所述方法在基于以自适应定位算法具有更高置信度的方式确定目标的预测目标位置后,获取所述目标的上一时刻目标位置,响应于所述预测目标位置和所述上一时刻目标位置间的距离差大于跳变阈值,基于以里程计数据具有更高置信度的方式确定所述目标的当前时刻目标位置,通过所述方法可以在检测出定位丢失问题时,及时更正错误的定位信息,以提高定位的准确性和可靠性。