
电动助力转向控制方法、电动助力转向系统及存储介质.pdf

冷霜****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动助力转向控制方法、电动助力转向系统及存储介质.pdf
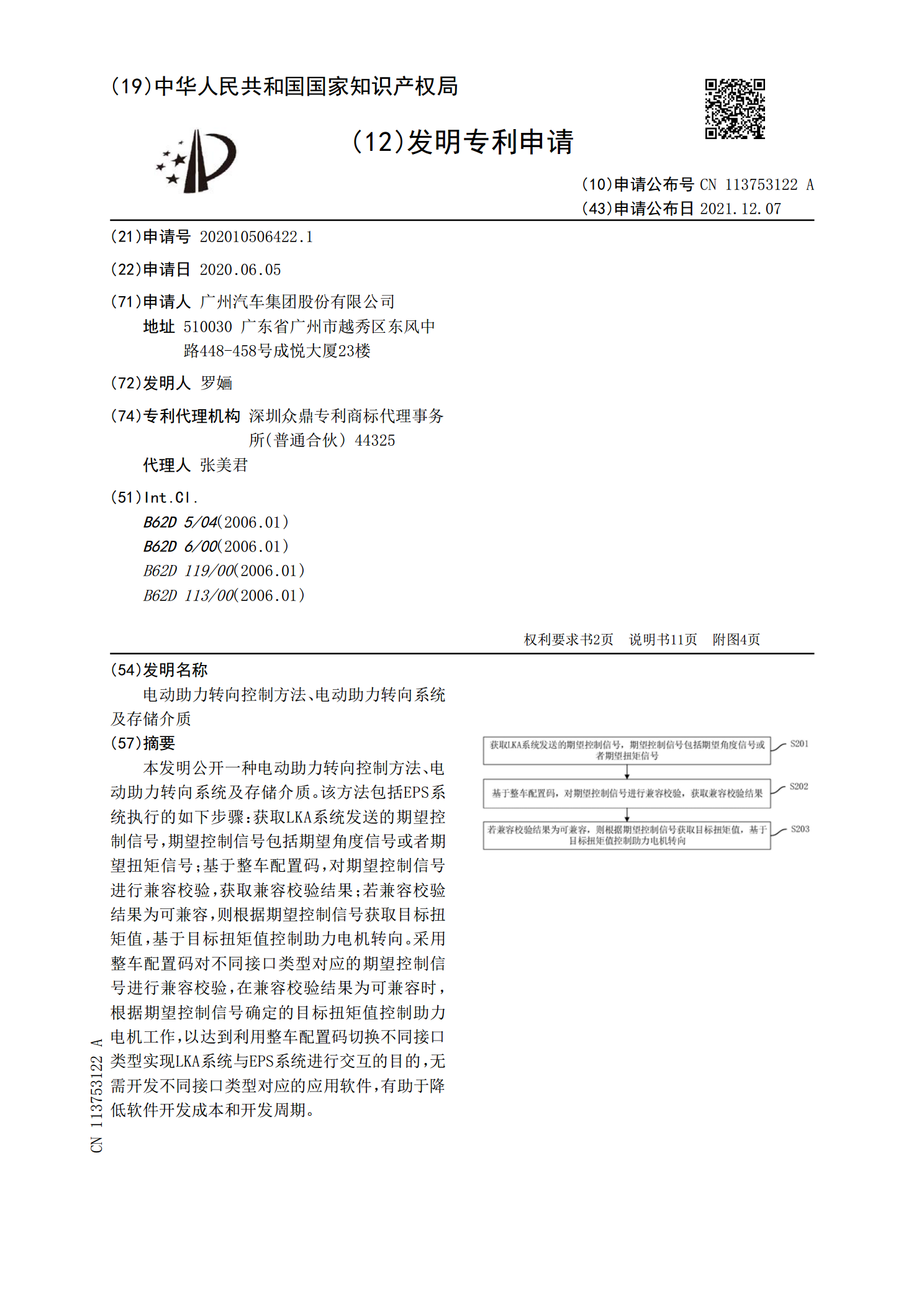
本发明公开一种电动助力转向控制方法、电动助力转向系统及存储介质。该方法包括EPS系统执行的如下步骤:获取LKA系统发送的期望控制信号,期望控制信号包括期望角度信号或者期望扭矩信号;基于整车配置码,对期望控制信号进行兼容校验,获取兼容校验结果;若兼容校验结果为可兼容,则根据期望控制信号获取目标扭矩值,基于目标扭矩值控制助力电机转向。采用整车配置码对不同接口类型对应的期望控制信号进行兼容校验,在兼容校验结果为可兼容时,根据期望控制信号确定的目标扭矩值控制助力电机工作,以达到利用整车配置码切换不同接口类型实现L

电动助力转向系统的控制方法、装置、设备和存储介质.pdf
本发明实施例公开了一种电动助力转向系统的控制方法、装置、设备和存储介质,该电动助力转向系统的控制方法包括:确定稳定性补偿控制器传递函数;根据稳定性补偿控制器传递函数和电动助力转向系统的开环传递函数,确定电动助力转向系统的频率特性。本发明实施例利用稳定性补偿控制器传递函数和电动助力转向系统的开环传递函数,确定电动助力转向系统的频率特性,改变了系统幅值裕度和相位裕度的大小,解决了电动助力转向系统稳定性差的问题,实现了提升电动助力转向系统的稳定性的目的,从而减少转向过程中的手力脉动及方向盘抖动,使得驾驶员的驾驶
电动汽车电动助力转向系统及其转向助力方法.pdf
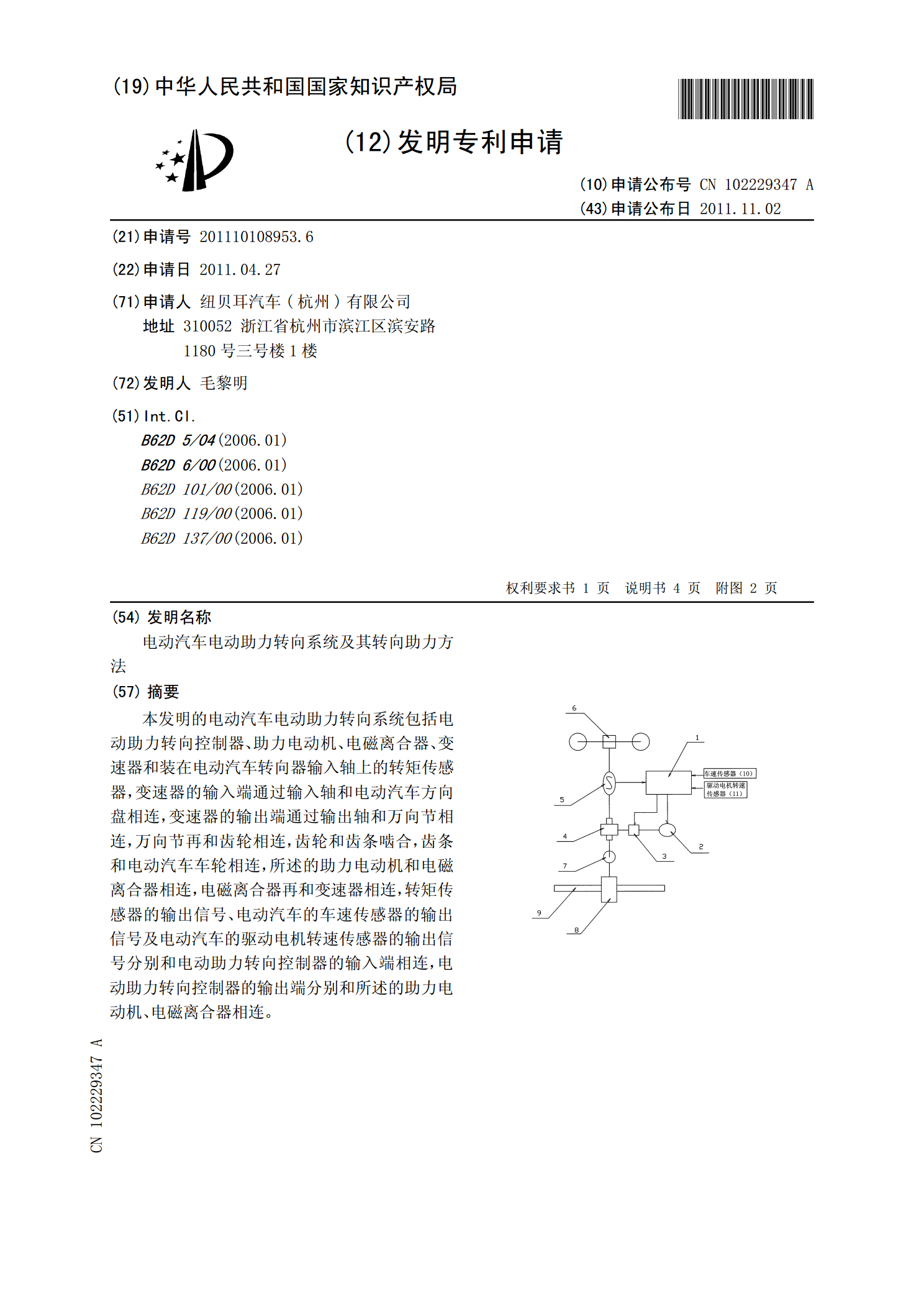
本发明的电动汽车电动助力转向系统包括电动助力转向控制器、助力电动机、电磁离合器、变速器和装在电动汽车转向器输入轴上的转矩传感器,变速器的输入端通过输入轴和电动汽车方向盘相连,变速器的输出端通过输出轴和万向节相连,万向节再和齿轮相连,齿轮和齿条啮合,齿条和电动汽车车轮相连,所述的助力电动机和电磁离合器相连,电磁离合器再和变速器相连,转矩传感器的输出信号、电动汽车的车速传感器的输出信号及电动汽车的驱动电机转速传感器的输出信号分别和电动助力转向控制器的输入端相连,电动助力转向控制器的输出端分别和所述的助力电动机
电动助力转向系统修复方法、装置、存储介质及车辆.pdf
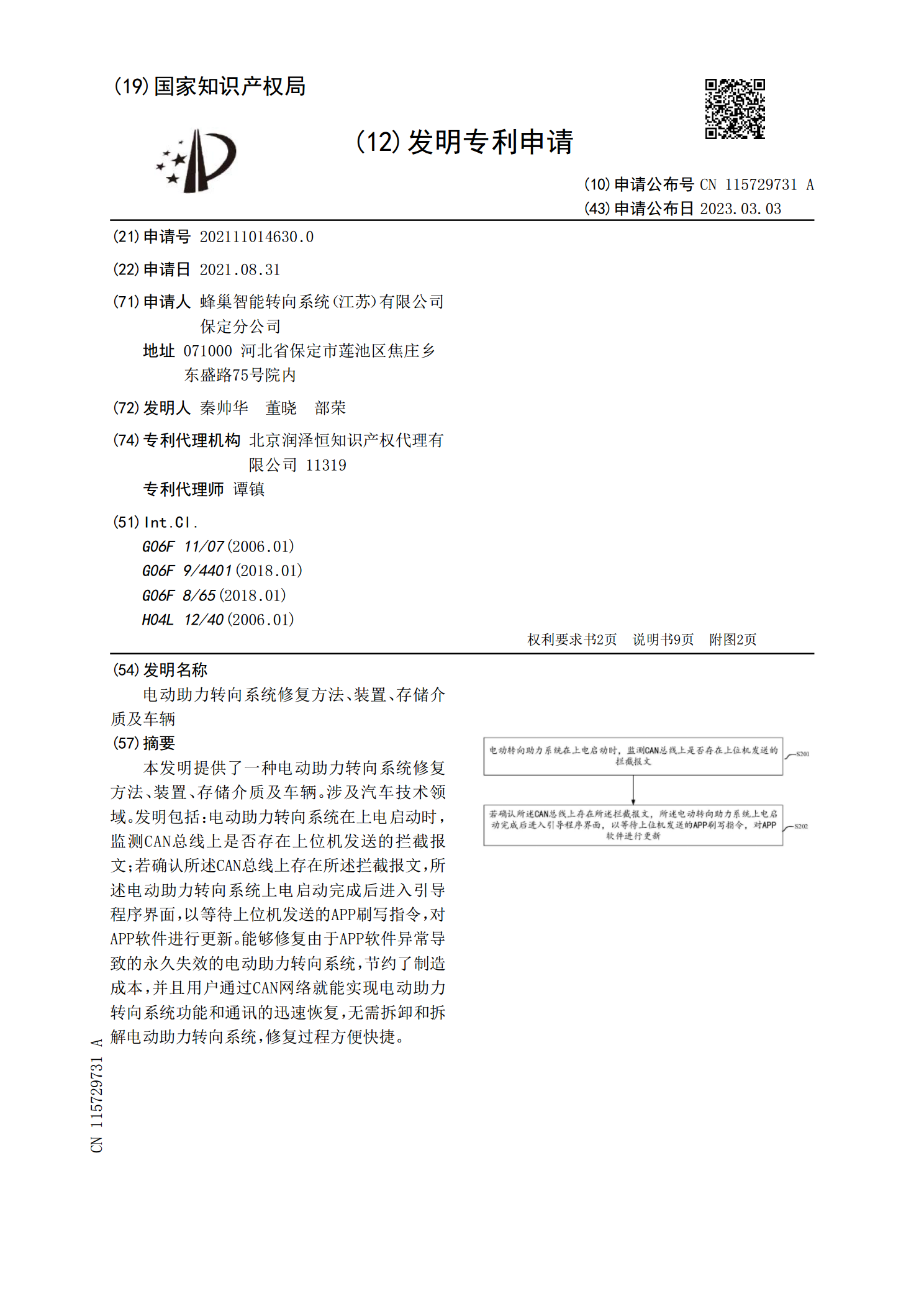
本发明提供了一种电动助力转向系统修复方法、装置、存储介质及车辆。涉及汽车技术领域。发明包括:电动助力转向系统在上电启动时,监测CAN总线上是否存在上位机发送的拦截报文;若确认所述CAN总线上存在所述拦截报文,所述电动助力转向系统上电启动完成后进入引导程序界面,以等待上位机发送的APP刷写指令,对APP软件进行更新。能够修复由于APP软件异常导致的永久失效的电动助力转向系统,节约了制造成本,并且用户通过CAN网络就能实现电动助力转向系统功能和通讯的迅速恢复,无需拆卸和拆解电动助力转向系统,修复过程方便快捷。

主动转向干预下电动助力转向系统的助力电机控制方法.pdf
本发明公开了一种主动转向干预下电动助力转向系统的助力电机控制方法,属于融合主动转向功能的电动助力转向系统的助力电机控制领域。该方法利用前馈助力修正控制模块(7)根据附加转角θac和前馈传递函数GΔI(s)计算所需要的前馈助力修正控制电流信号ΔIa,该修正控制电流信号ΔIa再与常规助力控制电流信号Ia进行线性叠加,得到助力电机总控制电流信号控制助力电机施加助力力矩Ta,助力力矩Ta与驾驶员施加的转向盘转矩Td共同克服转向阻力矩TR,通过转向传动机构(10)驱动车轮完成转向。本方法可以解决高速行驶下伴随主动转