
一种吊轨式巡检机器人的主动轮组及吊轨式巡检机器人.pdf

依波****bc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种吊轨式巡检机器人的主动轮组及吊轨式巡检机器人.pdf
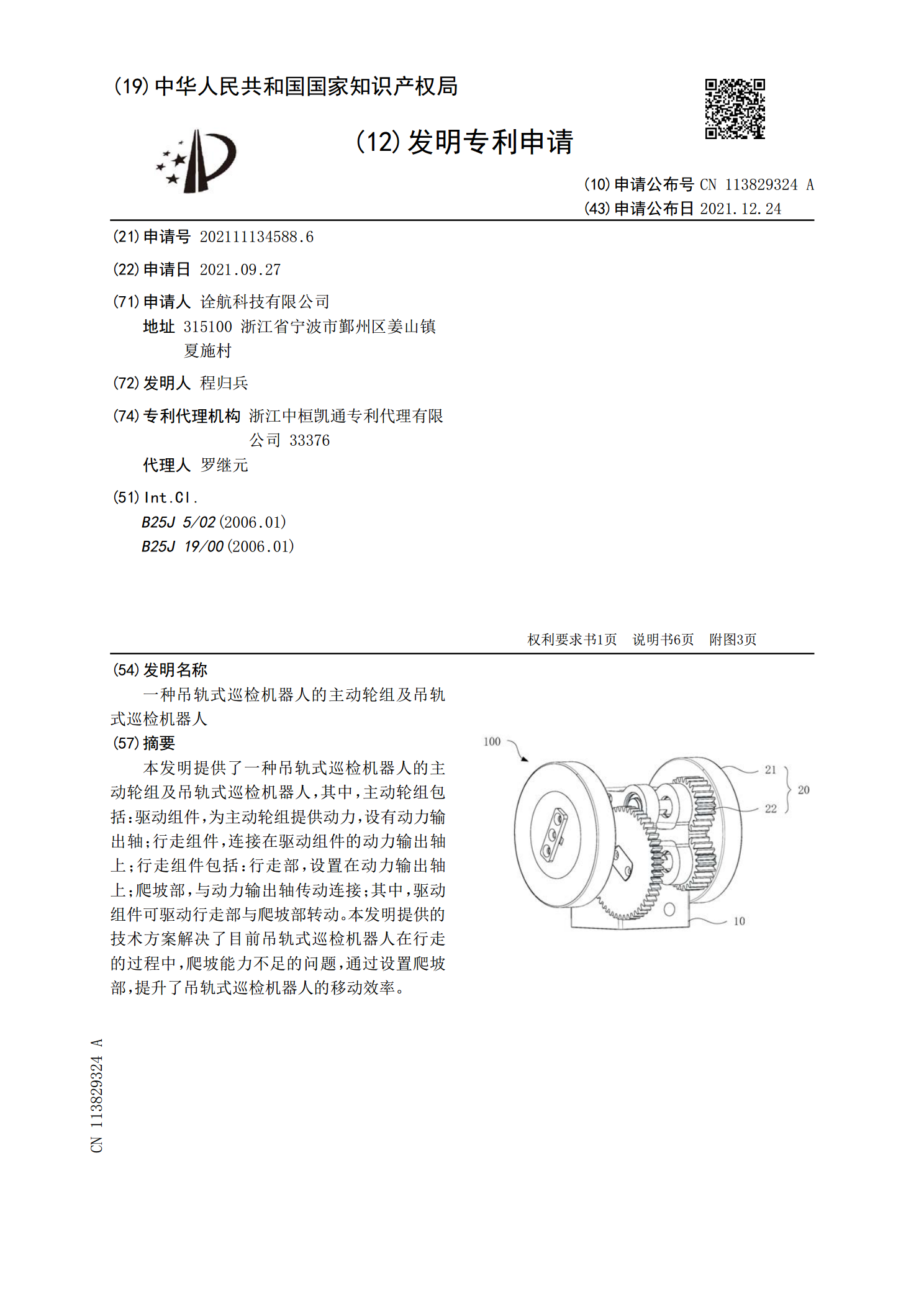
本发明提供了一种吊轨式巡检机器人的主动轮组及吊轨式巡检机器人,其中,主动轮组包括:驱动组件,为主动轮组提供动力,设有动力输出轴;行走组件,连接在驱动组件的动力输出轴上;行走组件包括:行走部,设置在动力输出轴上;爬坡部,与动力输出轴传动连接;其中,驱动组件可驱动行走部与爬坡部转动。本发明提供的技术方案解决了目前吊轨式巡检机器人在行走的过程中,爬坡能力不足的问题,通过设置爬坡部,提升了吊轨式巡检机器人的移动效率。

吊轨式消防巡检机器人.pdf
本发明公开了一种吊轨式消防巡检机器人,包括:行走部、升降视觉装置、定位装置、探测装置、灭火设备操控装置、控制与通讯装置;行走部在吊轨部的轨道上移动;行走部包括主架、万向导向轮组、上斜轮组件、有齿驱动轮组件,万向导向轮组包络在导轨体外,上斜轮组件位于导轨体一侧上部;有齿驱动轮组件驱动所述机器人移动;所述定位装置检测与确定行走部在轨道上的位置;所述探测装置包括:气体检测传感器、烟雾检测装置;灭火设备操控装置对灭火设备进行操作;控制与通讯装置实现所述机器人与远程控制中心通讯连接。本发明的吊轨式消防巡检机器人可沿

一种悬臂吊轨式隧道巡检机器人.pdf
本发明提供了一种悬臂吊轨式隧道巡检机器人,包括机器人本体、驱动机器人本体移动的自主移动装置以及悬臂;悬臂包括第一连杆、连接板和驱动第一连杆运动的第一驱动装置;第一驱动装置包括第一动力输出机构、第一轴承和第一驱动轮;连接板的一端与机器人本体固定,另一端上开设有通孔,第一轴承固定在连接板的通孔内;第一驱动轮朝向第一轴承延伸形成凸块,凸块延伸进第一轴承的内圈中与壁面抵触固定,凸块通过固定螺栓固定在第一连杆上;第一动力输出机构安装在机器人本体上,其动力输出端驱动第一驱动轮转动以带动第一连杆的运动,第一连杆上设置有

一种吊轨式隧道巡检机器人的悬臂.pdf
本发明提供了一种吊轨式隧道巡检机器人的悬臂,包括第一驱动装置、第一连杆以及连接板;第一驱动装置包括第一动力输出机构、第一轴承以及第一驱动轮;连接板的一端用于与机器人本体固定,另一端上开设有通孔,第一轴承固定在连接板的通孔内;第一驱动轮朝向第一轴承延伸形成空心圆形凸块,凸块延伸进第一轴承的内圈中与壁面抵触固定,凸块通过固定螺栓固定在第一连杆的杆体上;第一动力输出机构安装在机器人本体上,第一动力输出机构的动力输出端驱动第一驱动轮转动以带动第一连杆运动,第一连杆上设置有用于检测电缆隧道的多模态传感阵列。应用本技
一种吊轨式巡检机器人轨道及驱动装置.pdf
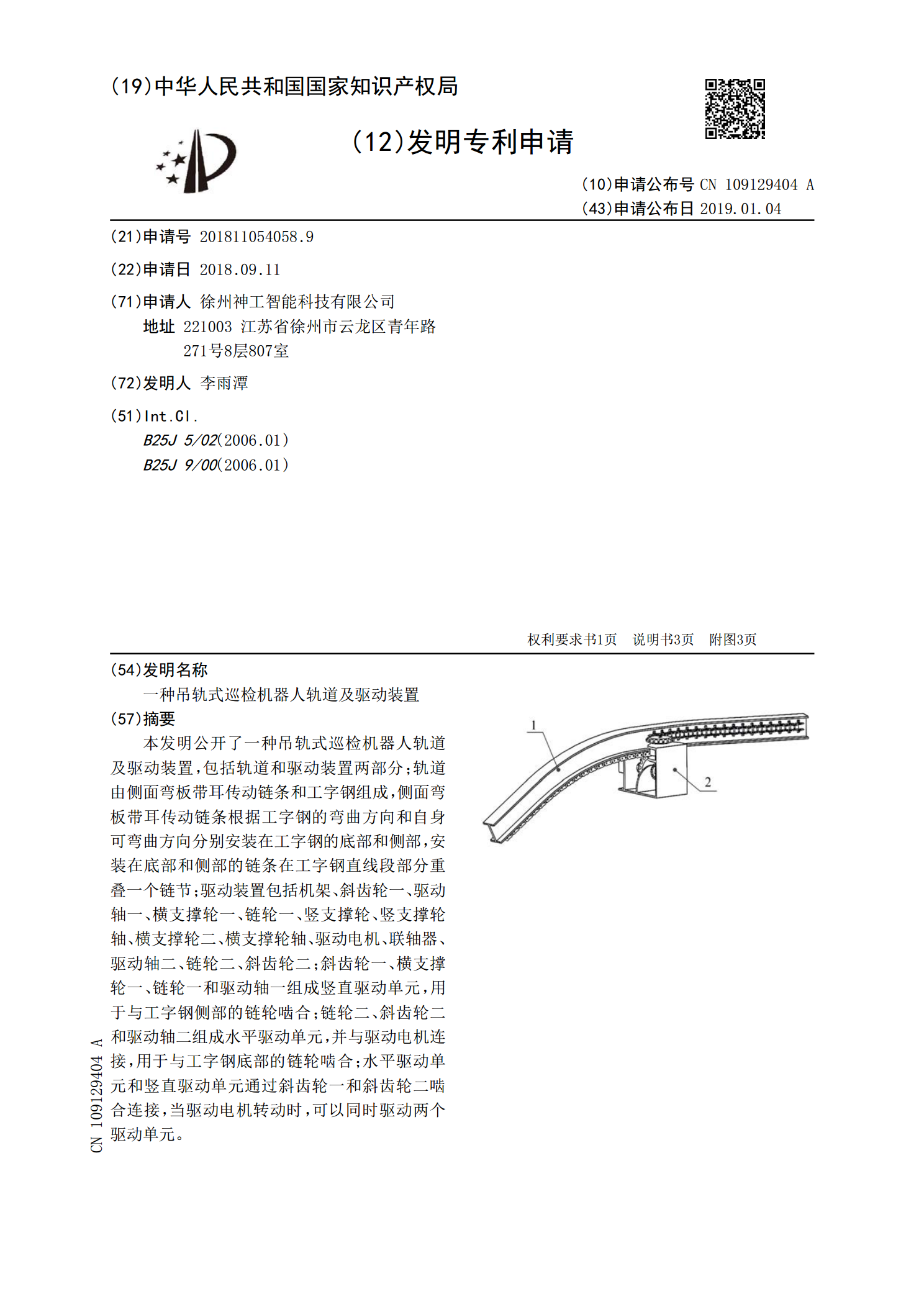
本发明公开了一种吊轨式巡检机器人轨道及驱动装置,包括轨道和驱动装置两部分;轨道由侧面弯板带耳传动链条和工字钢组成,侧面弯板带耳传动链条根据工字钢的弯曲方向和自身可弯曲方向分别安装在工字钢的底部和侧部,安装在底部和侧部的链条在工字钢直线段部分重叠一个链节;驱动装置包括机架、斜齿轮一、驱动轴一、横支撑轮一、链轮一、竖支撑轮、竖支撑轮轴、横支撑轮二、横支撑轮轴、驱动电机、联轴器、驱动轴二、链轮二、斜齿轮二;斜齿轮一、横支撑轮一、链轮一和驱动轴一组成竖直驱动单元,用于与工字钢侧部的链轮啮合;链轮二、斜齿轮二和驱动