
一种路径规划方法、装置、设备及存储介质.pdf

志信****pp

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路径规划方法、装置、设备及存储介质.pdf
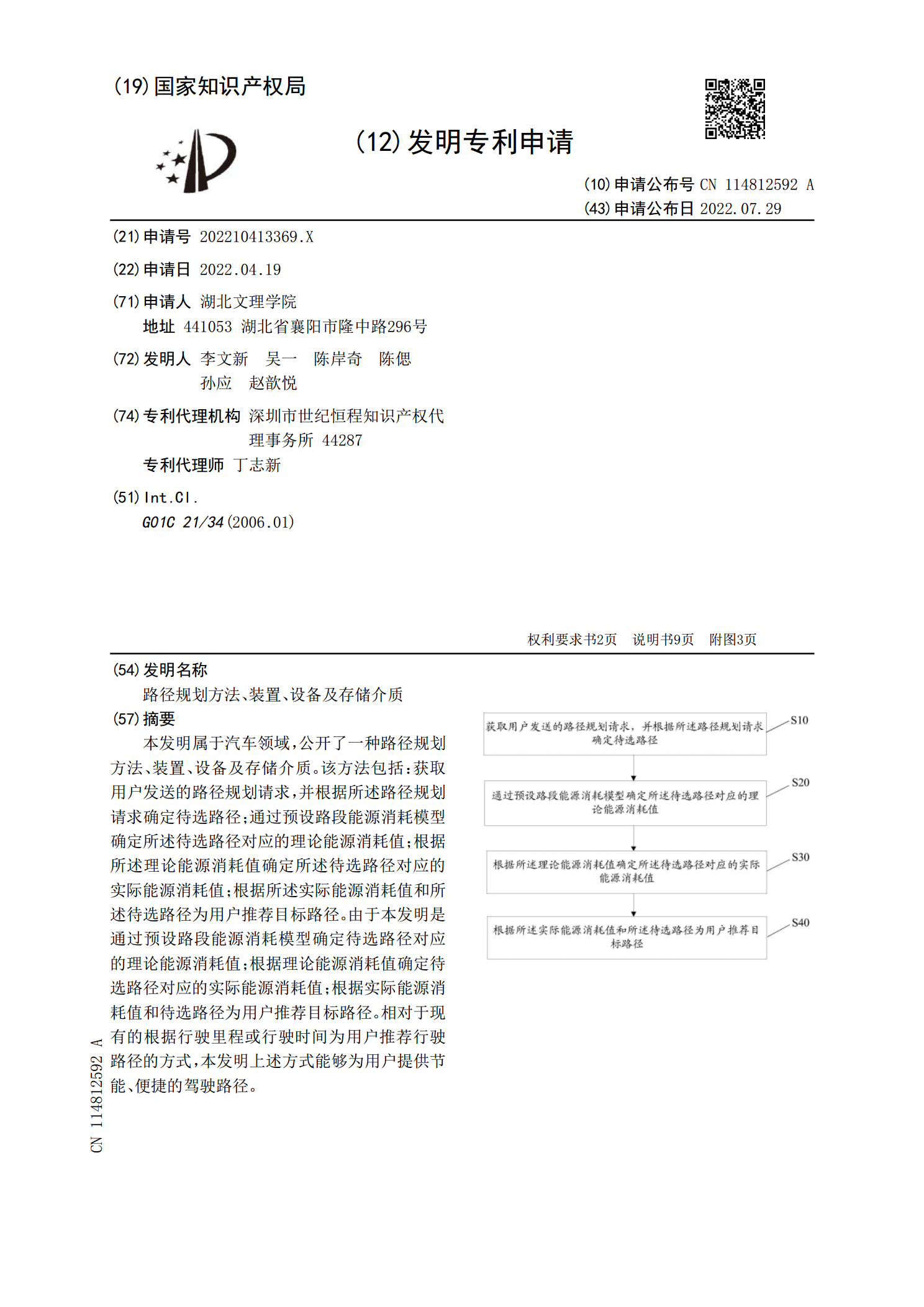
本发明属于汽车领域,公开了一种路径规划方法、装置、设备及存储介质。该方法包括:获取用户发送的路径规划请求,并根据所述路径规划请求确定待选路径;通过预设路段能源消耗模型确定所述待选路径对应的理论能源消耗值;根据所述理论能源消耗值确定所述待选路径对应的实际能源消耗值;根据所述实际能源消耗值和所述待选路径为用户推荐目标路径。由于本发明是通过预设路段能源消耗模型确定待选路径对应的理论能源消耗值;根据理论能源消耗值确定待选路径对应的实际能源消耗值;根据实际能源消耗值和待选路径为用户推荐目标路径。相对于现有的根据行驶
配送路径规划方法、装置、设备及存储介质.pdf
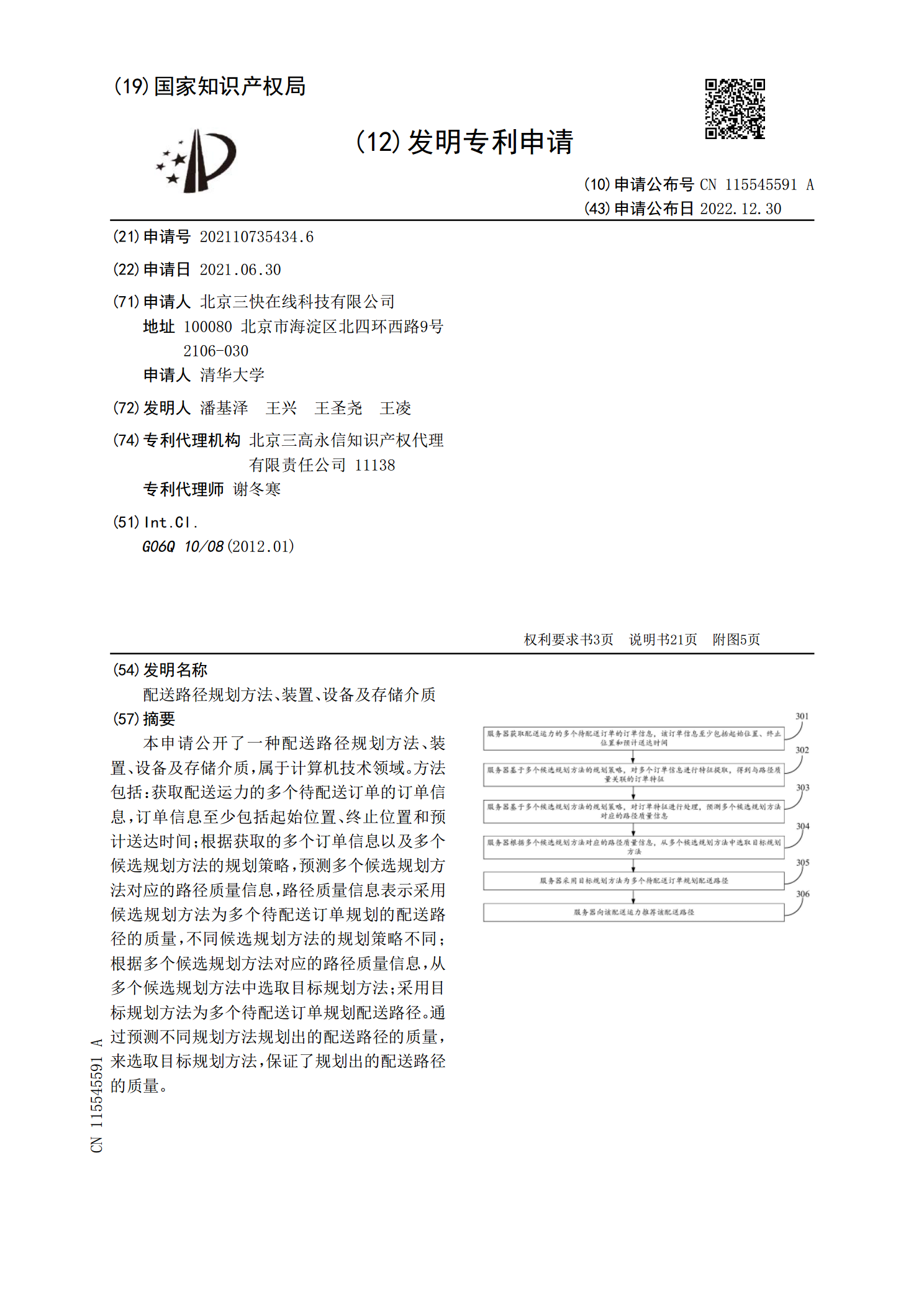
本申请公开了一种配送路径规划方法、装置、设备及存储介质,属于计算机技术领域。方法包括:获取配送运力的多个待配送订单的订单信息,订单信息至少包括起始位置、终止位置和预计送达时间;根据获取的多个订单信息以及多个候选规划方法的规划策略,预测多个候选规划方法对应的路径质量信息,路径质量信息表示采用候选规划方法为多个待配送订单规划的配送路径的质量,不同候选规划方法的规划策略不同;根据多个候选规划方法对应的路径质量信息,从多个候选规划方法中选取目标规划方法;采用目标规划方法为多个待配送订单规划配送路径。通过预测不同规
一种路径规划方法、装置、设备及存储介质.pdf
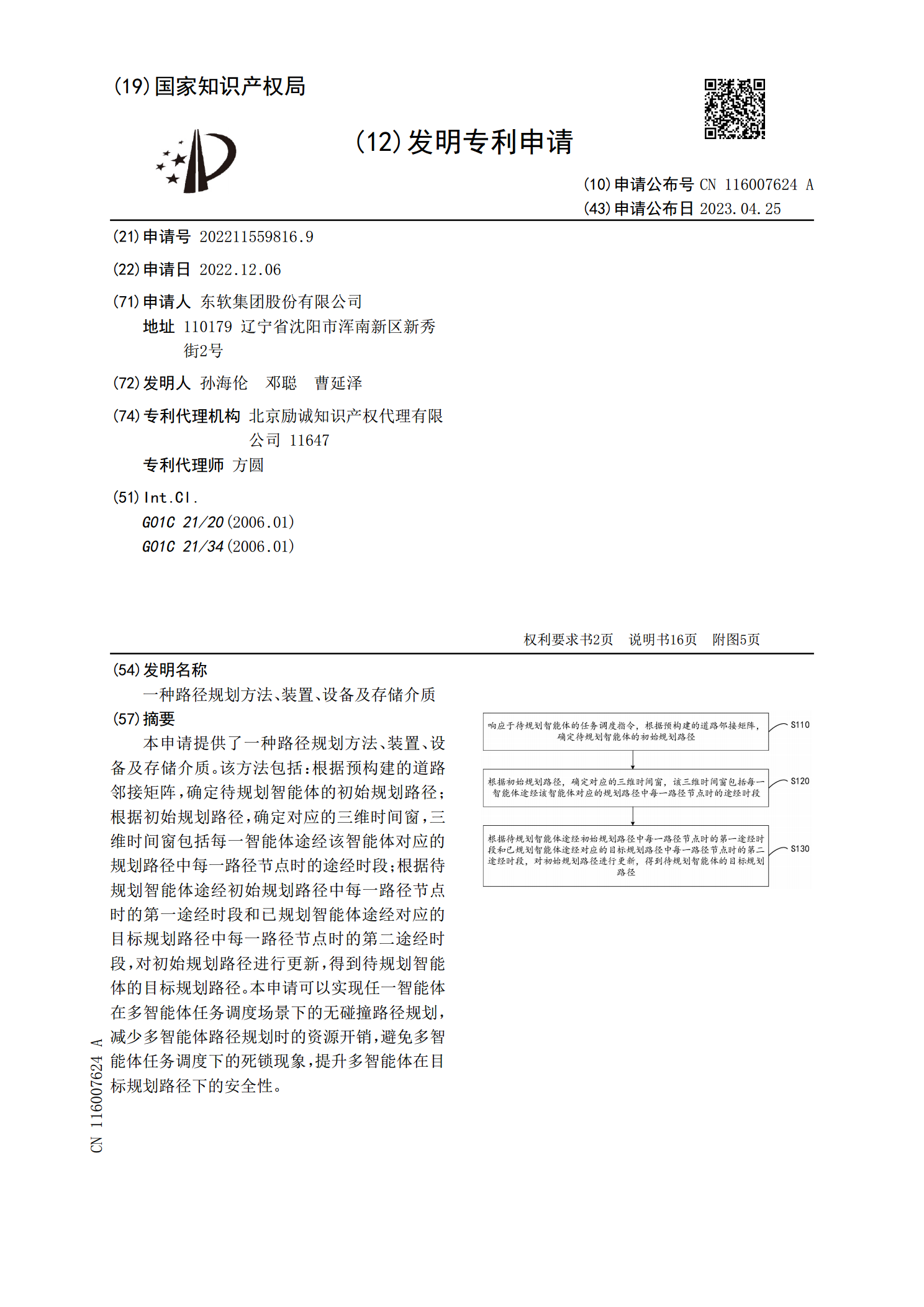
本申请提供了一种路径规划方法、装置、设备及存储介质。该方法包括:根据预构建的道路邻接矩阵,确定待规划智能体的初始规划路径;根据初始规划路径,确定对应的三维时间窗,三维时间窗包括每一智能体途经该智能体对应的规划路径中每一路径节点时的途经时段;根据待规划智能体途经初始规划路径中每一路径节点时的第一途经时段和已规划智能体途经对应的目标规划路径中每一路径节点时的第二途经时段,对初始规划路径进行更新,得到待规划智能体的目标规划路径。本申请可以实现任一智能体在多智能体任务调度场景下的无碰撞路径规划,减少多智能体路径规
一种路径规划方法、装置、设备及存储介质.pdf
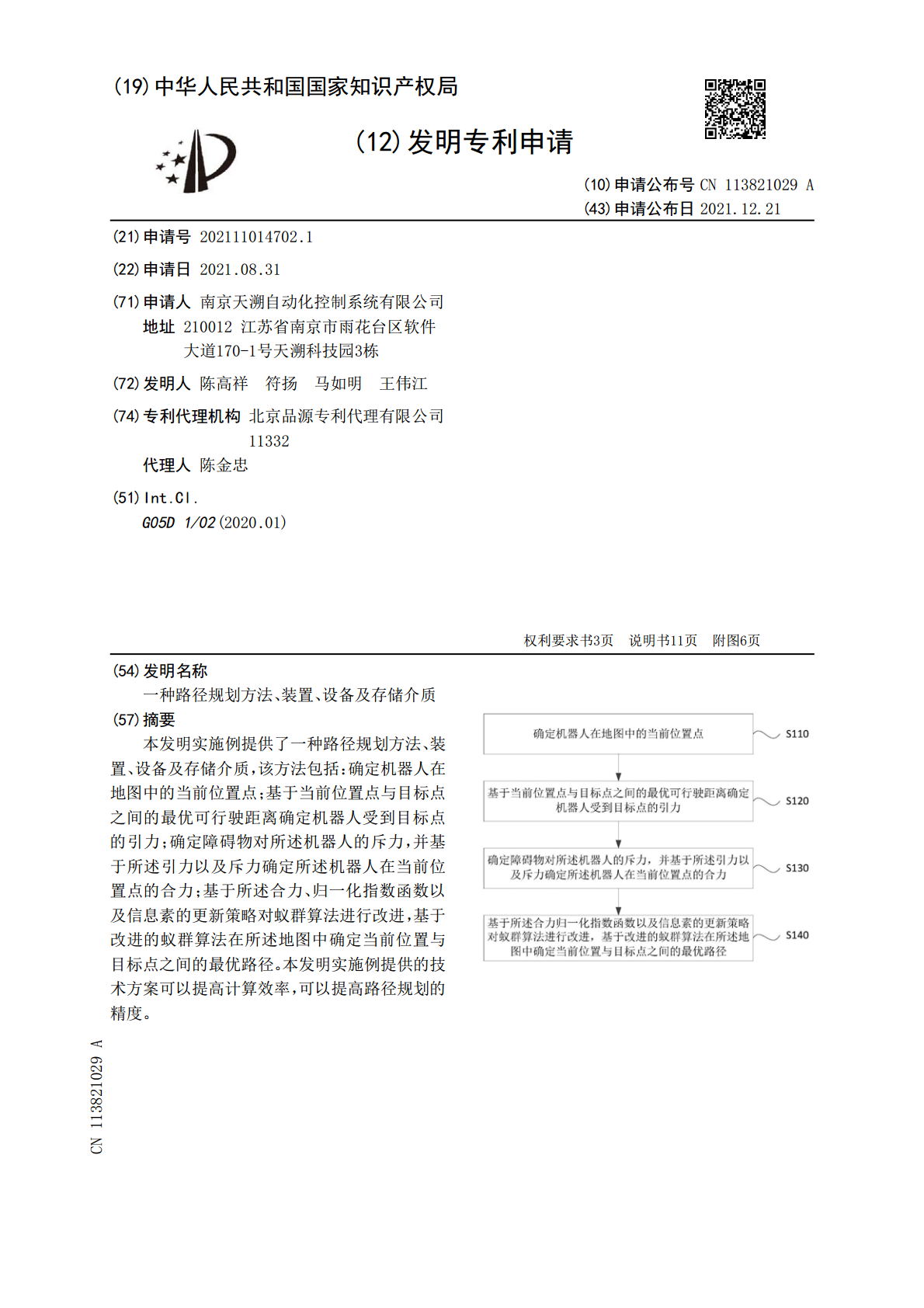
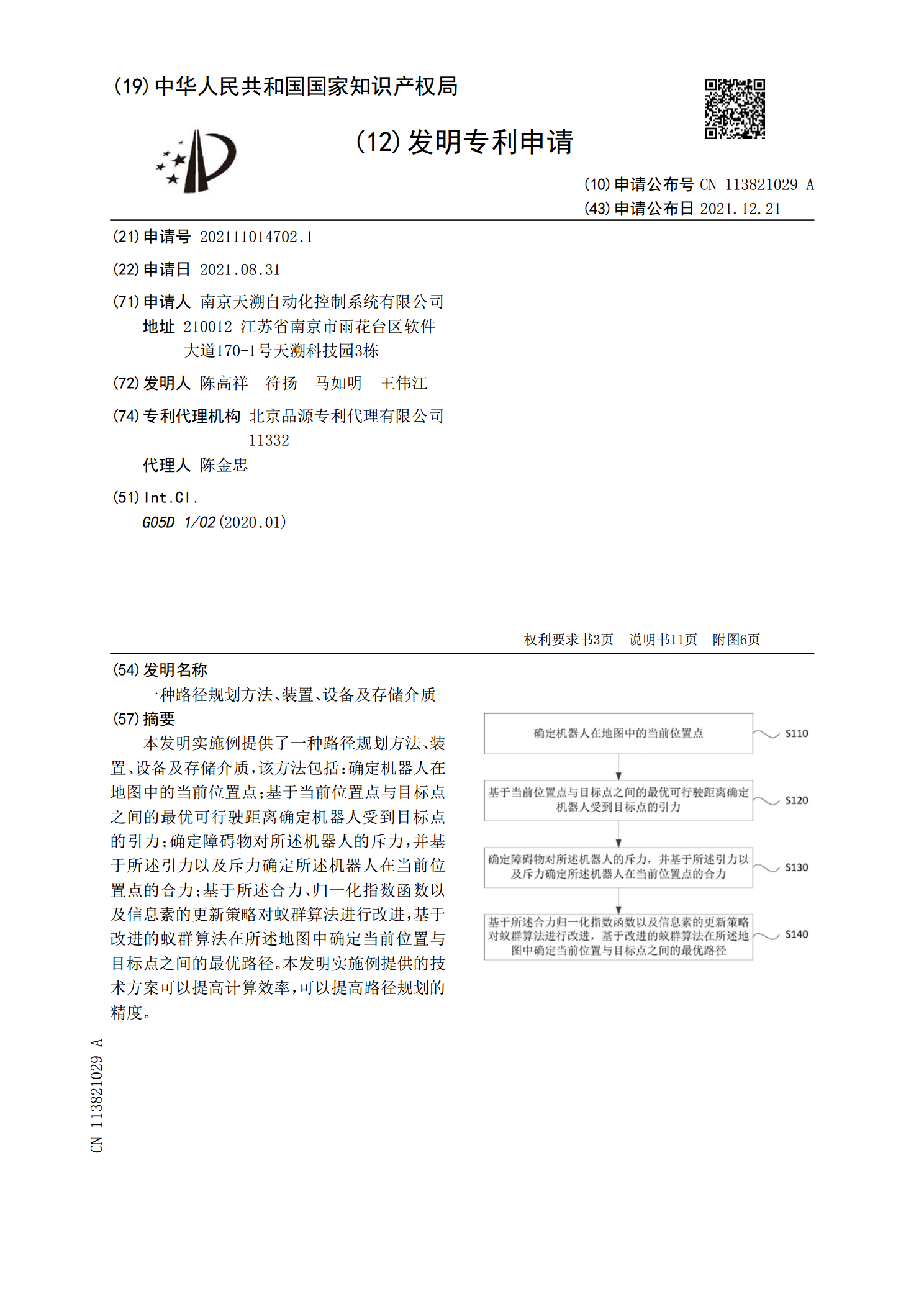
本发明实施例提供了一种路径规划方法、装置、设备及存储介质,该方法包括:确定机器人在地图中的当前位置点;基于当前位置点与目标点之间的最优可行驶距离确定机器人受到目标点的引力;确定障碍物对所述机器人的斥力,并基于所述引力以及斥力确定所述机器人在当前位置点的合力;基于所述合力、归一化指数函数以及信息素的更新策略对蚁群算法进行改进,基于改进的蚁群算法在所述地图中确定当前位置与目标点之间的最优路径。本发明实施例提供的技术方案可以提高计算效率,可以提高路径规划的精度。
一种路径规划方法、装置、设备及可读存储介质.pdf
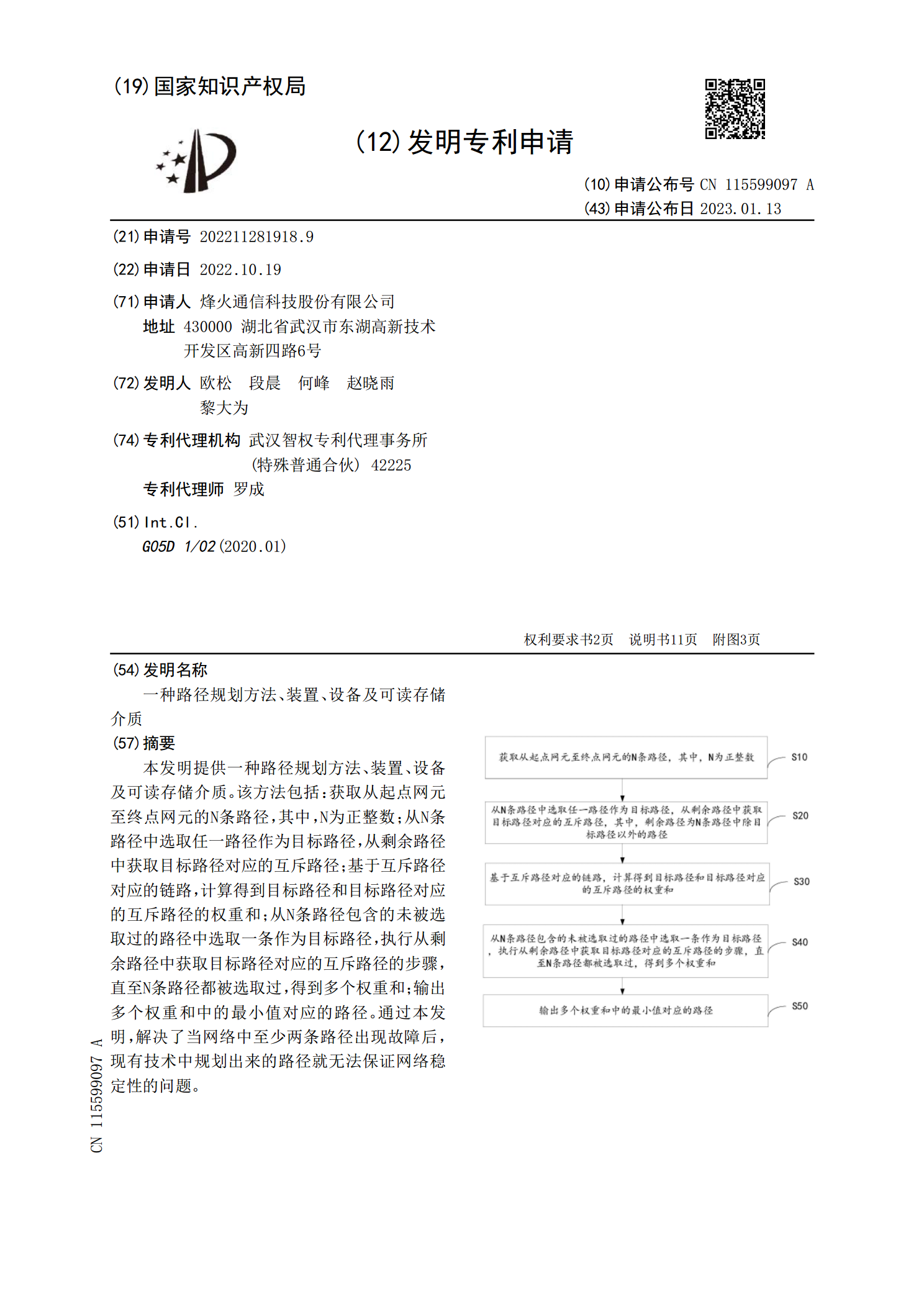
本发明提供一种路径规划方法、装置、设备及可读存储介质。该方法包括:获取从起点网元至终点网元的N条路径,其中,N为正整数;从N条路径中选取任一路径作为目标路径,从剩余路径中获取目标路径对应的互斥路径;基于互斥路径对应的链路,计算得到目标路径和目标路径对应的互斥路径的权重和;从N条路径包含的未被选取过的路径中选取一条作为目标路径,执行从剩余路径中获取目标路径对应的互斥路径的步骤,直至N条路径都被选取过,得到多个权重和;输出多个权重和中的最小值对应的路径。通过本发明,解决了当网络中至少两条路径出现故障后,现有技