
低慢小无人飞行器目标诱骗干扰效果评估方法.pdf

一吃****仪凡

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
低慢小无人飞行器目标诱骗干扰效果评估方法.pdf
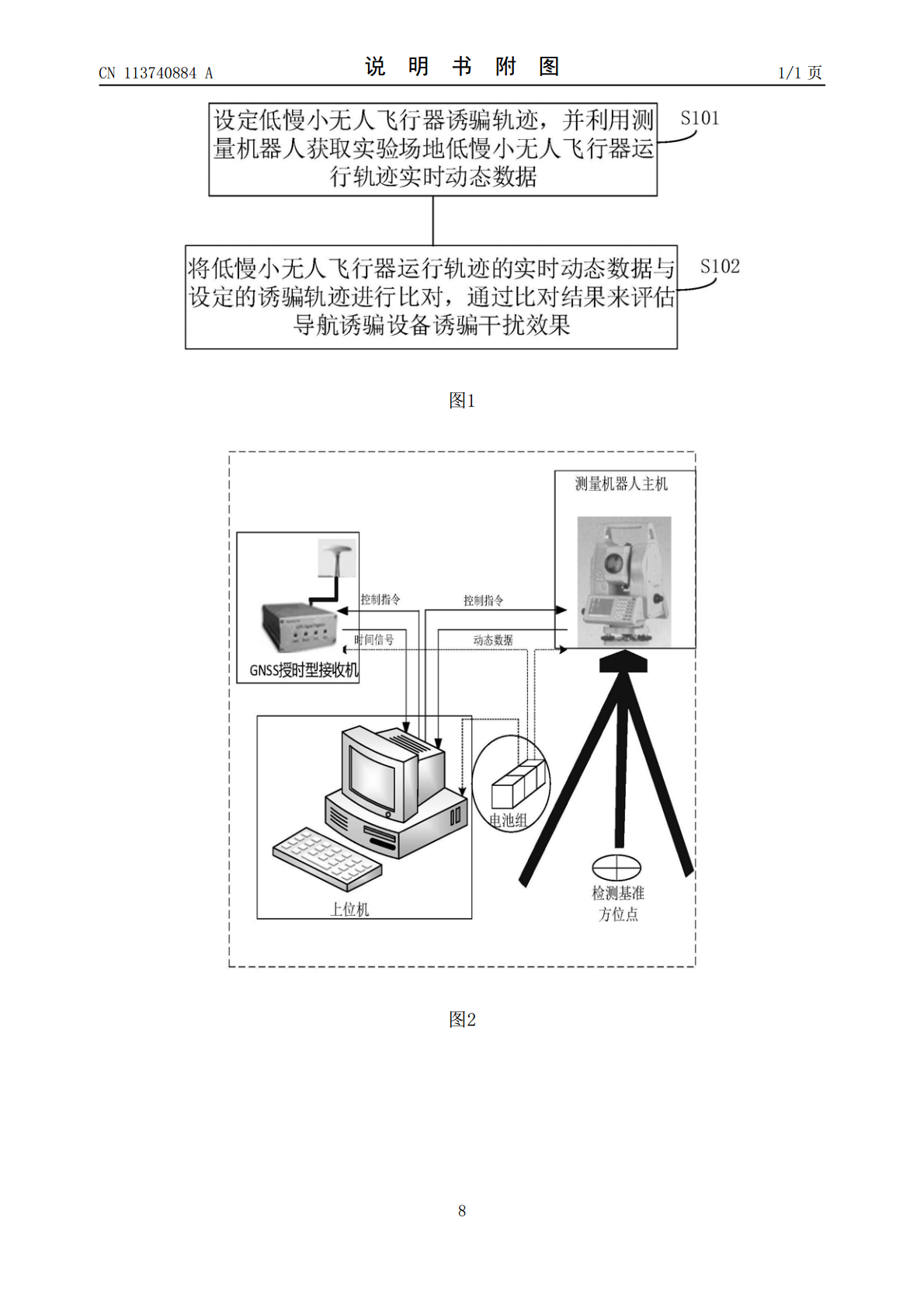
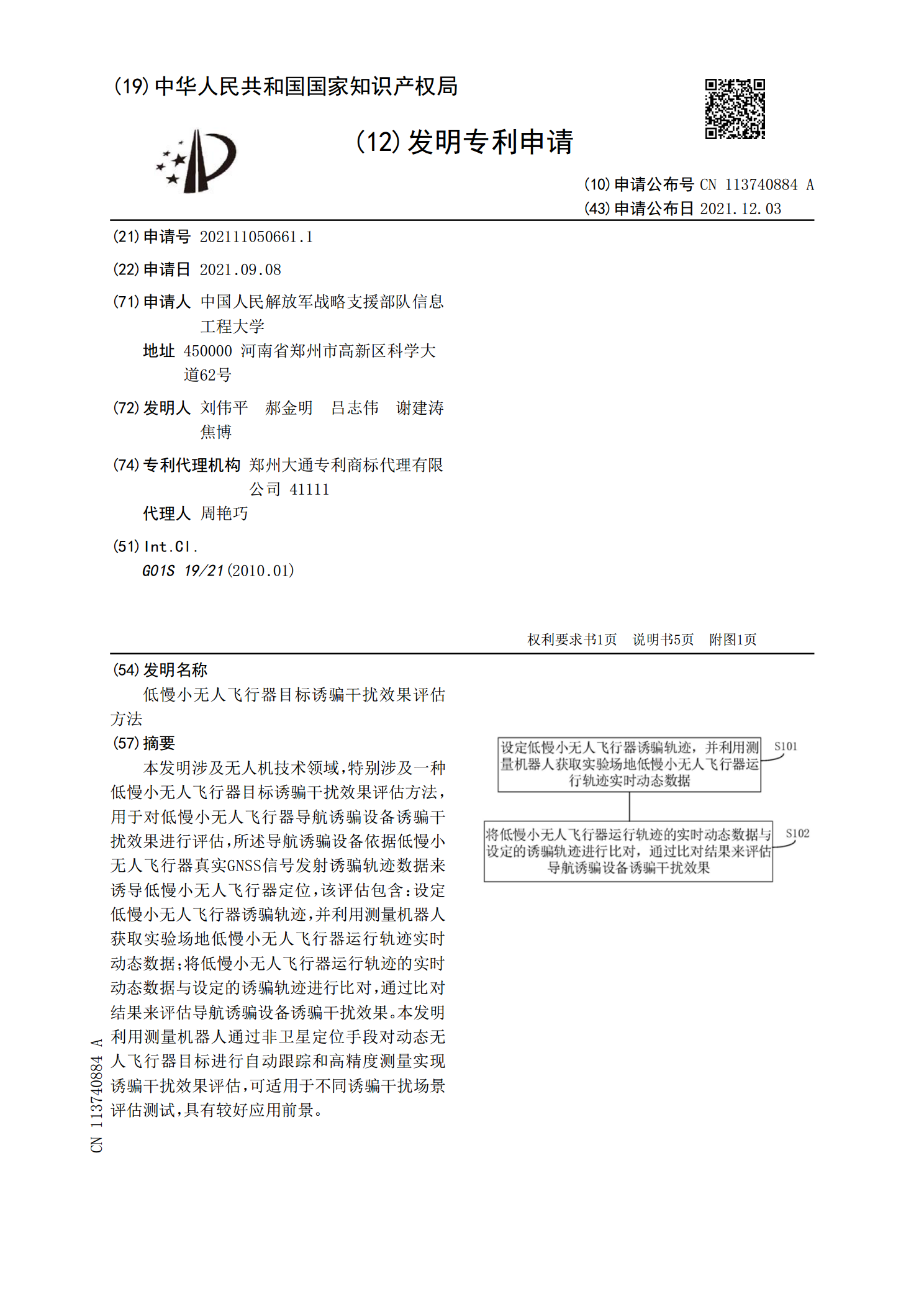
本发明涉及无人机技术领域,特别涉及一种低慢小无人飞行器目标诱骗干扰效果评估方法,用于对低慢小无人飞行器导航诱骗设备诱骗干扰效果进行评估,所述导航诱骗设备依据低慢小无人飞行器真实GNSS信号发射诱骗轨迹数据来诱导低慢小无人飞行器定位,该评估包含:设定低慢小无人飞行器诱骗轨迹,并利用测量机器人获取实验场地低慢小无人飞行器运行轨迹实时动态数据;将低慢小无人飞行器运行轨迹的实时动态数据与设定的诱骗轨迹进行比对,通过比对结果来评估导航诱骗设备诱骗干扰效果。本发明利用测量机器人通过非卫星定位手段对动态无人飞行器目标进

一种对“低慢小”无人飞行器监视的系统及方法.pdf
本发明创造提供了一种对“低慢小”无人飞行器监视的系统及方法,系统包括在设定范围内梯次布置的用于采集目标信息的探测装置、固定设置在空中的留空无人机,留空无人机上设有光电设备以及设置在地面的指挥控制平台;探针装置包括激光测距仪、雷达、光电设备;探测装置、留空无人机均通过无线网络将数据传输至指挥控制平台。本发明创造结合雷达、激光测距仪、光电设备、留空无人机可实现对无人机的自动发现及识别,兼容多种监测手段,并通过无线网络发送到指挥控制平台进行数据分析、处理、存储,解决了单一发现方式发现率低以及容易出现漏警情况的缺

一种“低慢小目标”的威胁评估方法.pdf
本发明涉及一种”低慢小目标”的威胁评估方法,属威胁评估技术领域。通过本发明包括八个步骤,采用包括一致性判决法、聚类法、自适应变权法和TOPSIS法,构建起针对“低慢小目标”的威胁评估体系,提高排序准确性;通过一致性判决法和聚类法优化专家组数据,评估专家认知局限,有效提升专家数据库的准确度和可靠度;通过自适应变权法,弥补专家经验数据的盲区和缺陷,提高排序的鲁棒性;通过TOPSIS法对各评价对象作出逼近理想解排序并准确输出。解决了现有技术无法针对“低慢小目标”与应用背景复杂的特性对其威胁等级正确排序和准确评估
主动诱骗式智能抗干扰方法.pdf
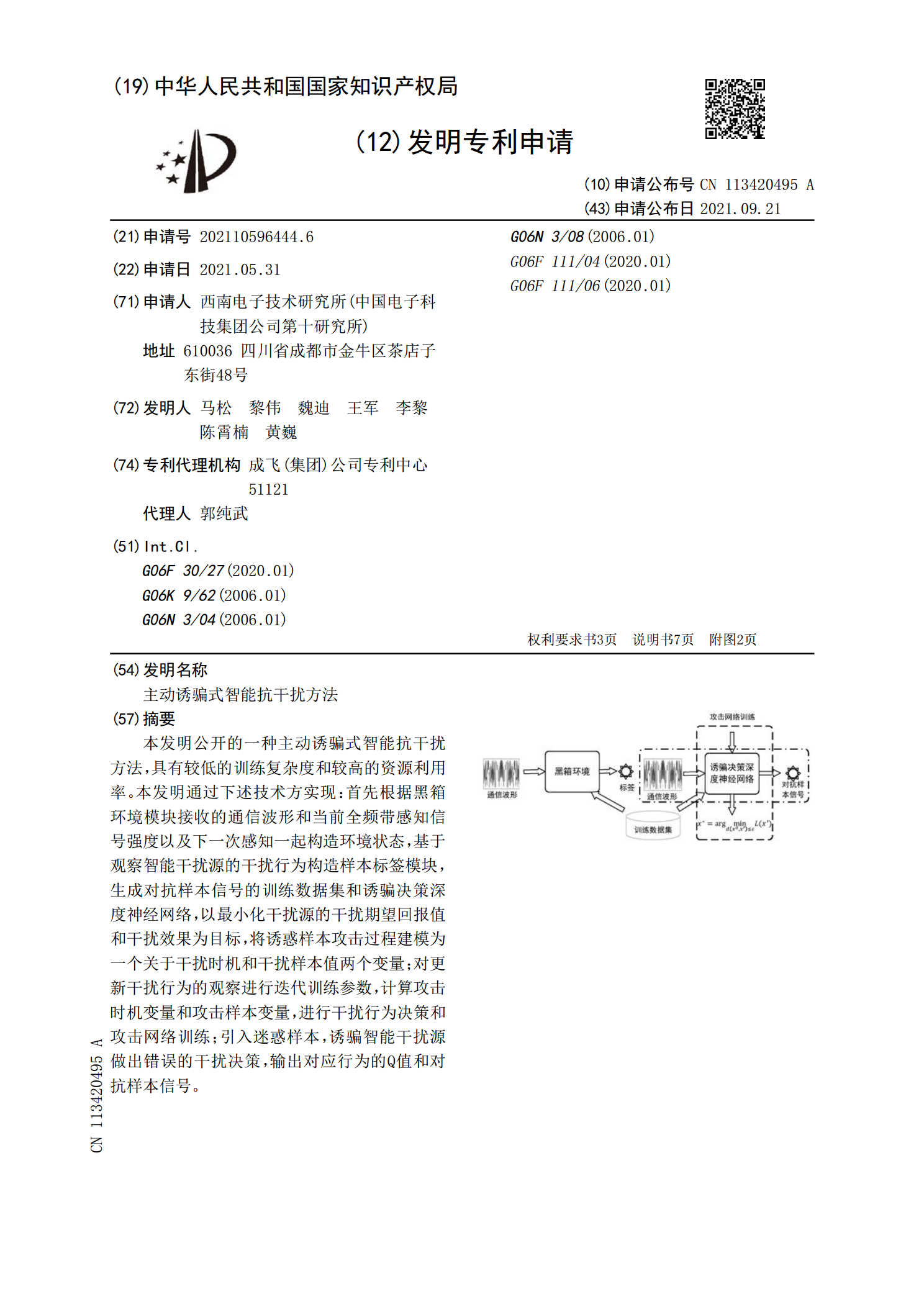
本发明公开的一种主动诱骗式智能抗干扰方法,具有较低的训练复杂度和较高的资源利用率。本发明通过下述技术方实现:首先根据黑箱环境模块接收的通信波形和当前全频带感知信号强度以及下一次感知一起构造环境状态,基于观察智能干扰源的干扰行为构造样本标签模块,生成对抗样本信号的训练数据集和诱骗决策深度神经网络,以最小化干扰源的干扰期望回报值和干扰效果为目标,将诱惑样本攻击过程建模为一个关于干扰时机和干扰样本值两个变量;对更新干扰行为的观察进行迭代训练参数,计算攻击时机变量和攻击样本变量,进行干扰行为决策和攻击网络训练;引
一种多源信息融合低慢小目标探测方法及无人空防系统.pdf
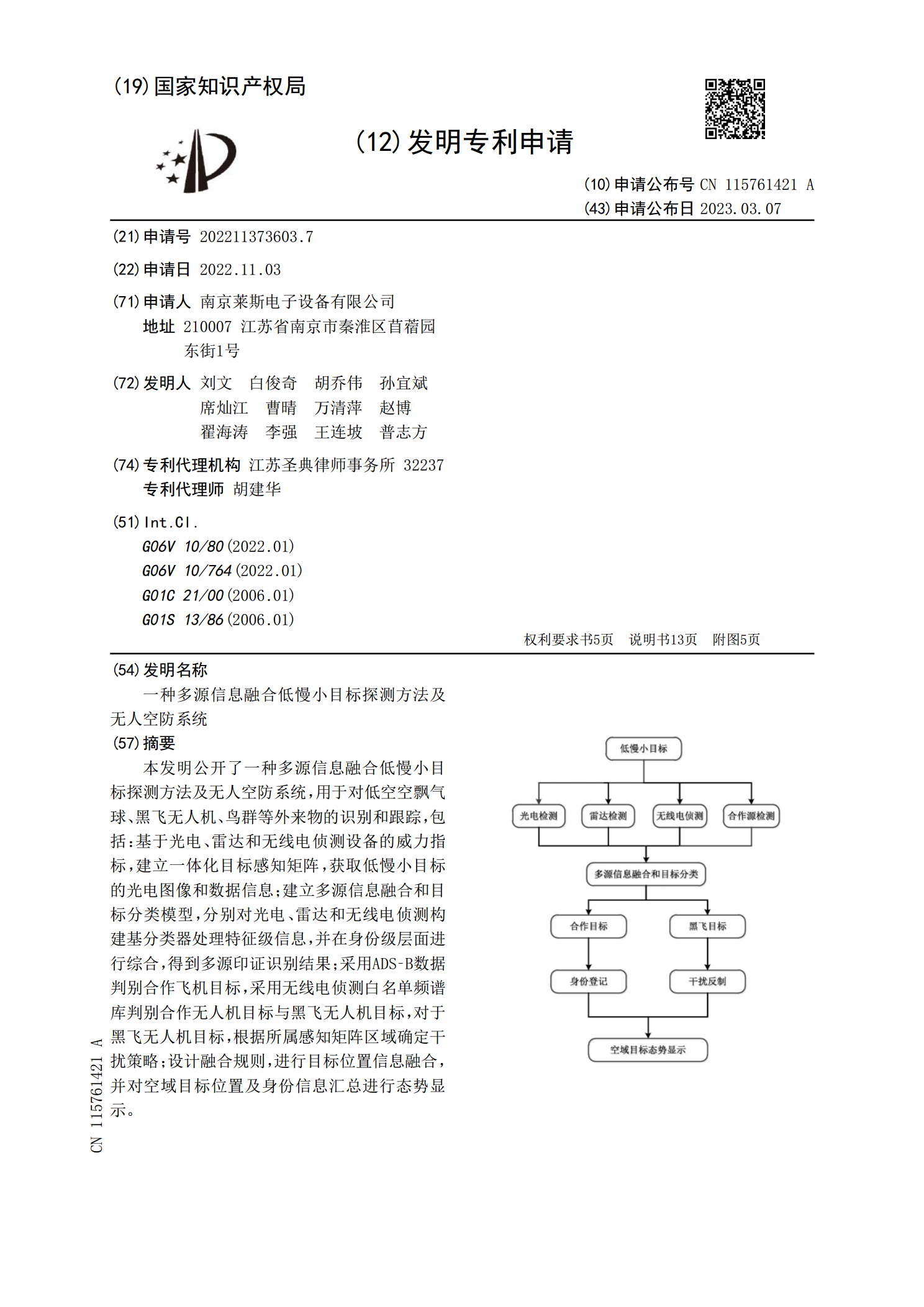
本发明公开了一种多源信息融合低慢小目标探测方法及无人空防系统,用于对低空空飘气球、黑飞无人机、鸟群等外来物的识别和跟踪,包括:基于光电、雷达和无线电侦测设备的威力指标,建立一体化目标感知矩阵,获取低慢小目标的光电图像和数据信息;建立多源信息融合和目标分类模型,分别对光电、雷达和无线电侦测构建基分类器处理特征级信息,并在身份级层面进行综合,得到多源印证识别结果;采用ADS‑B数据判别合作飞机目标,采用无线电侦测白名单频谱库判别合作无人机目标与黑飞无人机目标,对于黑飞无人机目标,根据所属感知矩阵区域确定干扰策