
用于控制电动车辆运动的装置和方法.pdf

邻家****ng

1/10
2/10
3/10
4/10
5/10
6/10
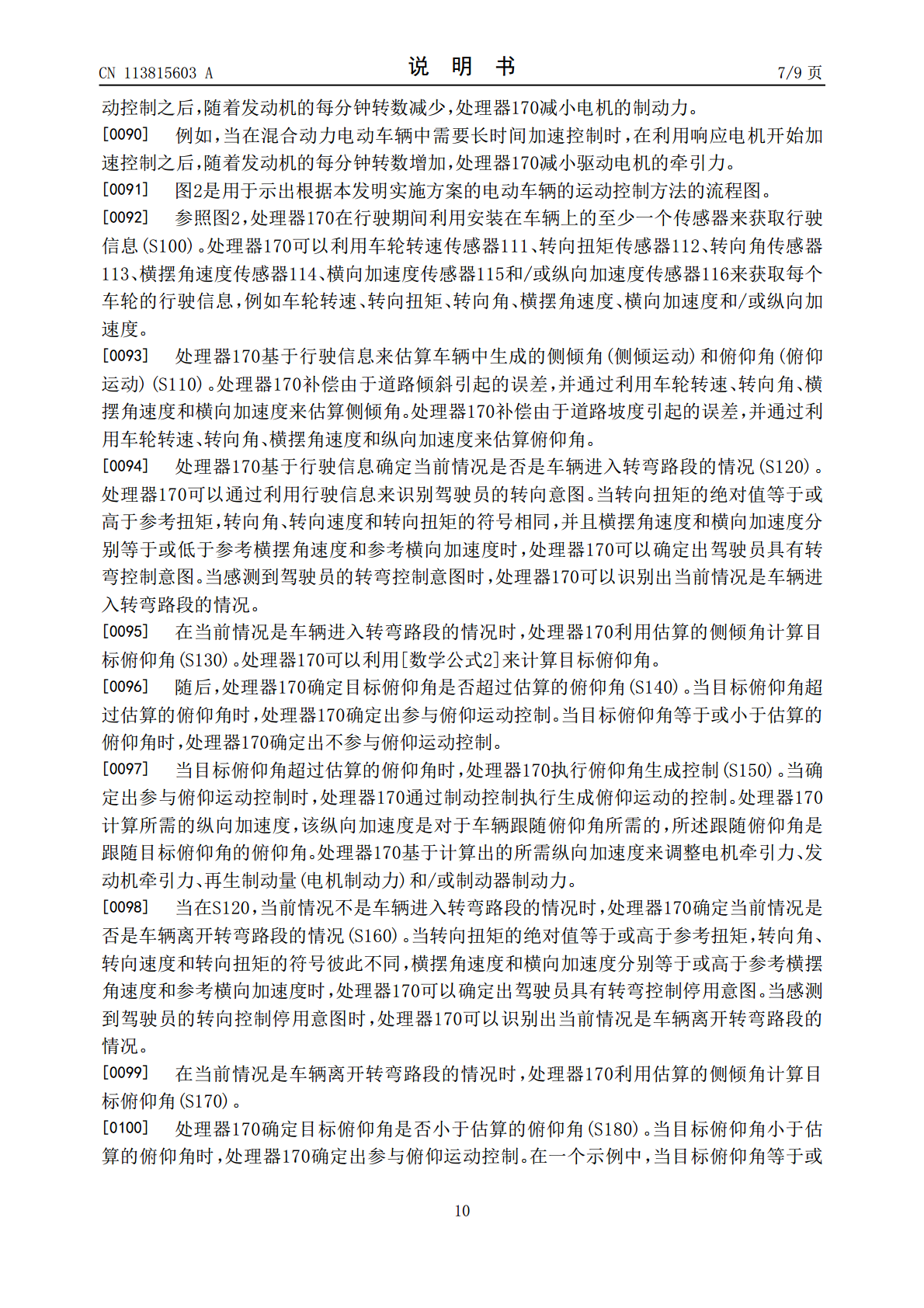
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于控制电动车辆运动的装置和方法.pdf
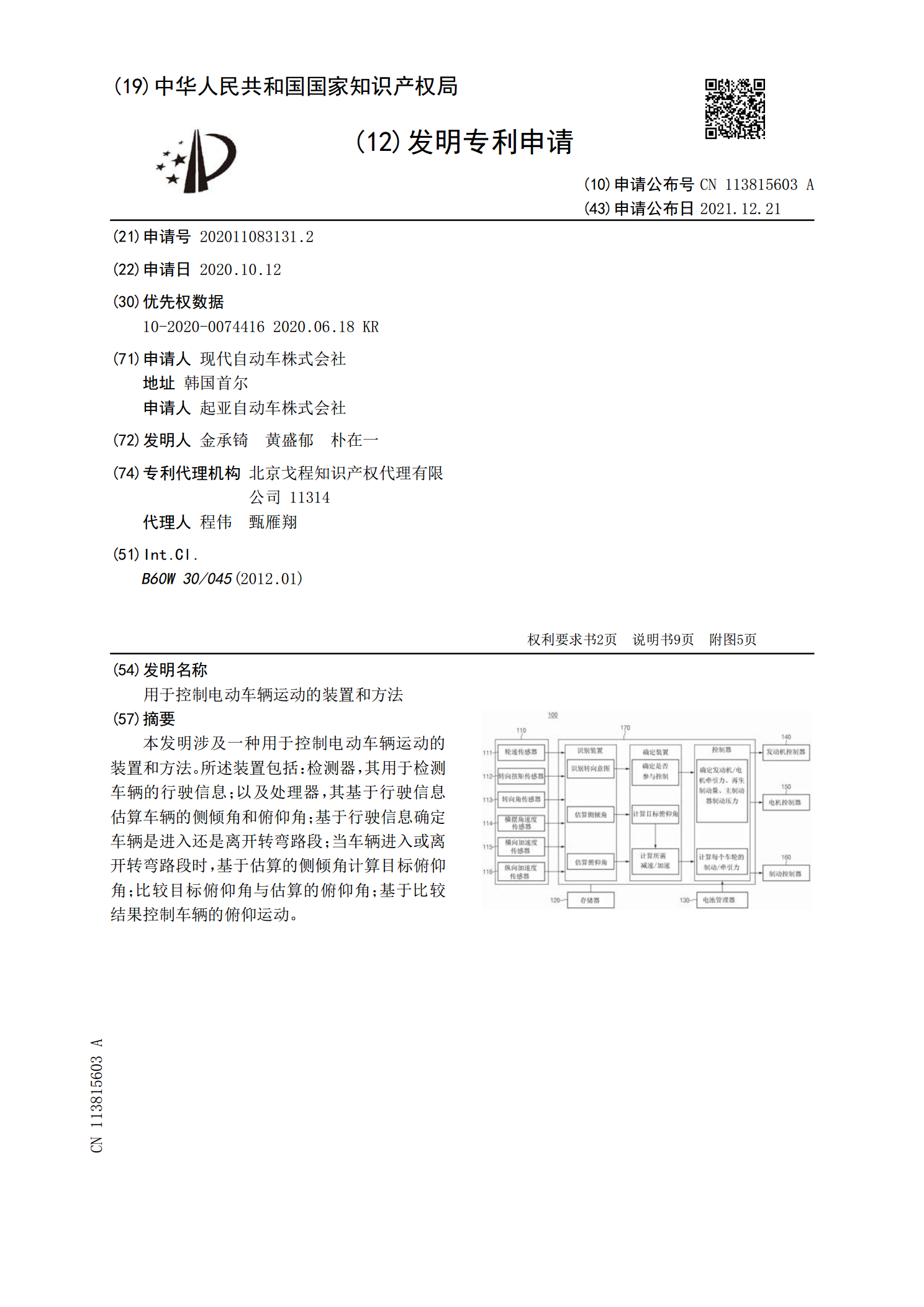
本发明涉及一种用于控制电动车辆运动的装置和方法。所述装置包括:检测器,其用于检测车辆的行驶信息;以及处理器,其基于行驶信息估算车辆的侧倾角和俯仰角;基于行驶信息确定车辆是进入还是离开转弯路段;当车辆进入或离开转弯路段时,基于估算的侧倾角计算目标俯仰角;比较目标俯仰角与估算的俯仰角;基于比较结果控制车辆的俯仰运动。
用于控制具有电动机的车辆的装置和方法.pdf
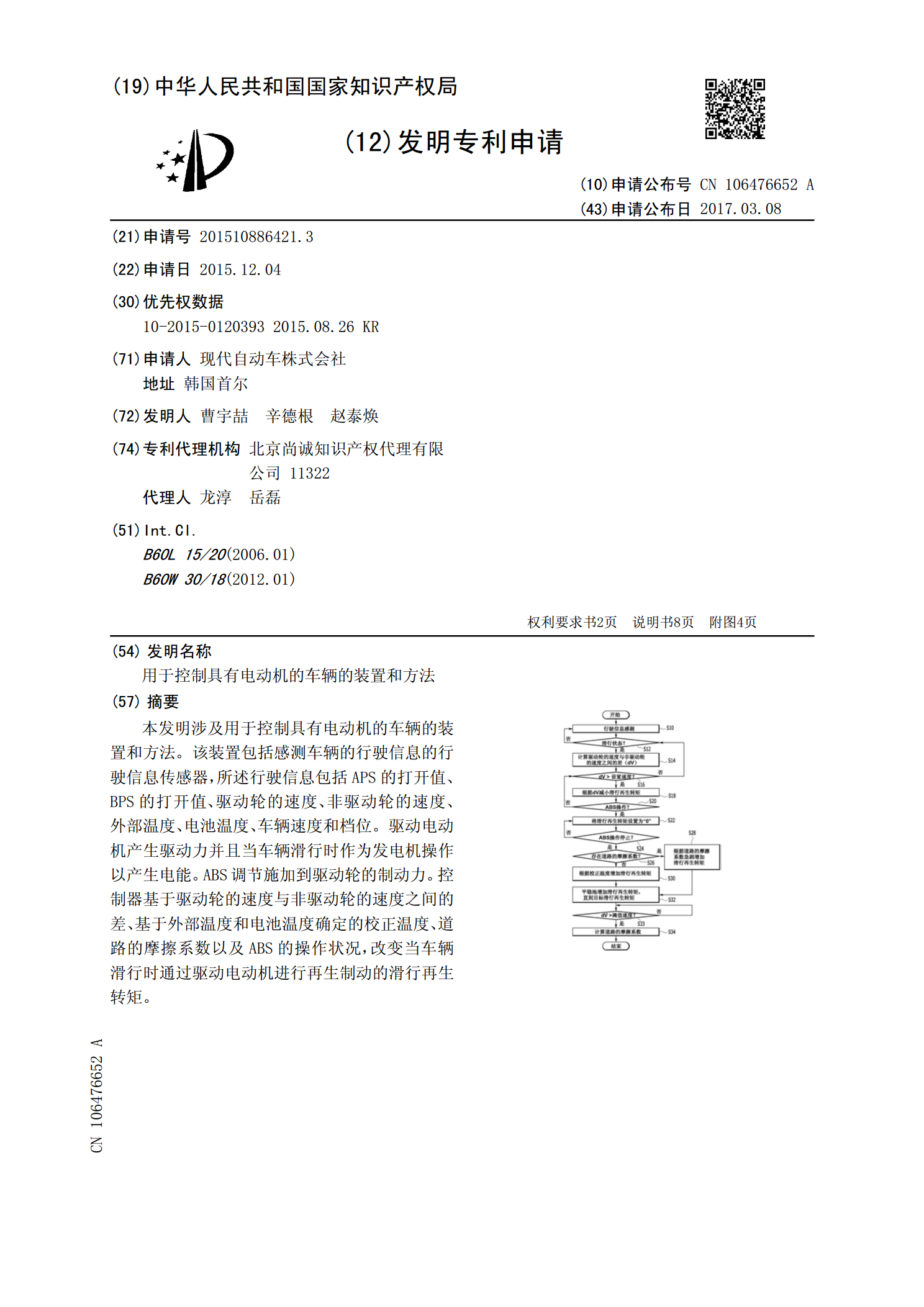
本发明涉及用于控制具有电动机的车辆的装置和方法。该装置包括感测车辆的行驶信息的行驶信息传感器,所述行驶信息包括APS的打开值、BPS的打开值、驱动轮的速度、非驱动轮的速度、外部温度、电池温度、车辆速度和档位。驱动电动机产生驱动力并且当车辆滑行时作为发电机操作以产生电能。ABS调节施加到驱动轮的制动力。控制器基于驱动轮的速度与非驱动轮的速度之间的差、基于外部温度和电池温度确定的校正温度、道路的摩擦系数以及ABS的操作状况,改变当车辆滑行时通过驱动电动机进行再生制动的滑行再生转矩。
用于电动车辆的电池控制装置、方法、电动车辆.pdf
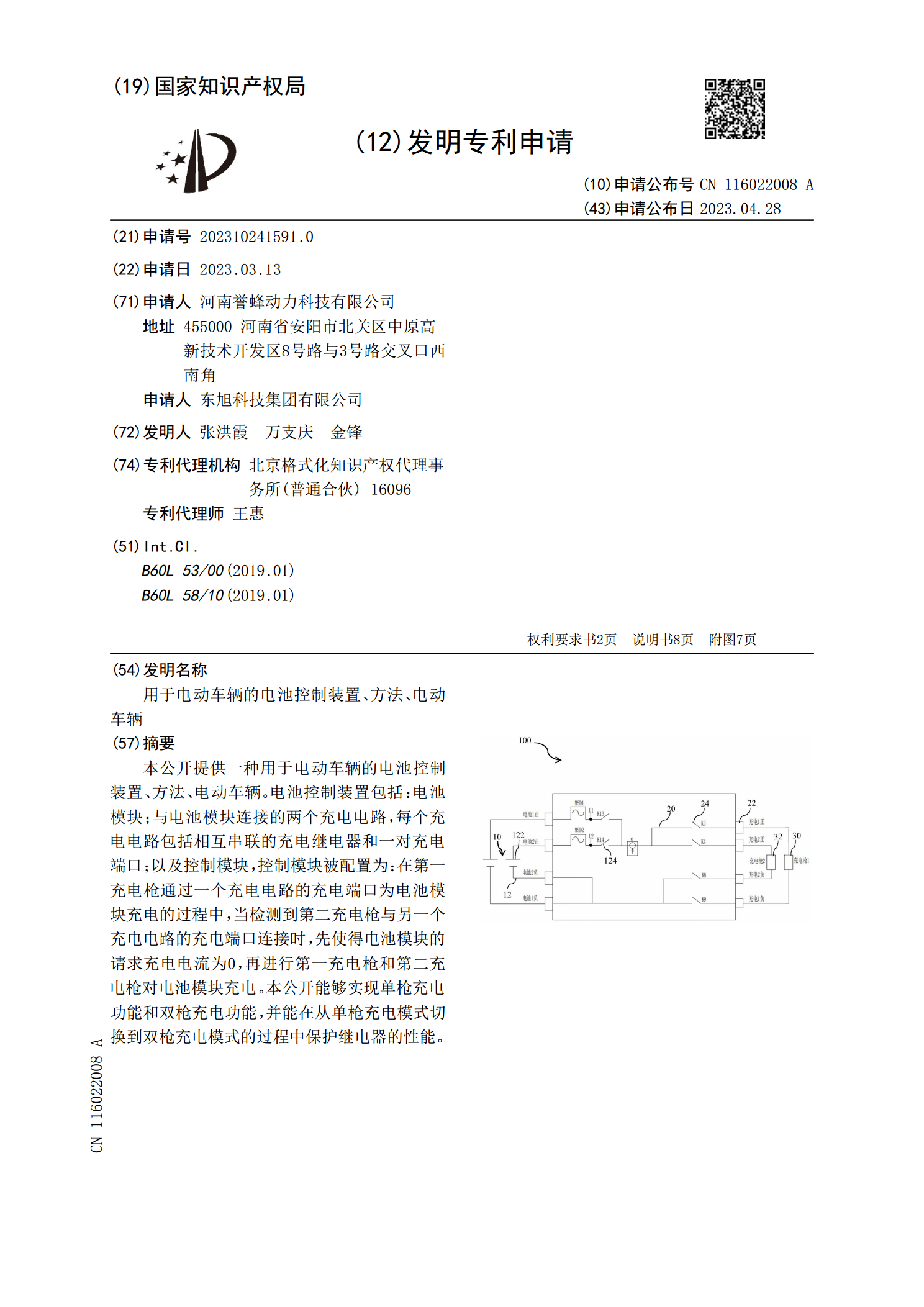
本公开提供一种用于电动车辆的电池控制装置、方法、电动车辆。电池控制装置包括:电池模块;与电池模块连接的两个充电电路,每个充电电路包括相互串联的充电继电器和一对充电端口;以及控制模块,控制模块被配置为:在第一充电枪通过一个充电电路的充电端口为电池模块充电的过程中,当检测到第二充电枪与另一个充电电路的充电端口连接时,先使得电池模块的请求充电电流为0,再进行第一充电枪和第二充电枪对电池模块充电。本公开能够实现单枪充电功能和双枪充电功能,并能在从单枪充电模式切换到双枪充电模式的过程中保护继电器的性能。

用于对电动车辆充电的装置和方法.pdf
根据本发明的实施方式的用于对电动车辆充电的装置包括:充电入口,用于接收来自电动车辆供电设备(EVSE)的电力和充电信息;控制模块,用于基于充电信息来确定充电模式,并且根据所确定的充电模式来输出控制信号;以及充电单元,用于根据来自控制模块的控制信号对电动车辆的电池充电。
用于对电动车辆充电的装置和方法.pdf
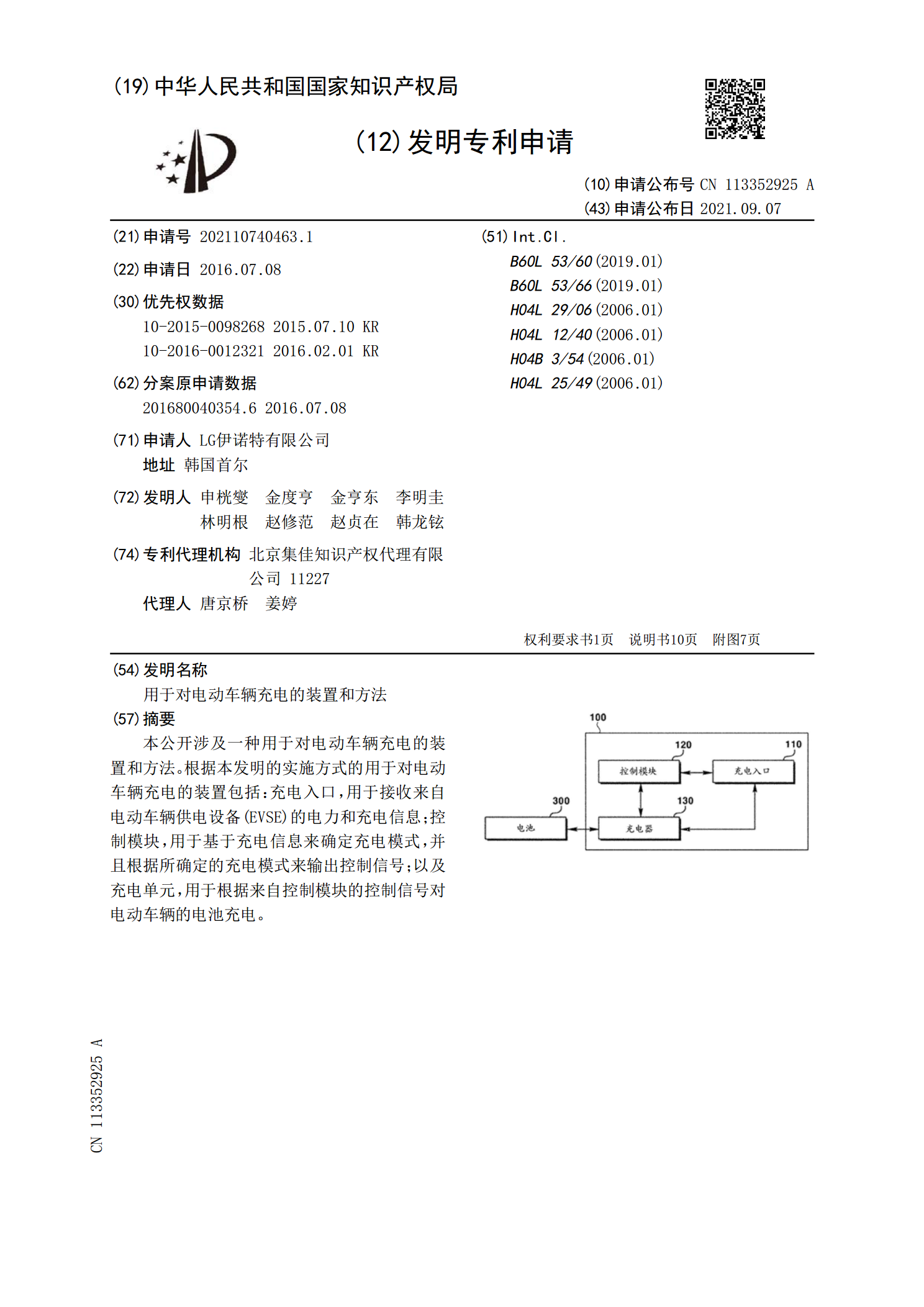
本公开涉及一种用于对电动车辆充电的装置和方法。根据本发明的实施方式的用于对电动车辆充电的装置包括:充电入口,用于接收来自电动车辆供电设备(EVSE)的电力和充电信息;控制模块,用于基于充电信息来确定充电模式,并且根据所确定的充电模式来输出控制信号;以及充电单元,用于根据来自控制模块的控制信号对电动车辆的电池充电。