
吊舱控制方法、装置、吊舱、无人机及介质.pdf

书生****22

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
吊舱控制方法、装置、吊舱、无人机及介质.pdf
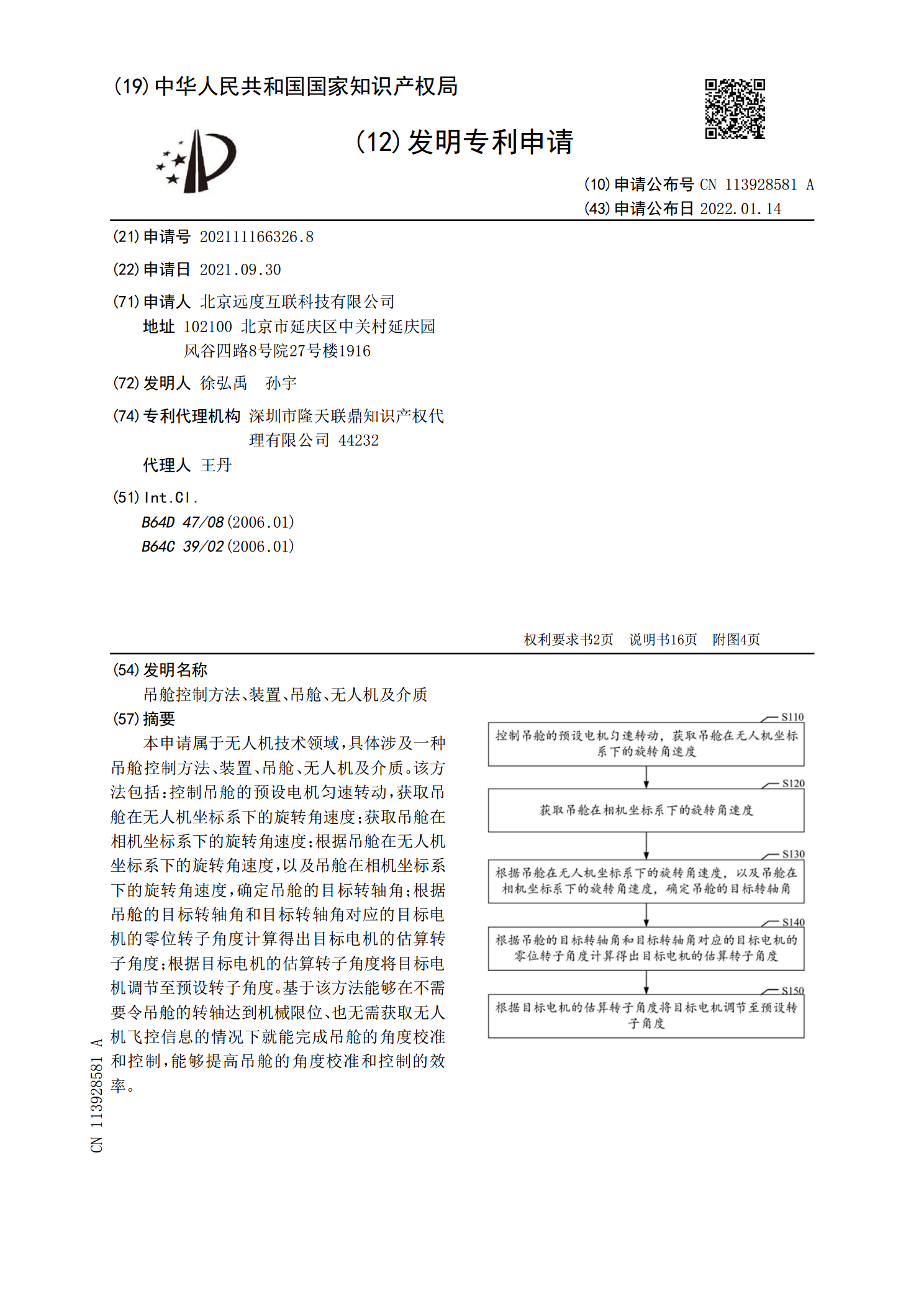
本申请属于无人机技术领域,具体涉及一种吊舱控制方法、装置、吊舱、无人机及介质。该方法包括:控制吊舱的预设电机匀速转动,获取吊舱在无人机坐标系下的旋转角速度;获取吊舱在相机坐标系下的旋转角速度;根据吊舱在无人机坐标系下的旋转角速度,以及吊舱在相机坐标系下的旋转角速度,确定吊舱的目标转轴角;根据吊舱的目标转轴角和目标转轴角对应的目标电机的零位转子角度计算得出目标电机的估算转子角度;根据目标电机的估算转子角度将目标电机调节至预设转子角度。基于该方法能够在不需要令吊舱的转轴达到机械限位、也无需获取无人机飞控信息的
吊舱控制方法、装置、吊舱、无人机及介质.pdf
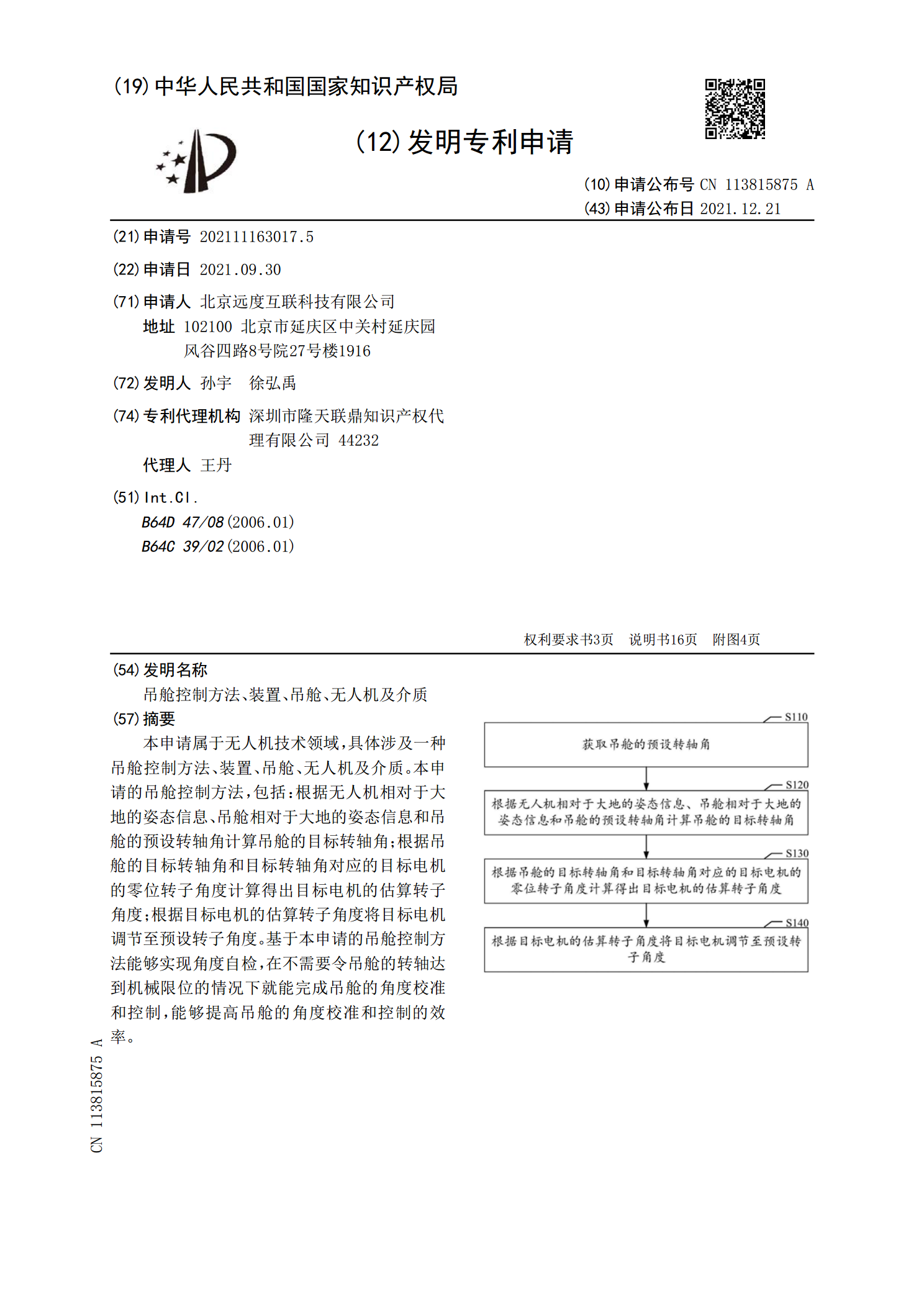
本申请属于无人机技术领域,具体涉及一种吊舱控制方法、装置、吊舱、无人机及介质。本申请的吊舱控制方法,包括:根据无人机相对于大地的姿态信息、吊舱相对于大地的姿态信息和吊舱的预设转轴角计算吊舱的目标转轴角;根据吊舱的目标转轴角和目标转轴角对应的目标电机的零位转子角度计算得出目标电机的估算转子角度;根据目标电机的估算转子角度将目标电机调节至预设转子角度。基于本申请的吊舱控制方法能够实现角度自检,在不需要令吊舱的转轴达到机械限位的情况下就能完成吊舱的角度校准和控制,能够提高吊舱的角度校准和控制的效率。
基于光电吊舱的目标追踪方法、装置、设备及存储介质.pdf
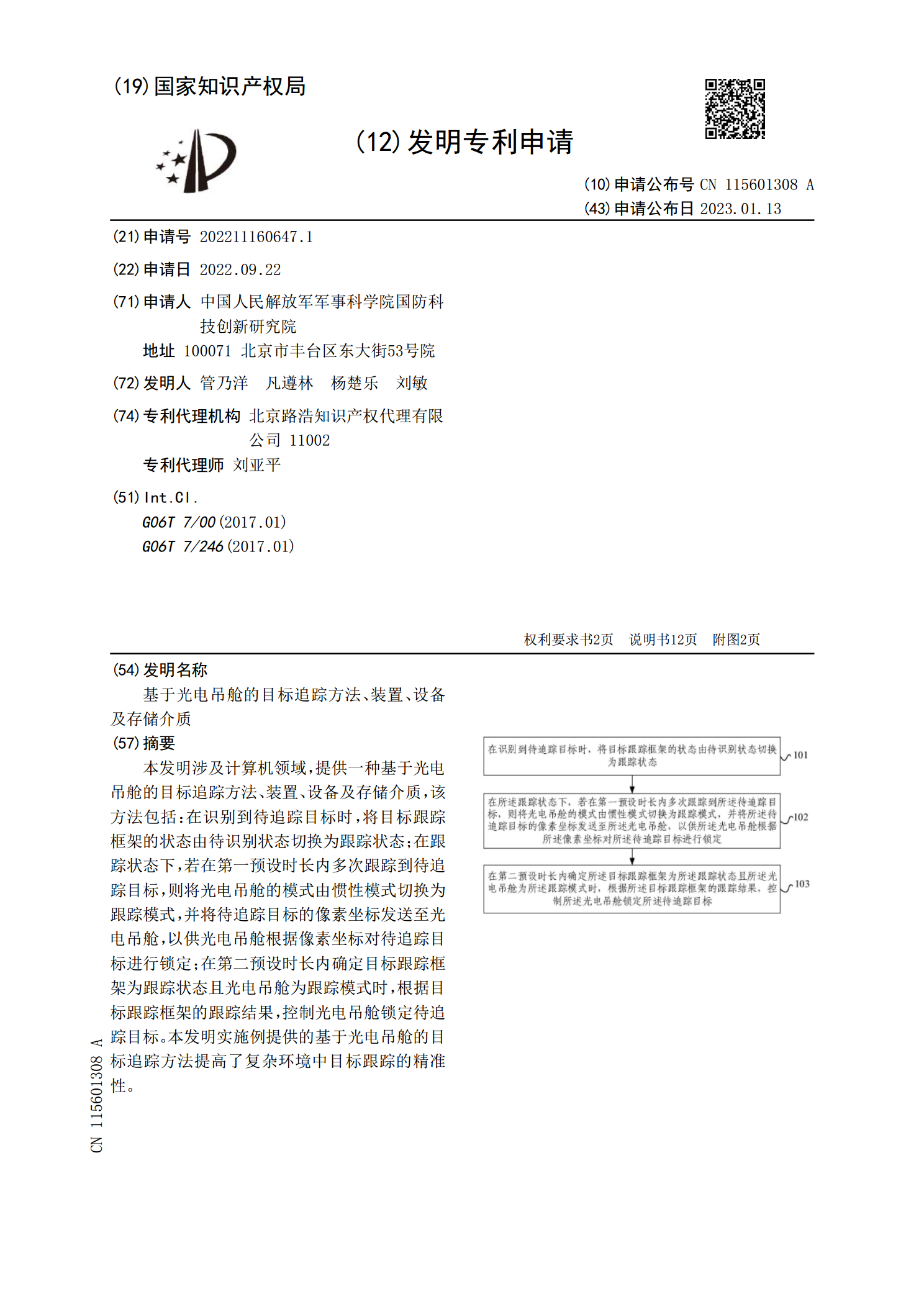
本发明涉及计算机领域,提供一种基于光电吊舱的目标追踪方法、装置、设备及存储介质,该方法包括:在识别到待追踪目标时,将目标跟踪框架的状态由待识别状态切换为跟踪状态;在跟踪状态下,若在第一预设时长内多次跟踪到待追踪目标,则将光电吊舱的模式由惯性模式切换为跟踪模式,并将待追踪目标的像素坐标发送至光电吊舱,以供光电吊舱根据像素坐标对待追踪目标进行锁定;在第二预设时长内确定目标跟踪框架为跟踪状态且光电吊舱为跟踪模式时,根据目标跟踪框架的跟踪结果,控制光电吊舱锁定待追踪目标。本发明实施例提供的基于光电吊舱的目标追踪方

吊舱.pdf
本发明公开了一种吊舱,包括用于安装成像传感器的壳体,还包括连接有向下悬伸的支架的连接板,所述壳体连接在支架上,连接板上设有用于驱动支架旋转的方位电机;所述壳体设置于两连接臂之间并绕水平的转动轴线与两连接臂分别转动装配,壳体内固定有用于驱动壳体绕水平轴线转动的俯仰电机,所述连接臂上设有与壳体的转动轴线同轴设置的壳体转轴,该壳体转轴通过行星齿轮传动副与所述俯仰电机的输出轴传动连接实现俯仰电机对壳体俯仰转动动作的驱动。本发明由于采用对称的Y形结构的支架而提高了吊舱的整体强度,并采用两个框架轴系实现支架、壳体的独
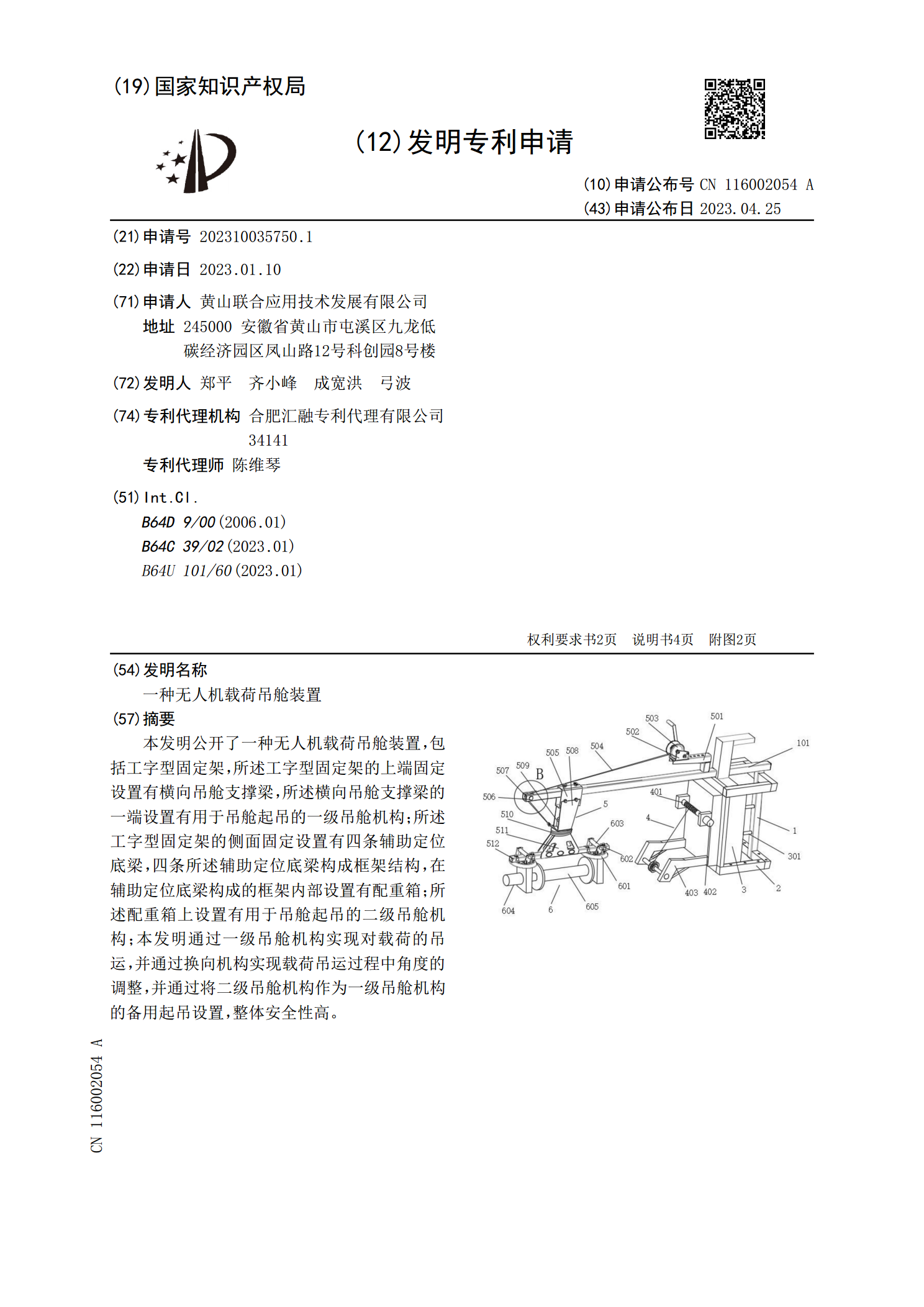
一种无人机载荷吊舱装置.pdf
本发明公开了一种无人机载荷吊舱装置,包括工字型固定架,所述工字型固定架的上端固定设置有横向吊舱支撑梁,所述横向吊舱支撑梁的一端设置有用于吊舱起吊的一级吊舱机构;所述工字型固定架的侧面固定设置有四条辅助定位底梁,四条所述辅助定位底梁构成框架结构,在辅助定位底梁构成的框架内部设置有配重箱;所述配重箱上设置有用于吊舱起吊的二级吊舱机构;本发明通过一级吊舱机构实现对载荷的吊运,并通过换向机构实现载荷吊运过程中角度的调整,并通过将二级吊舱机构作为一级吊舱机构的备用起吊设置,整体安全性高。