
基于光电吊舱的目标追踪方法、装置、设备及存储介质.pdf

一只****呀淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于光电吊舱的目标追踪方法、装置、设备及存储介质.pdf
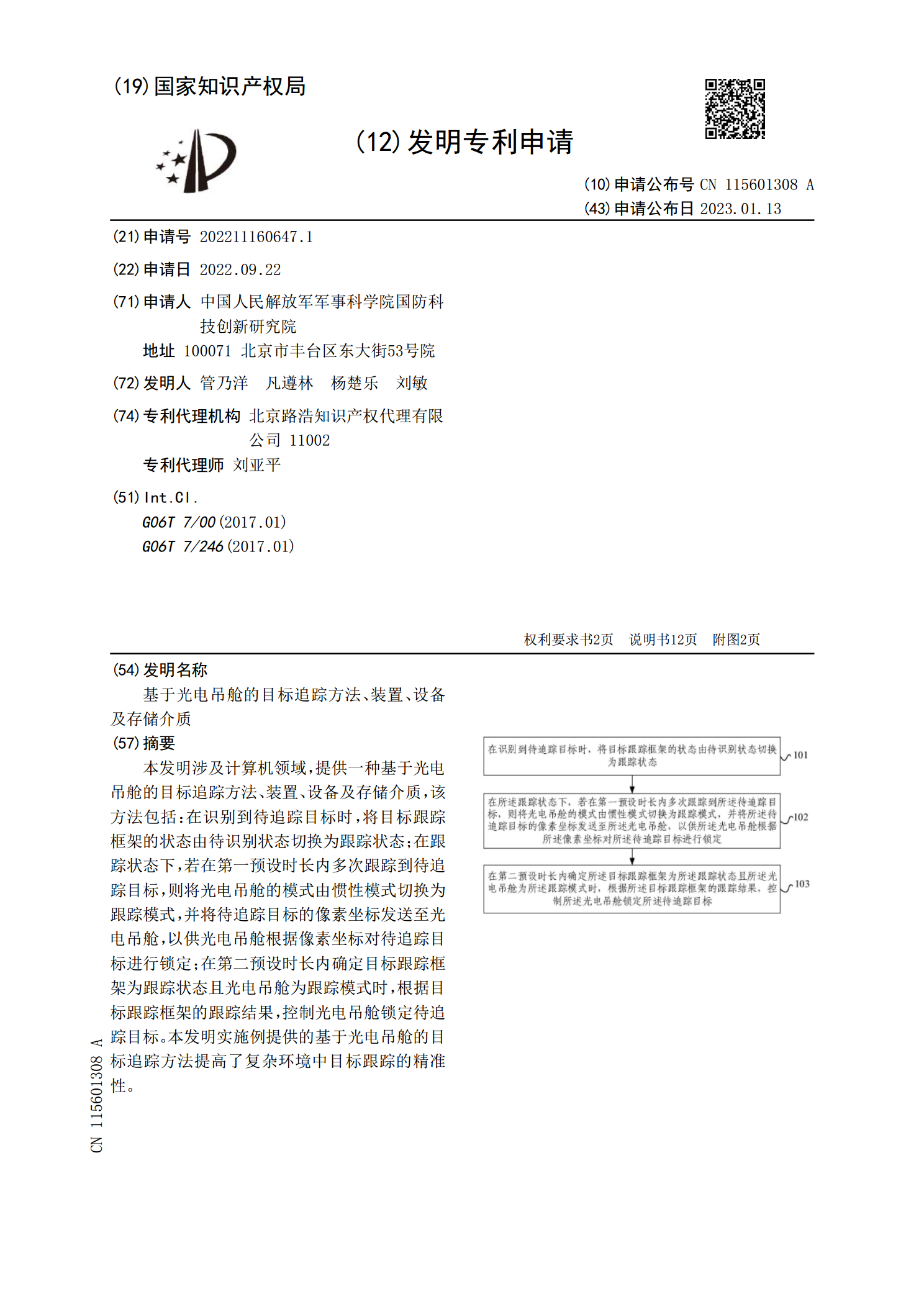
本发明涉及计算机领域,提供一种基于光电吊舱的目标追踪方法、装置、设备及存储介质,该方法包括:在识别到待追踪目标时,将目标跟踪框架的状态由待识别状态切换为跟踪状态;在跟踪状态下,若在第一预设时长内多次跟踪到待追踪目标,则将光电吊舱的模式由惯性模式切换为跟踪模式,并将待追踪目标的像素坐标发送至光电吊舱,以供光电吊舱根据像素坐标对待追踪目标进行锁定;在第二预设时长内确定目标跟踪框架为跟踪状态且光电吊舱为跟踪模式时,根据目标跟踪框架的跟踪结果,控制光电吊舱锁定待追踪目标。本发明实施例提供的基于光电吊舱的目标追踪方

基于蓝牙定位的目标追踪方法、装置、设备及存储介质.pdf
本发明公开了一种基于蓝牙定位的目标追踪方法、装置、设备及存储介质,属于人员定位技术领域。所述方法包括获取目标区域的区域信息;根据目标区域的区域信息,构建分割地图;根据构建得到的分割地图,构建摄像头地图;实时对目标人员在目标区域内的坐标进行定位,根据目标人员的实时坐标,调用不同摄像头对目标人员进行监控。本发明可以自动对摄像头的监控区域进行划分,不用再经过复杂的计算,方便快捷;同时不需要大量警力去查看监控,当发生紧急情况时,系统可以自动切换所定位人员的监控画面,节省了人力;此外,由于将蓝牙定位和视频监控相结合
目标轨迹追踪方法及装置、存储介质、电子设备.pdf
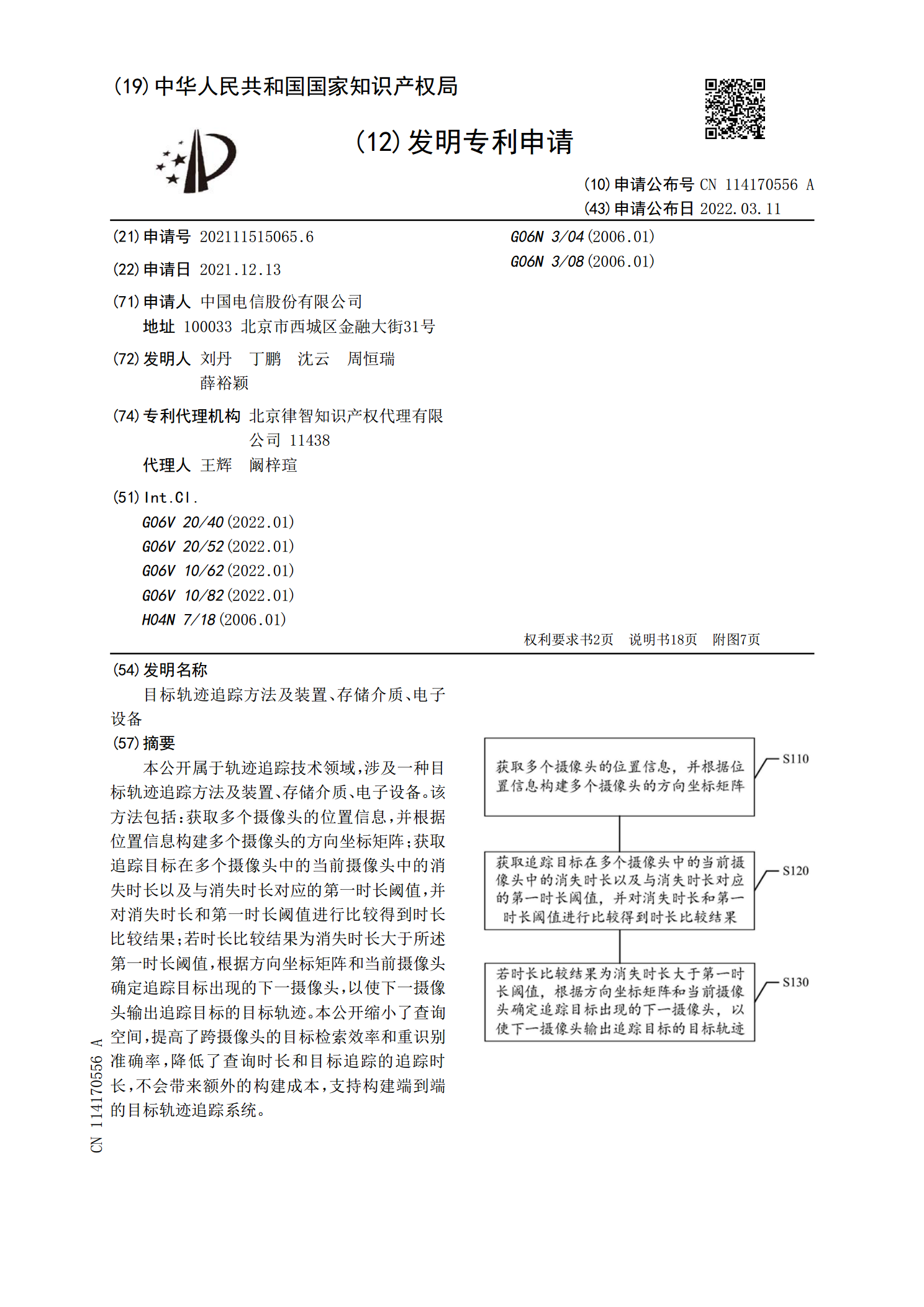
本公开属于轨迹追踪技术领域,涉及一种目标轨迹追踪方法及装置、存储介质、电子设备。该方法包括:获取多个摄像头的位置信息,并根据位置信息构建多个摄像头的方向坐标矩阵;获取追踪目标在多个摄像头中的当前摄像头中的消失时长以及与消失时长对应的第一时长阈值,并对消失时长和第一时长阈值进行比较得到时长比较结果;若时长比较结果为消失时长大于所述第一时长阈值,根据方向坐标矩阵和当前摄像头确定追踪目标出现的下一摄像头,以使下一摄像头输出追踪目标的目标轨迹。本公开缩小了查询空间,提高了跨摄像头的目标检索效率和重识别准确率,降低
基于视频流的目标追踪监测方法、系统、装置及存储介质.pdf
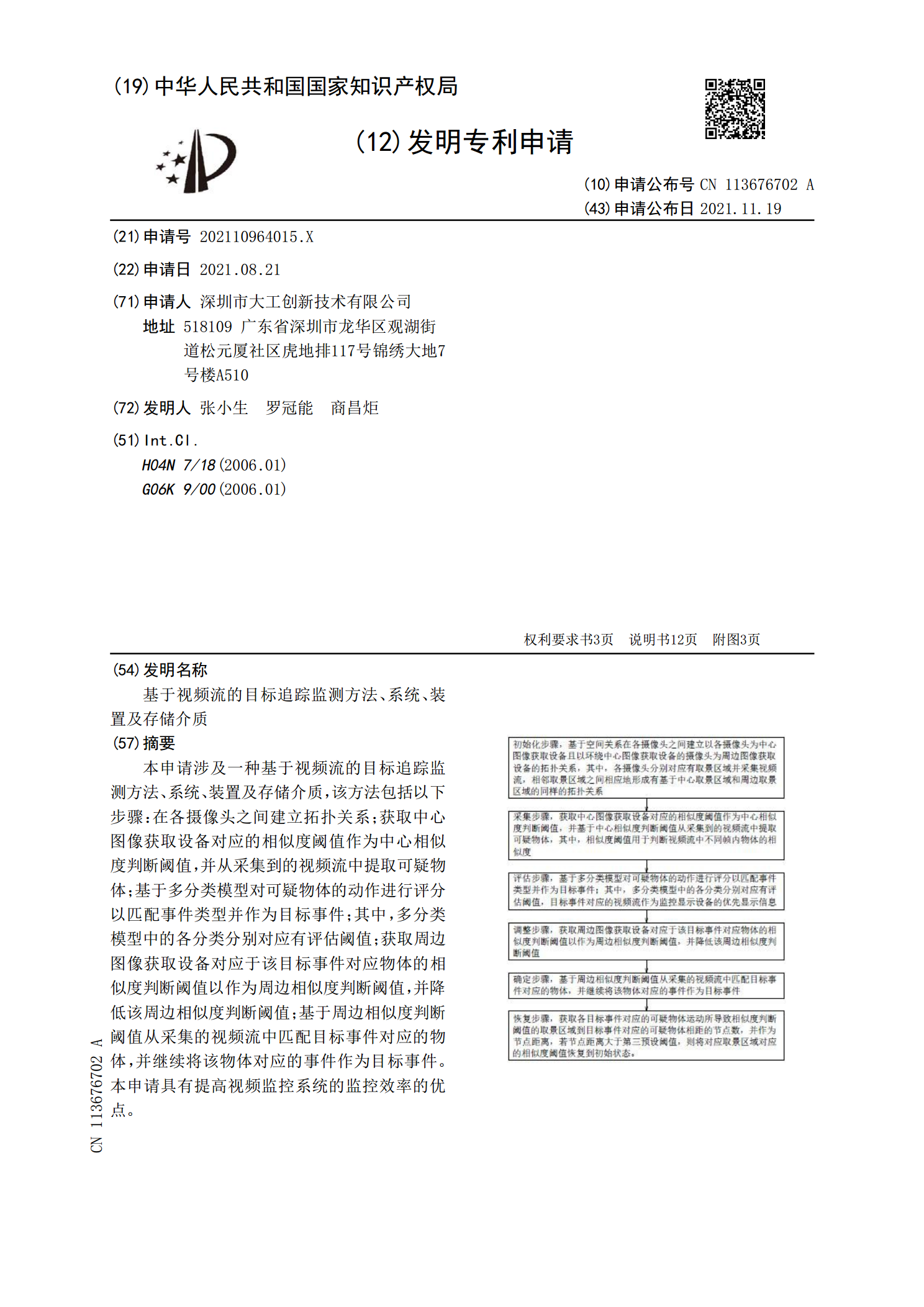
本申请涉及一种基于视频流的目标追踪监测方法、系统、装置及存储介质,该方法包括以下步骤:在各摄像头之间建立拓扑关系;获取中心图像获取设备对应的相似度阈值作为中心相似度判断阈值,并从采集到的视频流中提取可疑物体;基于多分类模型对可疑物体的动作进行评分以匹配事件类型并作为目标事件;其中,多分类模型中的各分类分别对应有评估阈值;获取周边图像获取设备对应于该目标事件对应物体的相似度判断阈值以作为周边相似度判断阈值,并降低该周边相似度判断阈值;基于周边相似度判断阈值从采集的视频流中匹配目标事件对应的物体,并继续将该物
吊舱控制方法、装置、吊舱、无人机及介质.pdf
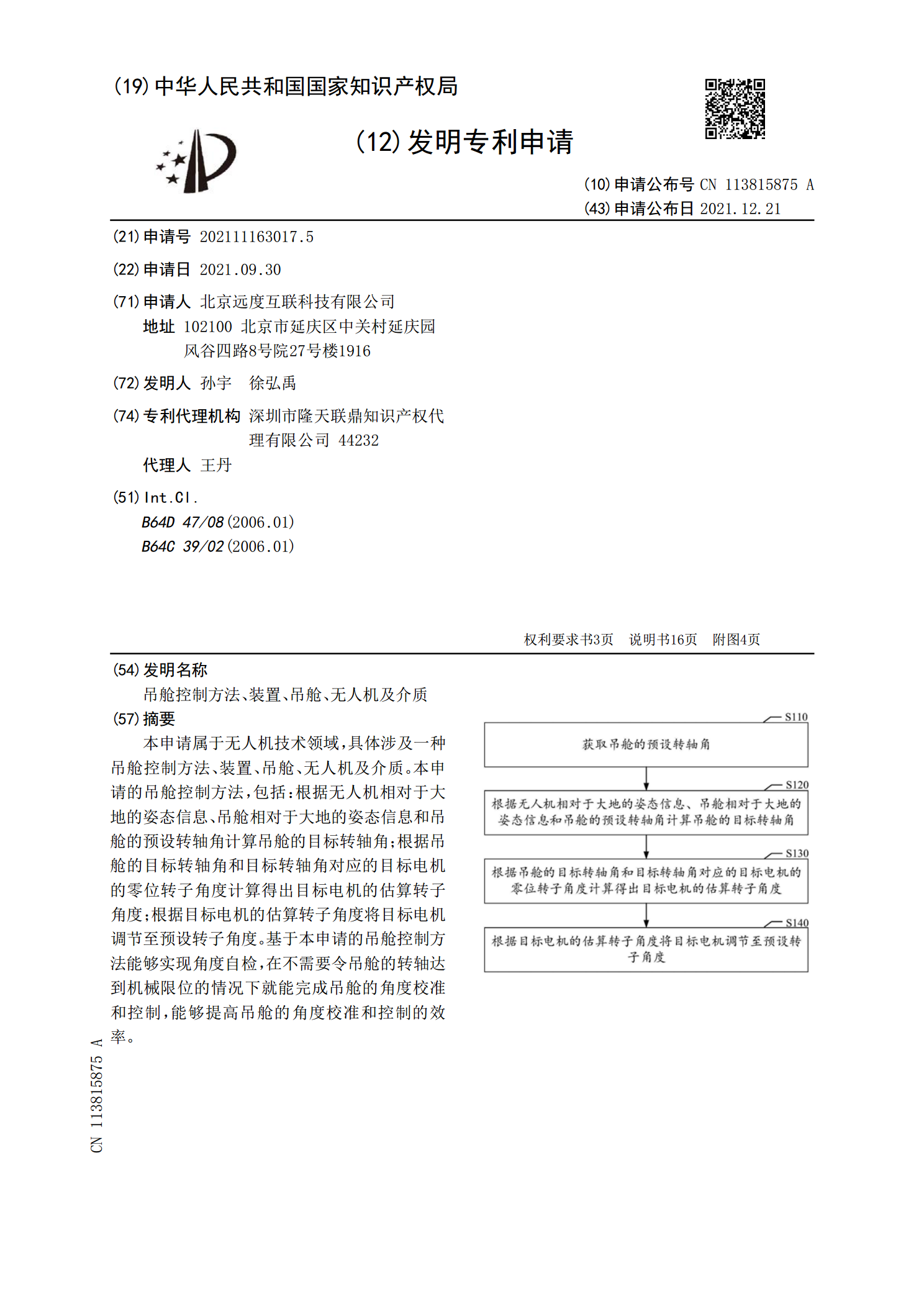
本申请属于无人机技术领域,具体涉及一种吊舱控制方法、装置、吊舱、无人机及介质。本申请的吊舱控制方法,包括:根据无人机相对于大地的姿态信息、吊舱相对于大地的姿态信息和吊舱的预设转轴角计算吊舱的目标转轴角;根据吊舱的目标转轴角和目标转轴角对应的目标电机的零位转子角度计算得出目标电机的估算转子角度;根据目标电机的估算转子角度将目标电机调节至预设转子角度。基于本申请的吊舱控制方法能够实现角度自检,在不需要令吊舱的转轴达到机械限位的情况下就能完成吊舱的角度校准和控制,能够提高吊舱的角度校准和控制的效率。