
一种摩擦驱动推料机器人.pdf

fu****级甜

1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种摩擦驱动推料机器人.pdf
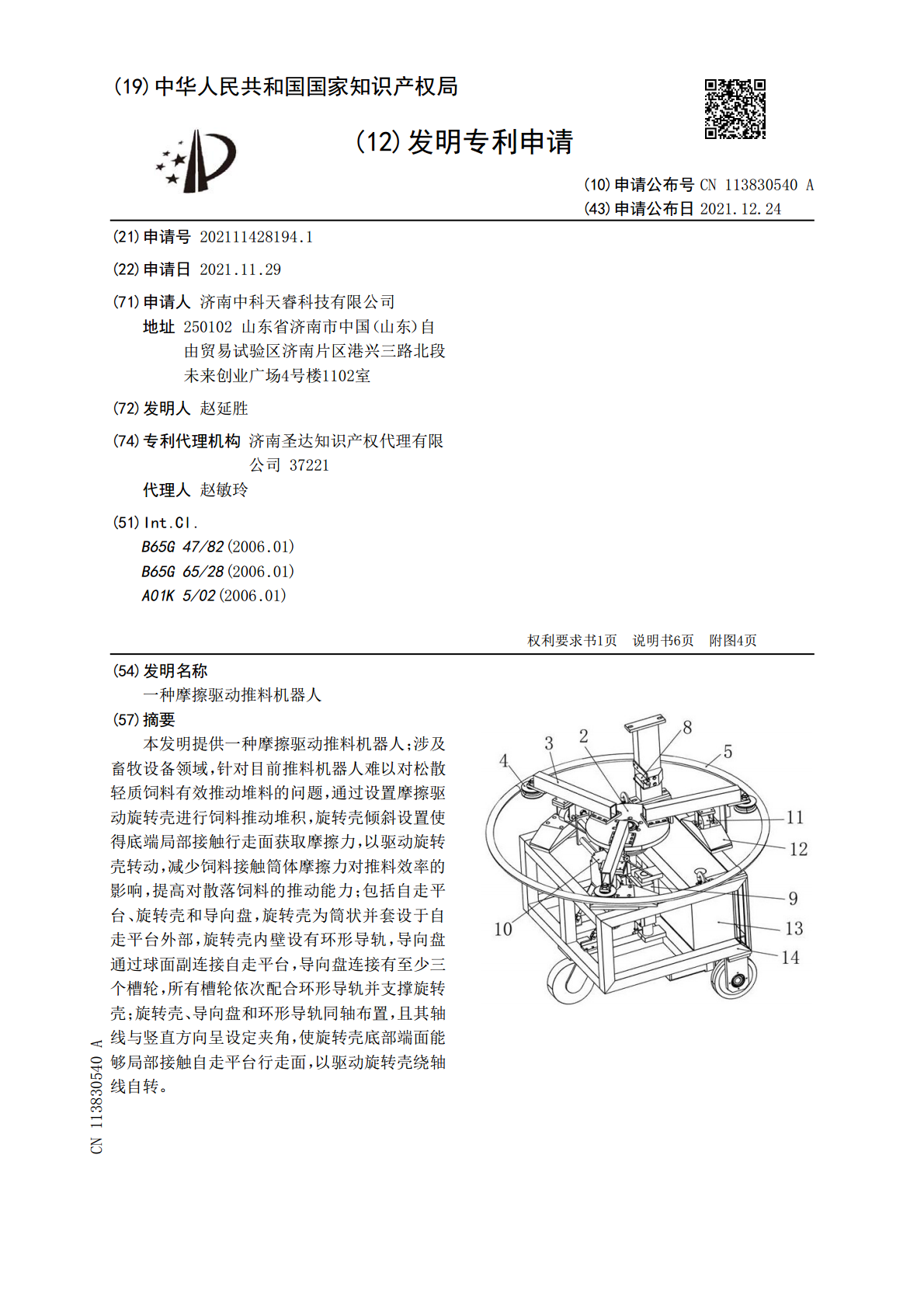
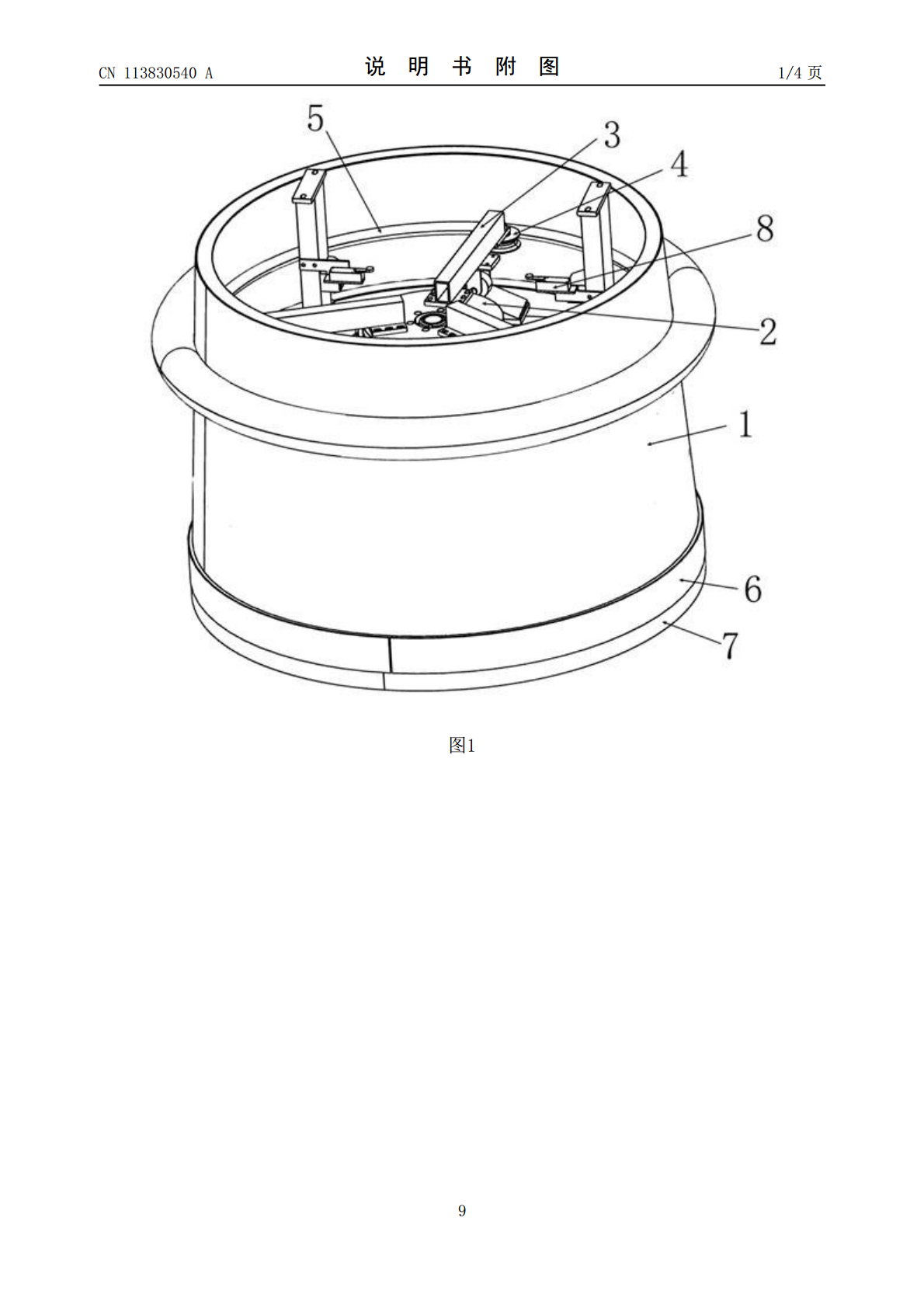
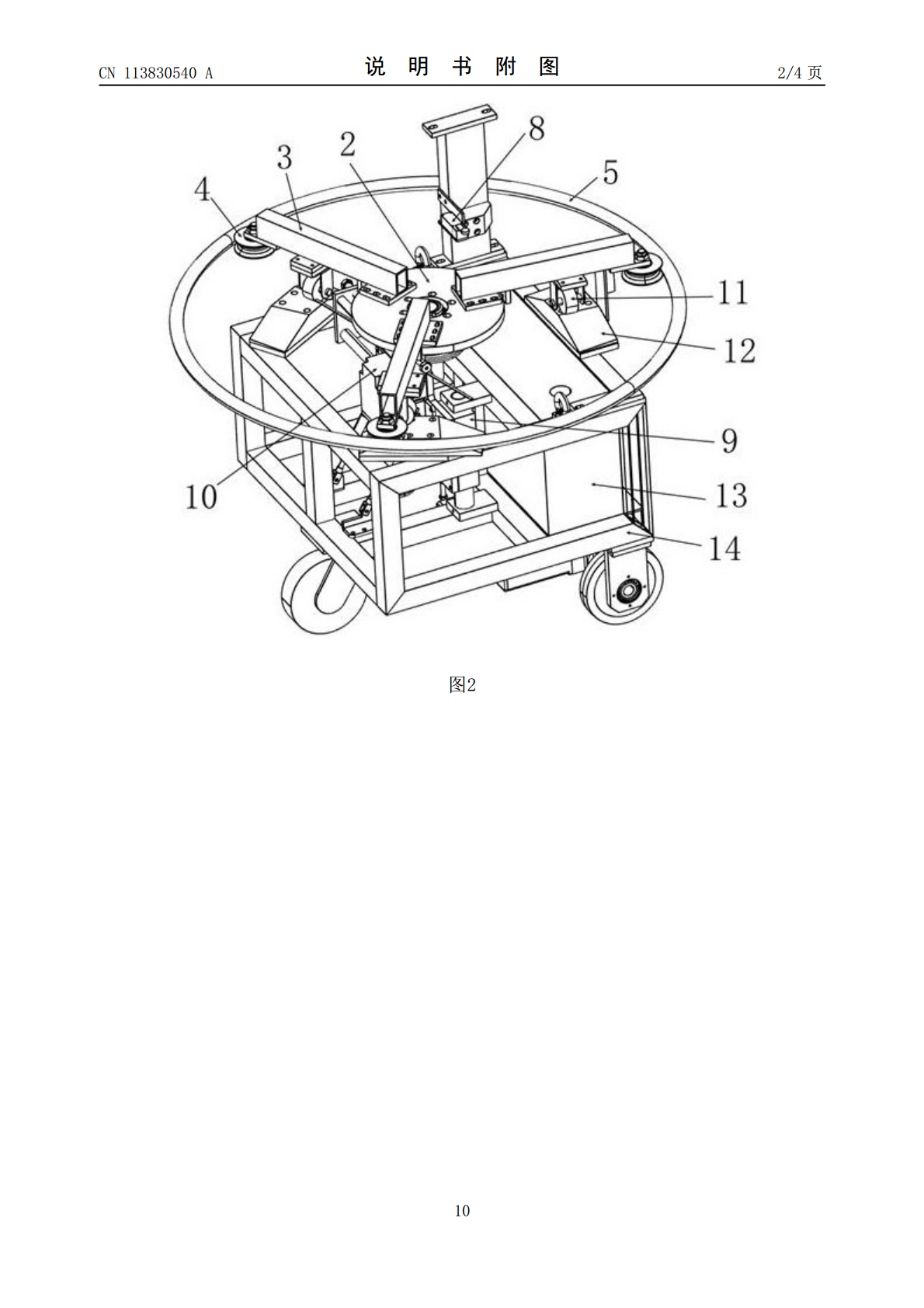
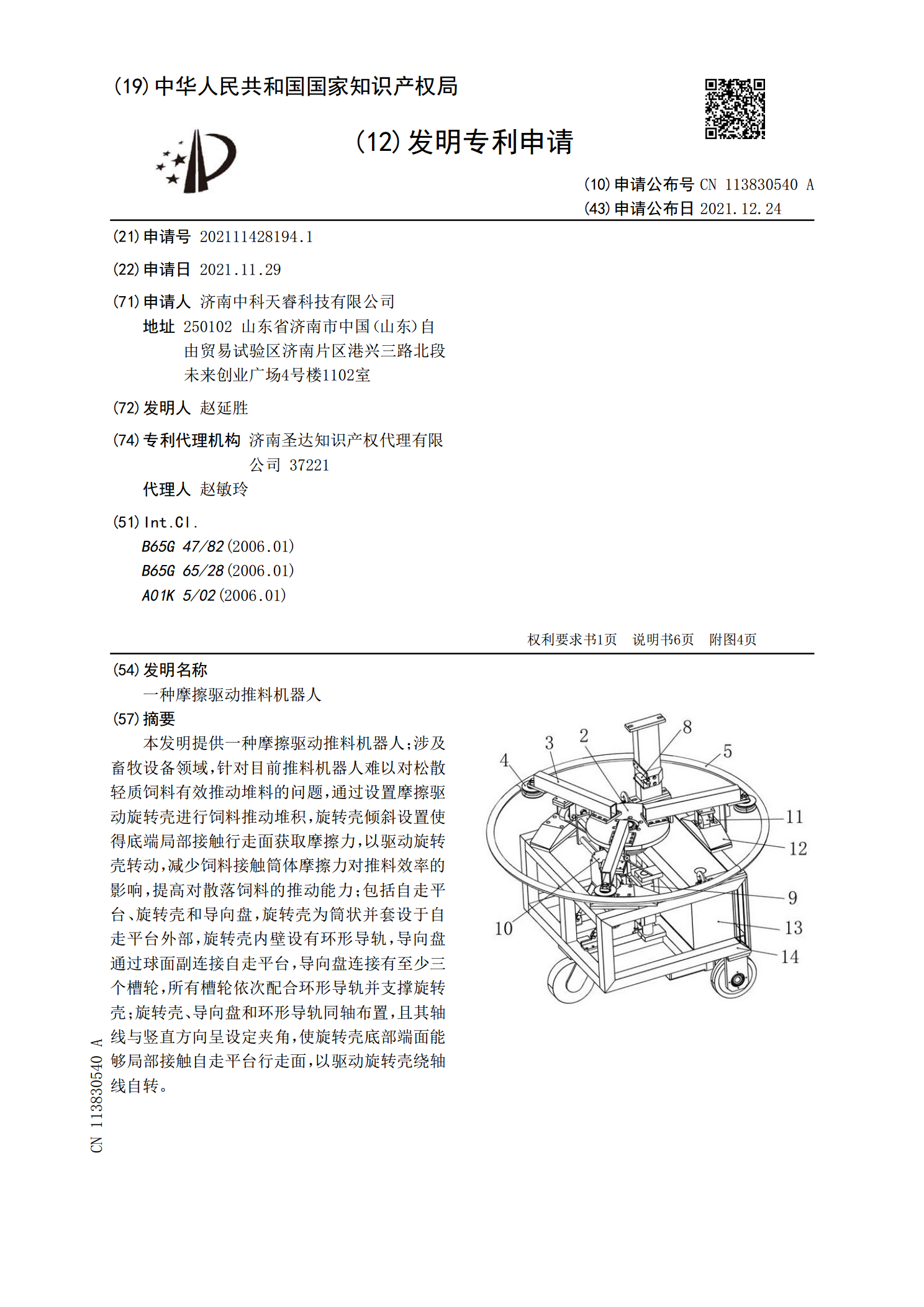
本发明提供一种摩擦驱动推料机器人;涉及畜牧设备领域,针对目前推料机器人难以对松散轻质饲料有效推动堆料的问题,通过设置摩擦驱动旋转壳进行饲料推动堆积,旋转壳倾斜设置使得底端局部接触行走面获取摩擦力,以驱动旋转壳转动,减少饲料接触筒体摩擦力对推料效率的影响,提高对散落饲料的推动能力;包括自走平台、旋转壳和导向盘,旋转壳为筒状并套设于自走平台外部,旋转壳内壁设有环形导轨,导向盘通过球面副连接自走平台,导向盘连接有至少三个槽轮,所有槽轮依次配合环形导轨并支撑旋转壳;旋转壳、导向盘和环形导轨同轴布置,且其轴线与竖直
一种智能饲喂机器人的推料装置及推料方法.pdf
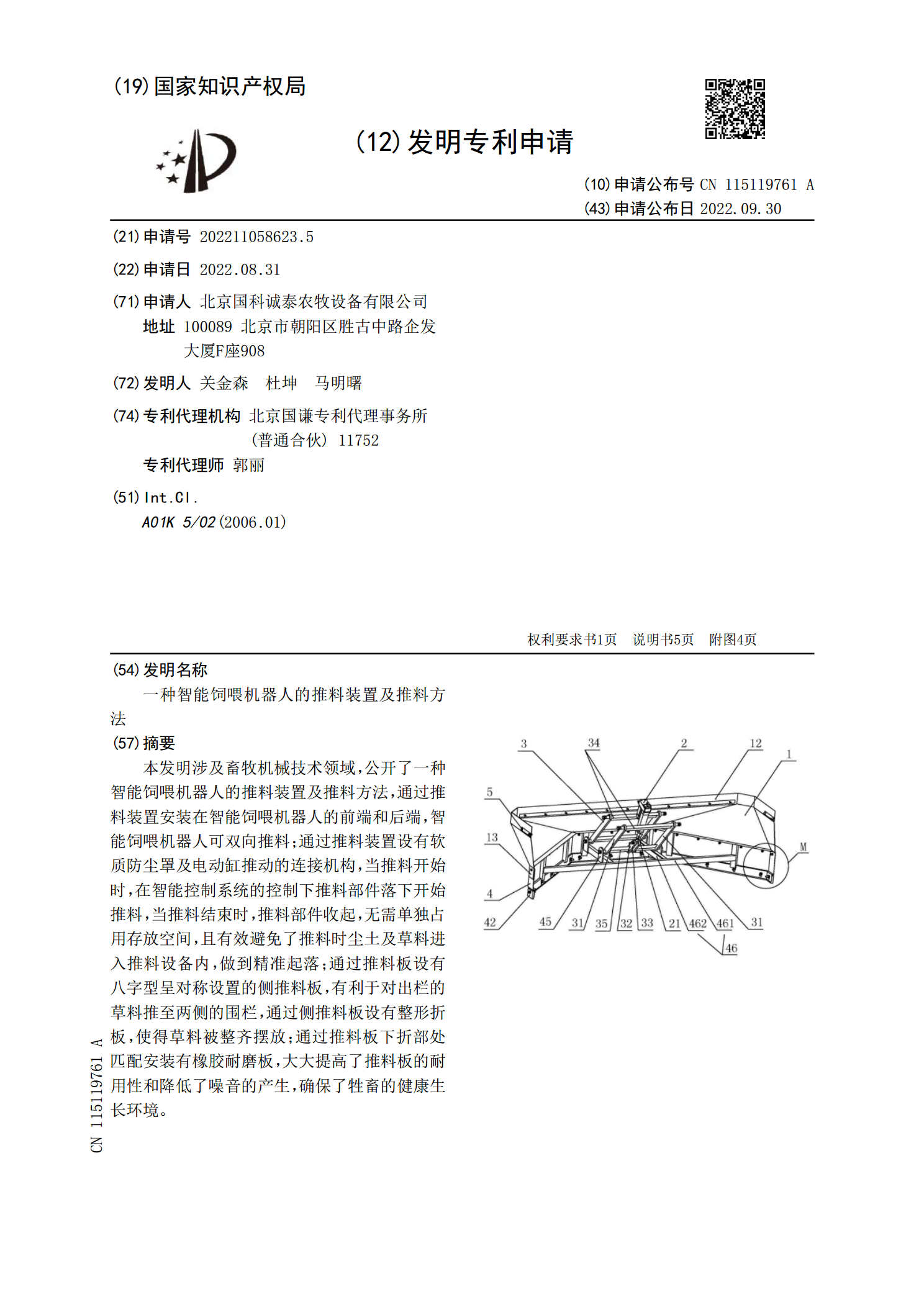
本发明涉及畜牧机械技术领域,公开了一种智能饲喂机器人的推料装置及推料方法,通过推料装置安装在智能饲喂机器人的前端和后端,智能饲喂机器人可双向推料;通过推料装置设有软质防尘罩及电动缸推动的连接机构,当推料开始时,在智能控制系统的控制下推料部件落下开始推料,当推料结束时,推料部件收起,无需单独占用存放空间,且有效避免了推料时尘土及草料进入推料设备内,做到精准起落;通过推料板设有八字型呈对称设置的侧推料板,有利于对出栏的草料推至两侧的围栏,通过侧推料板设有整形折板,使得草料被整齐摆放;通过推料板下折部处匹配安装
一种自走推料机器人.pdf
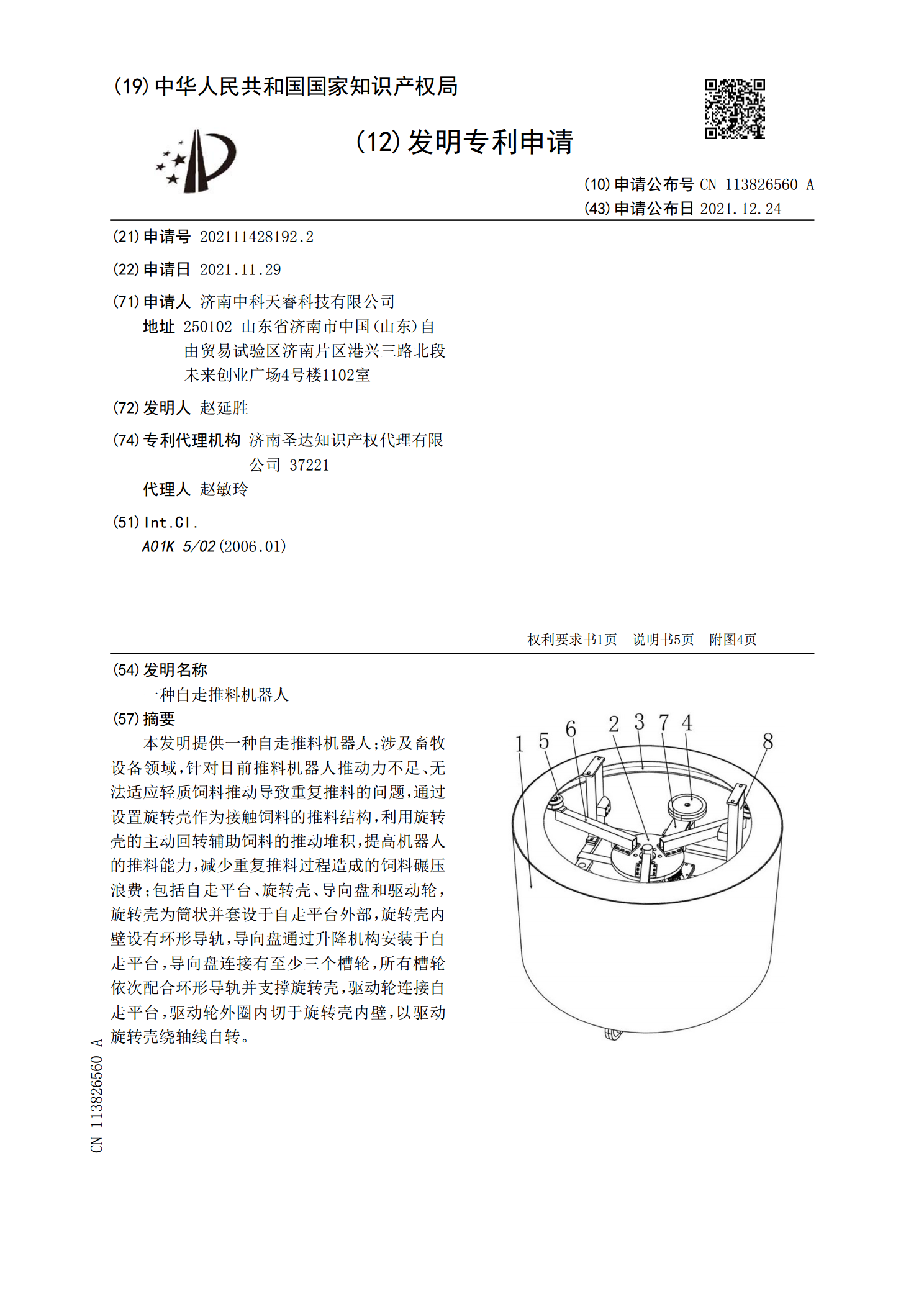
本发明提供一种自走推料机器人;涉及畜牧设备领域,针对目前推料机器人推动力不足、无法适应轻质饲料推动导致重复推料的问题,通过设置旋转壳作为接触饲料的推料结构,利用旋转壳的主动回转辅助饲料的推动堆积,提高机器人的推料能力,减少重复推料过程造成的饲料碾压浪费;包括自走平台、旋转壳、导向盘和驱动轮,旋转壳为筒状并套设于自走平台外部,旋转壳内壁设有环形导轨,导向盘通过升降机构安装于自走平台,导向盘连接有至少三个槽轮,所有槽轮依次配合环形导轨并支撑旋转壳,驱动轮连接自走平台,驱动轮外圈内切于旋转壳内壁,以驱动旋转壳绕

一种便于爬坡的推料机器人.pdf
本发明公开了一种便于爬坡的推料机器人,包括主体支架和旋转组件;所述的主体支架包括底架和通过连接板与底架相连的上盖;底架上装有两个驱动轮及一个万向轮,每个驱动轮均通过传动部件与各自的驱动电机相连;所述的旋转组件包括外表面与上盖下端内壁相配的旋转壳、若干个固定在旋转壳内壁的环架和设置于旋转壳内的活动支架,所述活动支架的中部设有一套接在丝杆上的丝杆螺母,所述丝杆的一端与伺服电机相连,另一端与底架相连;活动支架的圆周边缘处设有若干个周转滑轮,周转滑轮的外周抵接在旋转壳的内表面上,活动支架通过一固定连接件与旋转组件

一种机器人驱动的撒料装置.pdf
本发明提供一种机器人驱动的撒料装置,属于自动装甑系统机械设备技术领域。该机器人驱动的撒料装置包括机器人(10)、第一送料机(2)、第二送料机(7)、第一回转支承(3)、第二回转支承(6)和撒料筒(9),第一送料机(2)的底部固定有支撑架(5),第二送料机(7)的一端位于第一送料机(2)的第一端的正下方,并通过第二回转支承(6)连接在支撑架(5)上,第二送料机(7)的另一端与撒料筒(9)相连通,第二送料机(7)上固定有连接架(8),连接架(8)有间隙的环抱住撒料筒(9),撒料筒(9)的顶部与机器人(10)相