
一种多源信息融合低慢小目标探测方法及无人空防系统.pdf

悠柔****找我


1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多源信息融合低慢小目标探测方法及无人空防系统.pdf
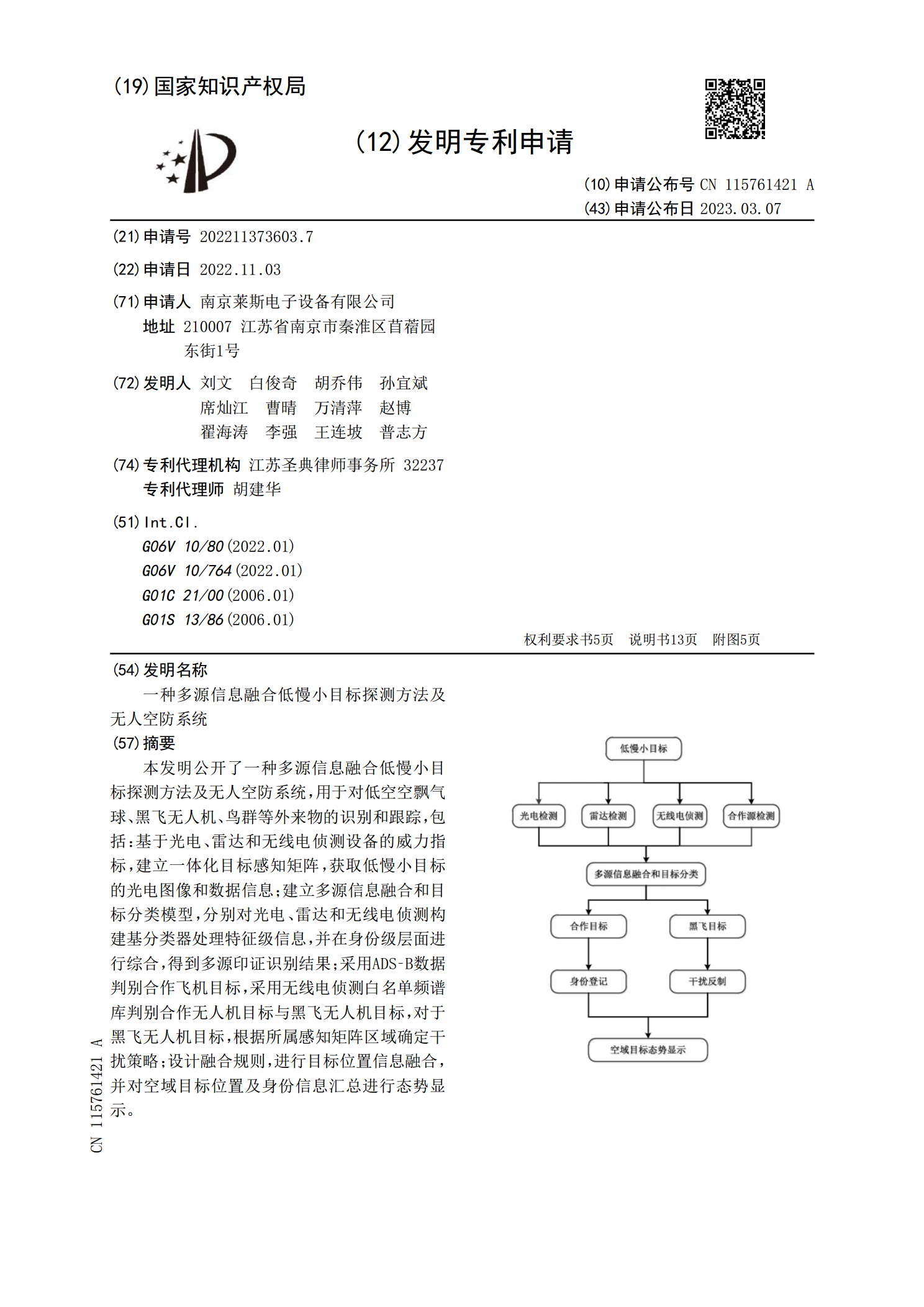
本发明公开了一种多源信息融合低慢小目标探测方法及无人空防系统,用于对低空空飘气球、黑飞无人机、鸟群等外来物的识别和跟踪,包括:基于光电、雷达和无线电侦测设备的威力指标,建立一体化目标感知矩阵,获取低慢小目标的光电图像和数据信息;建立多源信息融合和目标分类模型,分别对光电、雷达和无线电侦测构建基分类器处理特征级信息,并在身份级层面进行综合,得到多源印证识别结果;采用ADS‑B数据判别合作飞机目标,采用无线电侦测白名单频谱库判别合作无人机目标与黑飞无人机目标,对于黑飞无人机目标,根据所属感知矩阵区域确定干扰策

一种移动平台高精度低慢小目标探测识别系统及方法.pdf
本发明公开了一种高精度低慢小目标探测识别系统及方法,该系统配置在移动平台上,包括目标探测单元、支撑架、控制单元以及电源装置;所述目标探测单元包括:相控阵雷达,用于对远距离低慢小目标进行探测;以及光学成像模块,用于对雷达探测到的嫌疑目标进行高分辨率成像;所述支撑架包括一固定支架,所述相控阵雷达固定设置在该固定支架上,所述光学成像模块通过一运动支架设置在该固定支架上,使得该光学成像模块能够相对该固定支架进行俯仰摆动。该系统具有灵活机动、探测精度高、实时性好的特点。

一种对“低慢小”无人飞行器监视的系统及方法.pdf
本发明创造提供了一种对“低慢小”无人飞行器监视的系统及方法,系统包括在设定范围内梯次布置的用于采集目标信息的探测装置、固定设置在空中的留空无人机,留空无人机上设有光电设备以及设置在地面的指挥控制平台;探针装置包括激光测距仪、雷达、光电设备;探测装置、留空无人机均通过无线网络将数据传输至指挥控制平台。本发明创造结合雷达、激光测距仪、光电设备、留空无人机可实现对无人机的自动发现及识别,兼容多种监测手段,并通过无线网络发送到指挥控制平台进行数据分析、处理、存储,解决了单一发现方式发现率低以及容易出现漏警情况的缺

基于移动通信设施的低慢小目标探测系统.docx
基于移动通信设施的低慢小目标探测系统基于移动通信设施的低慢小目标探测系统摘要:随着移动通信设施的快速发展,无线通信网络拥有广阔的覆盖范围和大量的基站设备。这些设施的潜在用途不仅仅限于通信,还可以在目标探测和定位方面发挥重要作用。本论文将介绍一种基于移动通信设施的低慢小目标探测系统。引言:低慢小目标指的是移动速度较慢、体积较小和高度较低的目标物体,如行人、自行车、摩托车等。传统的目标探测系统通常依赖于雷达、红外相机等传感器设备,而这些设备的安装和维护成本很高。而基于移动通信设施的目标探测系统可以通过利用已有
一种大视场中搜索和跟踪低小慢目标的探测系统及方法.pdf
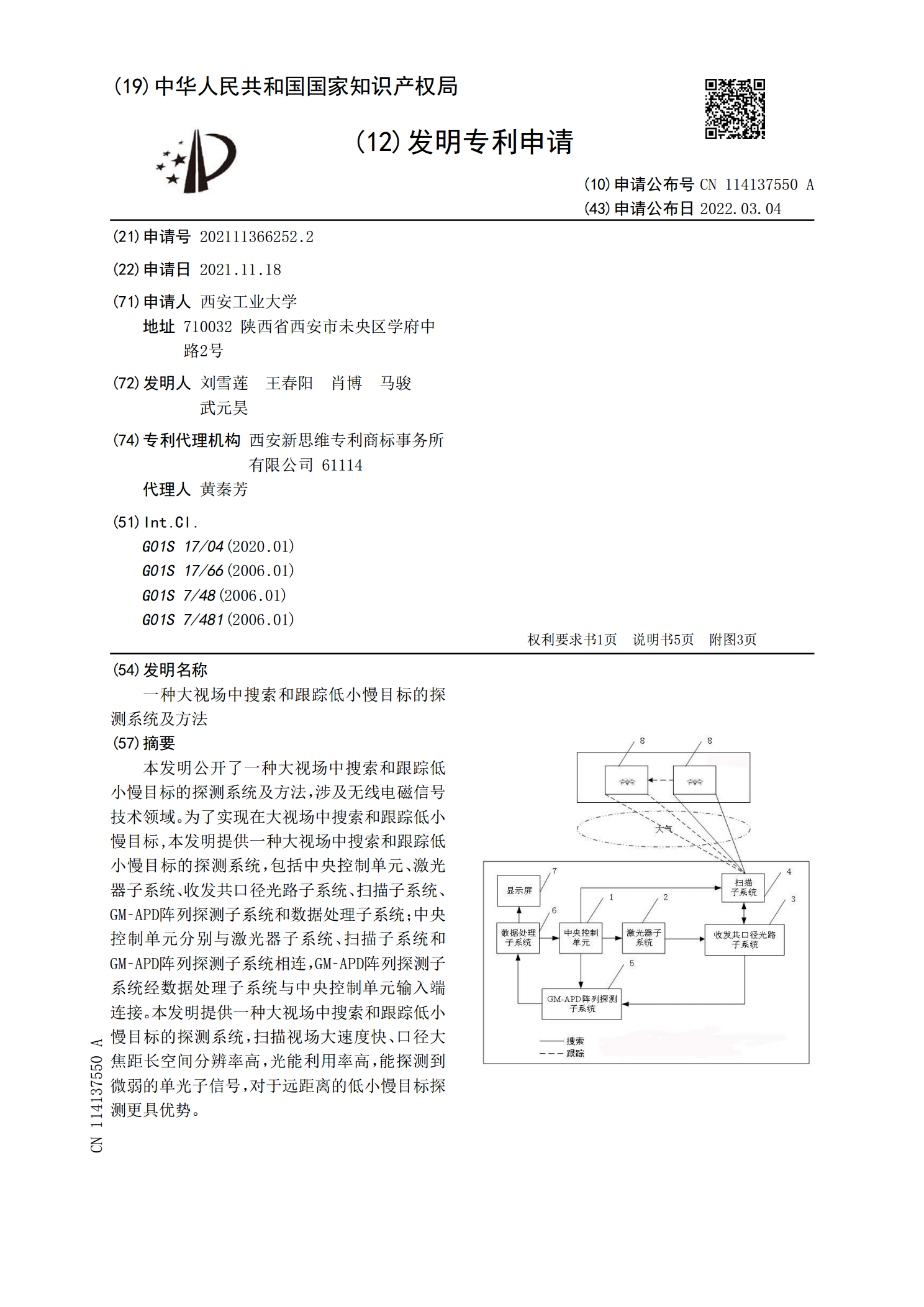
本发明公开了一种大视场中搜索和跟踪低小慢目标的探测系统及方法,涉及无线电磁信号技术领域。为了实现在大视场中搜索和跟踪低小慢目标,本发明提供一种大视场中搜索和跟踪低小慢目标的探测系统,包括中央控制单元、激光器子系统、收发共口径光路子系统、扫描子系统、GM‑APD阵列探测子系统和数据处理子系统;中央控制单元分别与激光器子系统、扫描子系统和GM‑APD阵列探测子系统相连,GM‑APD阵列探测子系统经数据处理子系统与中央控制单元输入端连接。本发明提供一种大视场中搜索和跟踪低小慢目标的探测系统,扫描视场大速度快、口