
主动转向干预下电动助力转向系统的助力电机控制方法.pdf

骊英****bb


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

主动转向干预下电动助力转向系统的助力电机控制方法.pdf
本发明公开了一种主动转向干预下电动助力转向系统的助力电机控制方法,属于融合主动转向功能的电动助力转向系统的助力电机控制领域。该方法利用前馈助力修正控制模块(7)根据附加转角θac和前馈传递函数GΔI(s)计算所需要的前馈助力修正控制电流信号ΔIa,该修正控制电流信号ΔIa再与常规助力控制电流信号Ia进行线性叠加,得到助力电机总控制电流信号控制助力电机施加助力力矩Ta,助力力矩Ta与驾驶员施加的转向盘转矩Td共同克服转向阻力矩TR,通过转向传动机构(10)驱动车轮完成转向。本方法可以解决高速行驶下伴随主动转

融合电动助力转向功能的主动转向系统及控制方法.pdf
一种融合电动助力转向功能的主动转向系统及控制方法,属于汽车转向系统领域,该系统依次包括转向盘、转向输入轴、行星齿轮机构、转向输出轴、转向机、转向横拉杆、转向电机、转向盘转角传感器、横摆角速度传感器、侧向加速度传感器,以及实施主动转向控制的ECU;特征在于:该系统还包括:安装于上述转向输入轴上的转向盘转矩传感器、与转向机小齿轮相连的涡轮蜗杆减速机构、与该涡轮蜗杆减速机构相连的助力电机;上述ECU还接收转向盘转矩传感器测得转向盘转矩信号和CAN总线获得的车速信号,进行转向系统助力和回正控制,实施电动助力转向功
电动助力转向控制方法、电动助力转向系统及存储介质.pdf
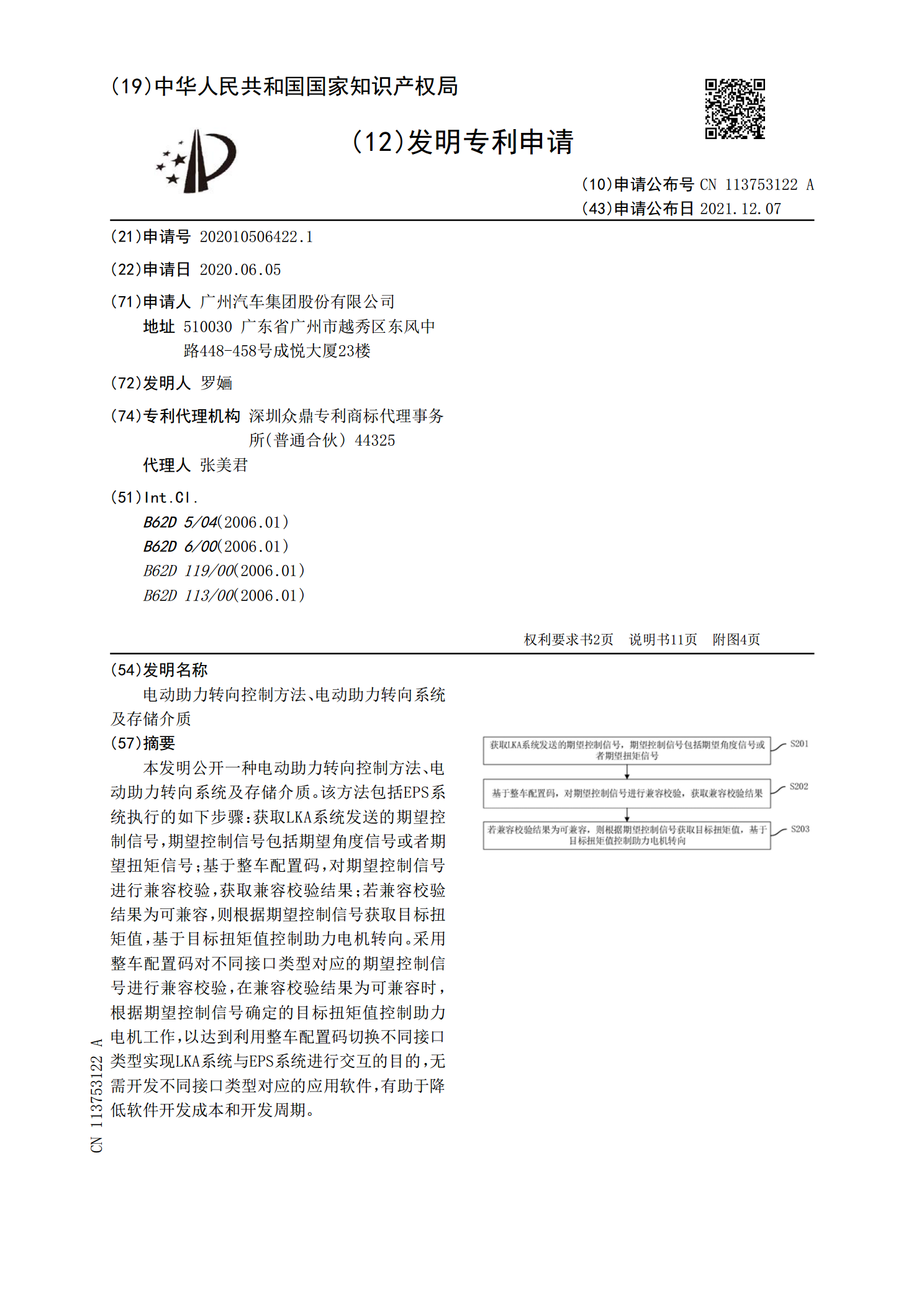
本发明公开一种电动助力转向控制方法、电动助力转向系统及存储介质。该方法包括EPS系统执行的如下步骤:获取LKA系统发送的期望控制信号,期望控制信号包括期望角度信号或者期望扭矩信号;基于整车配置码,对期望控制信号进行兼容校验,获取兼容校验结果;若兼容校验结果为可兼容,则根据期望控制信号获取目标扭矩值,基于目标扭矩值控制助力电机转向。采用整车配置码对不同接口类型对应的期望控制信号进行兼容校验,在兼容校验结果为可兼容时,根据期望控制信号确定的目标扭矩值控制助力电机工作,以达到利用整车配置码切换不同接口类型实现L

融合电动助力转向的主动转向系统.pdf
本发明涉及一种融合电动助力转向的主动转向系统,首先提供了一种新型的双行星轮传动机构,以机械转向系统为基础,在转向轴上设置有融合电动助力转向的主动转向机构,它由双行星轮传动机构、状态切换机构、电动机及其执行机构、电子控制单元、信号传感器与若干信号线组成,能够根据驾驶员操作指令或电子控制单元的操作指令,自动的切换助力或主动转向状态,控制电动机在低速行驶时提供助力,中高速行驶时提供助转角改变转向系统传动比,实现低速转向轻便灵活、高速简单稳定的驾驶特性,其具有机构简单、可靠、易于控制等优点。
电动汽车电动助力转向系统及其转向助力方法.pdf
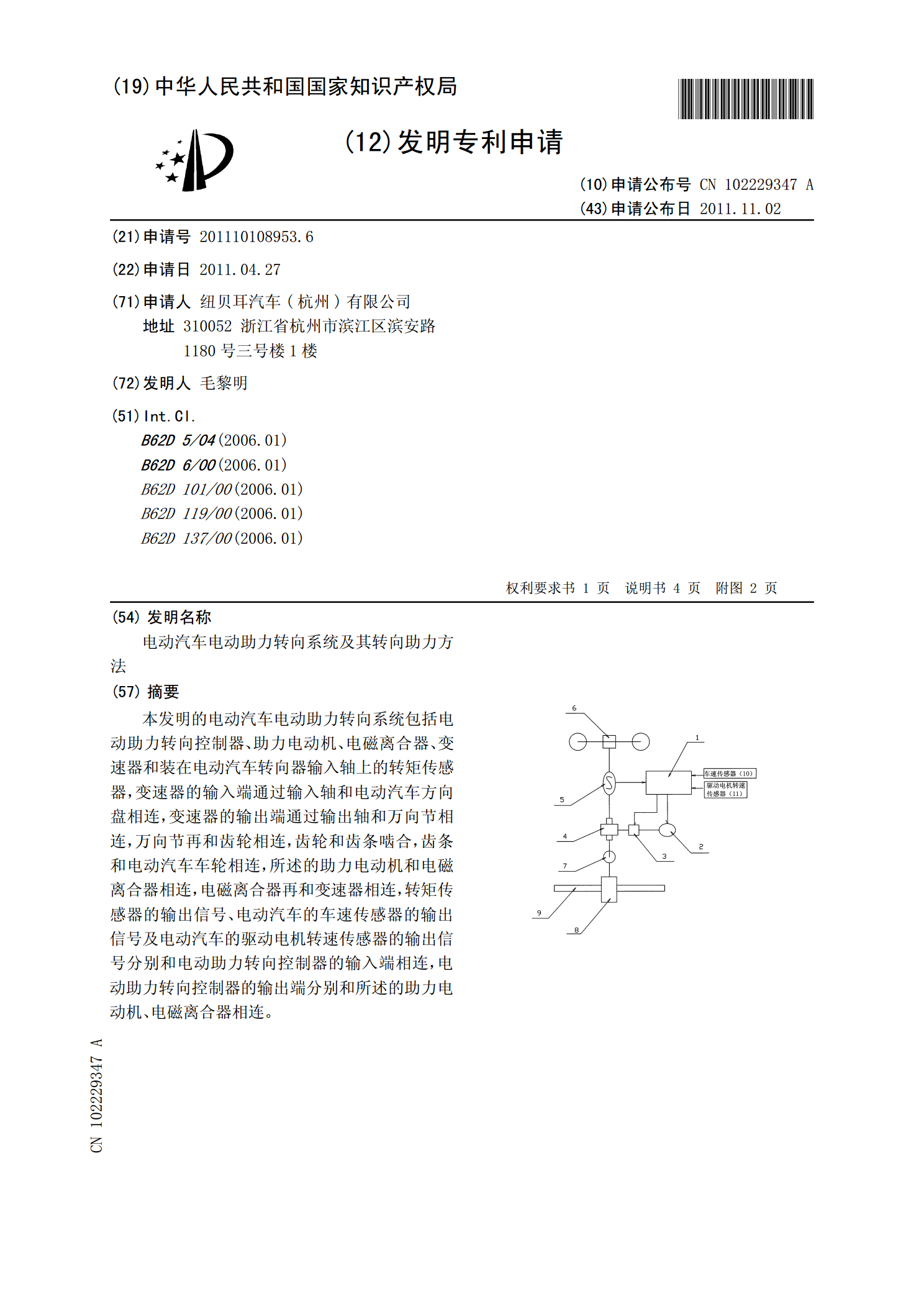
本发明的电动汽车电动助力转向系统包括电动助力转向控制器、助力电动机、电磁离合器、变速器和装在电动汽车转向器输入轴上的转矩传感器,变速器的输入端通过输入轴和电动汽车方向盘相连,变速器的输出端通过输出轴和万向节相连,万向节再和齿轮相连,齿轮和齿条啮合,齿条和电动汽车车轮相连,所述的助力电动机和电磁离合器相连,电磁离合器再和变速器相连,转矩传感器的输出信号、电动汽车的车速传感器的输出信号及电动汽车的驱动电机转速传感器的输出信号分别和电动助力转向控制器的输入端相连,电动助力转向控制器的输出端分别和所述的助力电动机