
一种基于边缘微服务协作的实时路径规划方法.pdf

睿达****的的

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于边缘微服务协作的实时路径规划方法.pdf
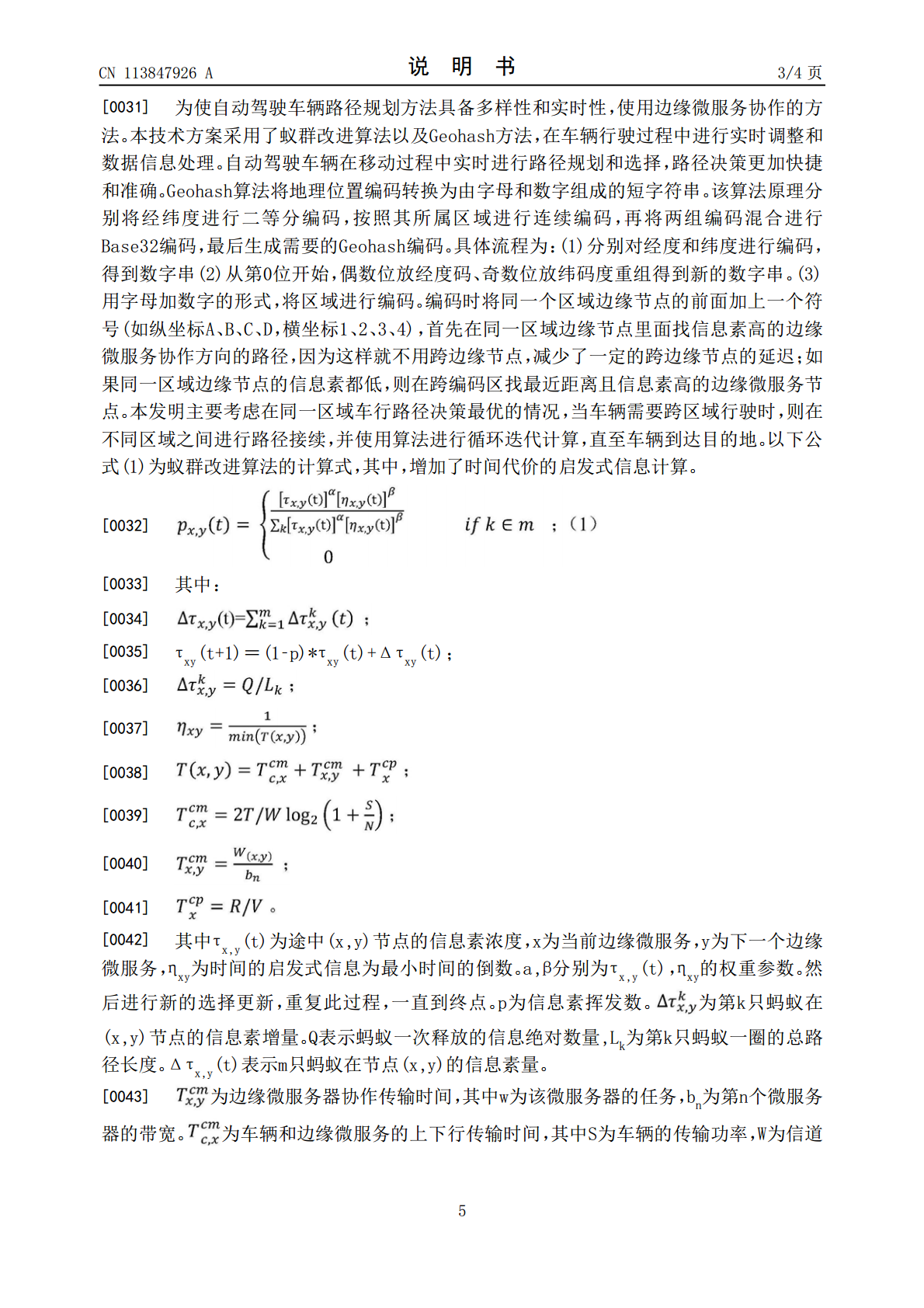
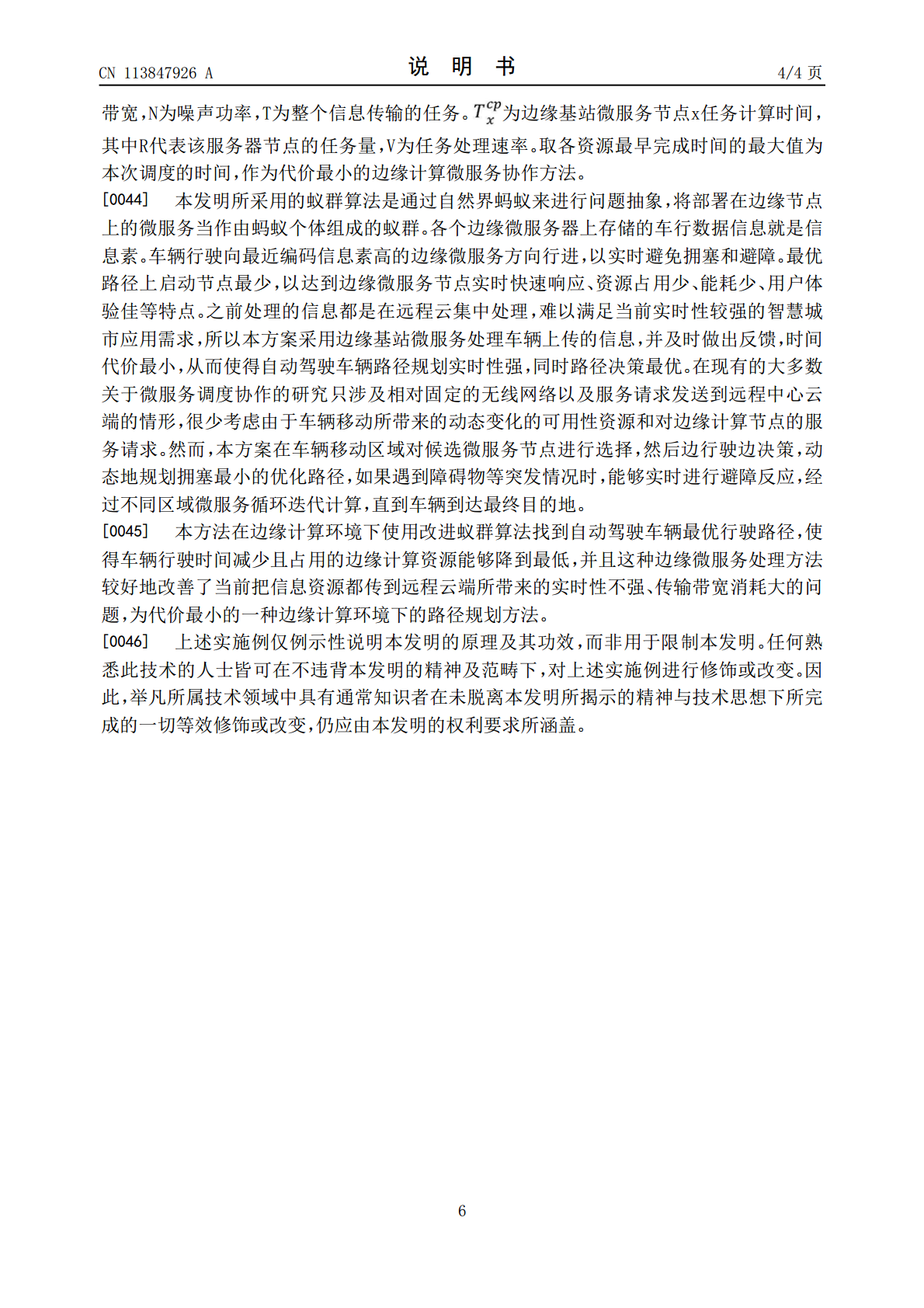
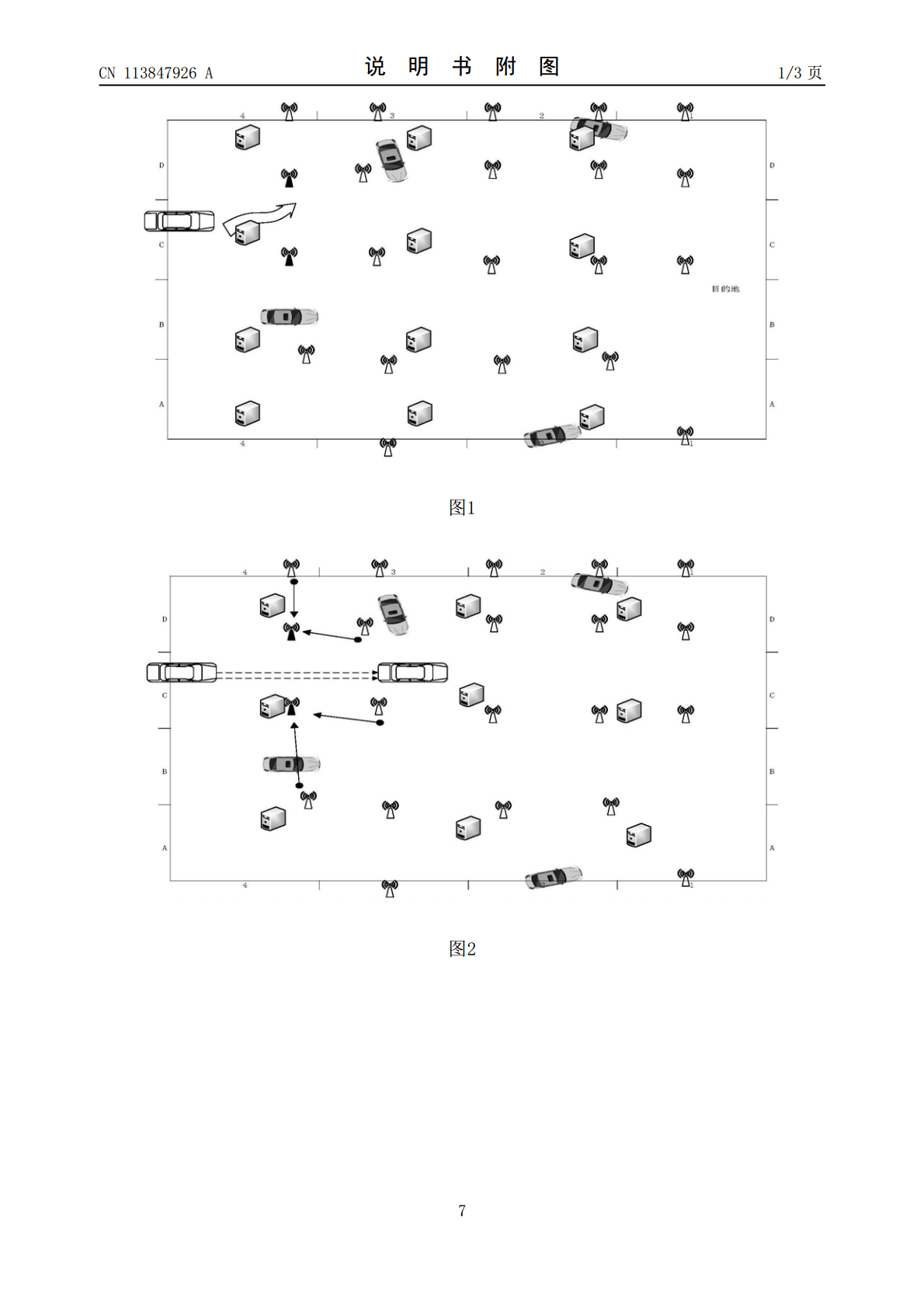
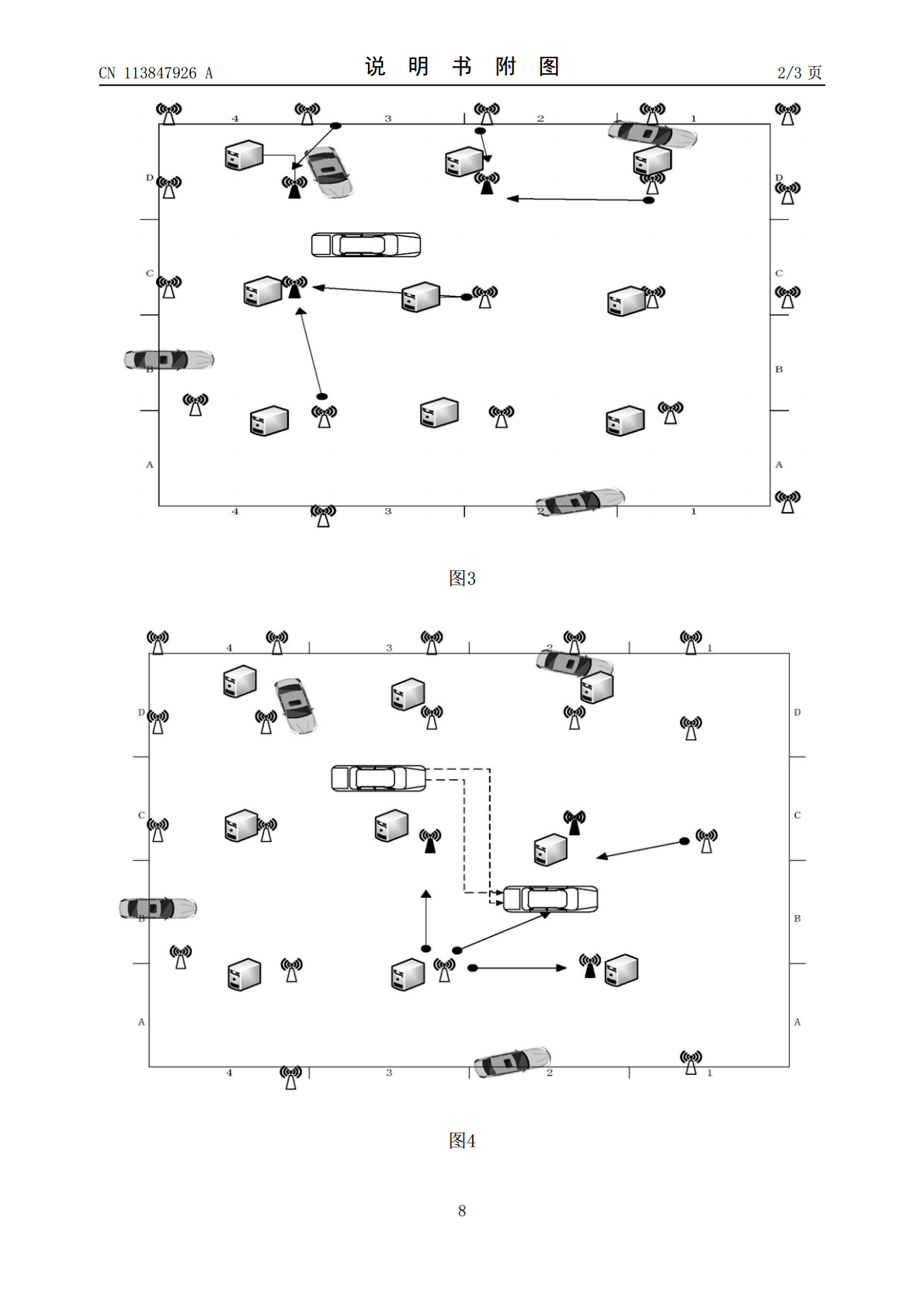
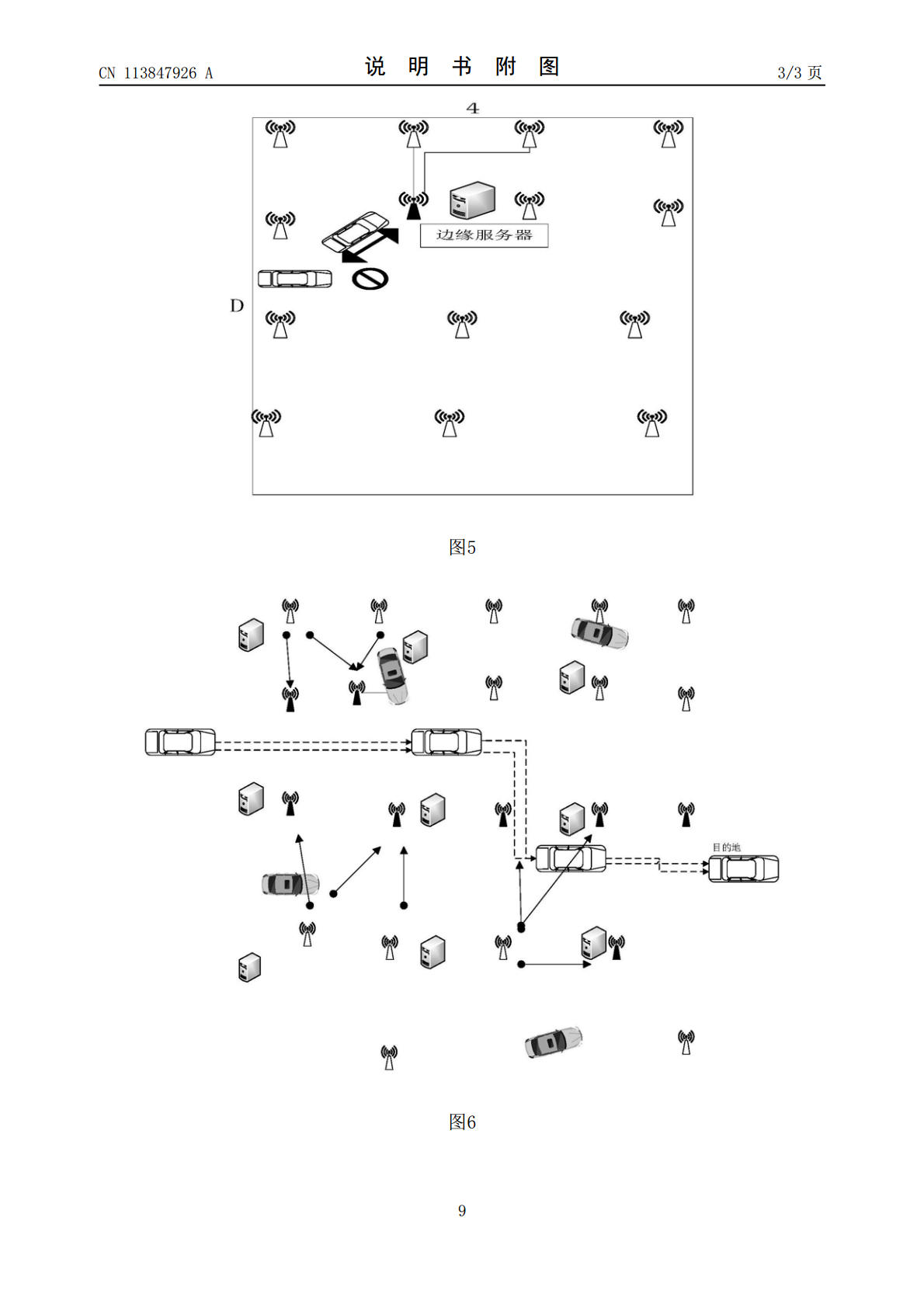
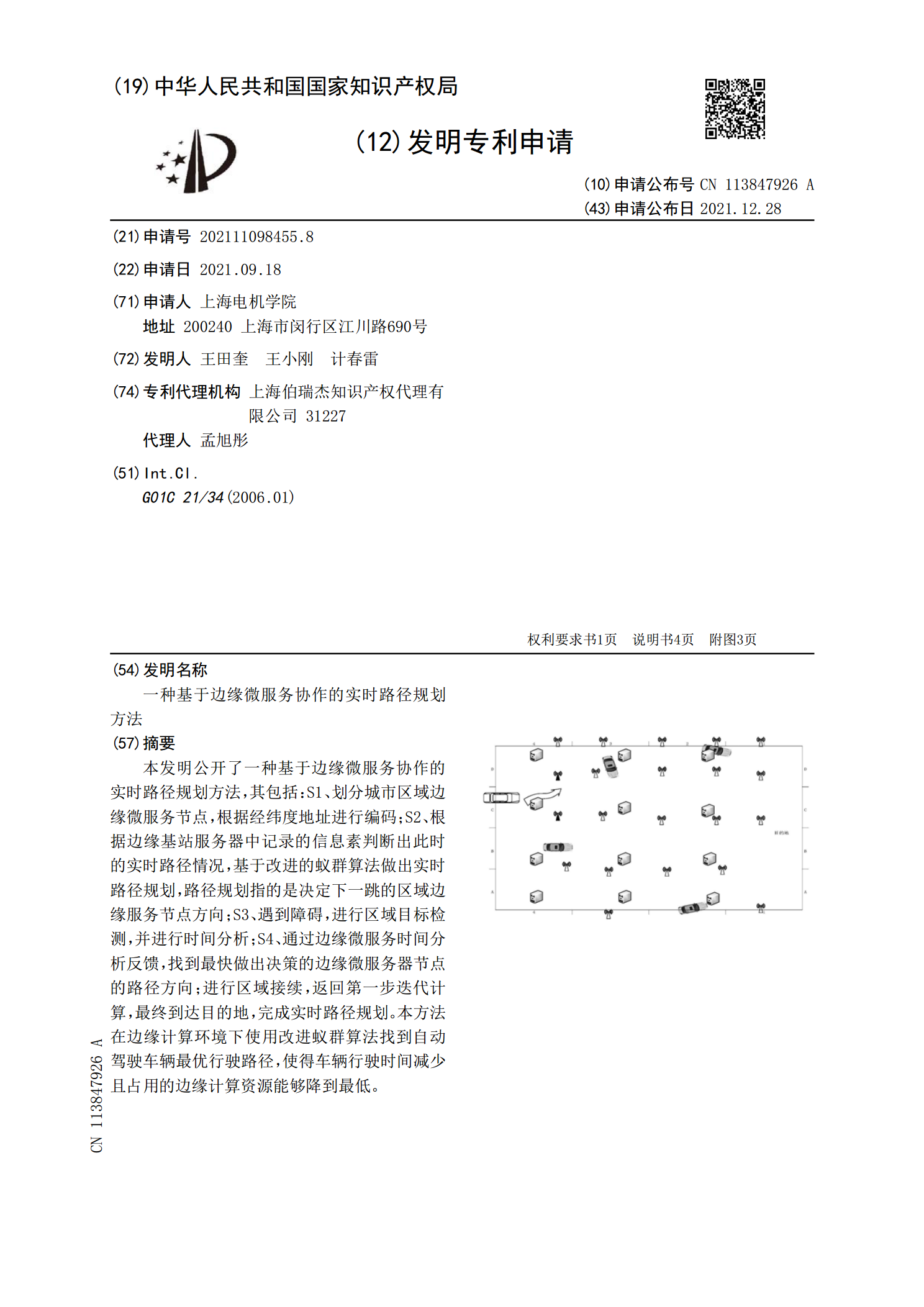
本发明公开了一种基于边缘微服务协作的实时路径规划方法,其包括:S1、划分城市区域边缘微服务节点,根据经纬度地址进行编码;S2、根据边缘基站服务器中记录的信息素判断出此时的实时路径情况,基于改进的蚁群算法做出实时路径规划,路径规划指的是决定下一跳的区域边缘服务节点方向;S3、遇到障碍,进行区域目标检测,并进行时间分析;S4、通过边缘微服务时间分析反馈,找到最快做出决策的边缘微服务器节点的路径方向;进行区域接续,返回第一步迭代计算,最终到达目的地,完成实时路径规划。本方法在边缘计算环境下使用改进蚁群算法找到自
一种基于拥塞控制的实时路径规划方法.pdf
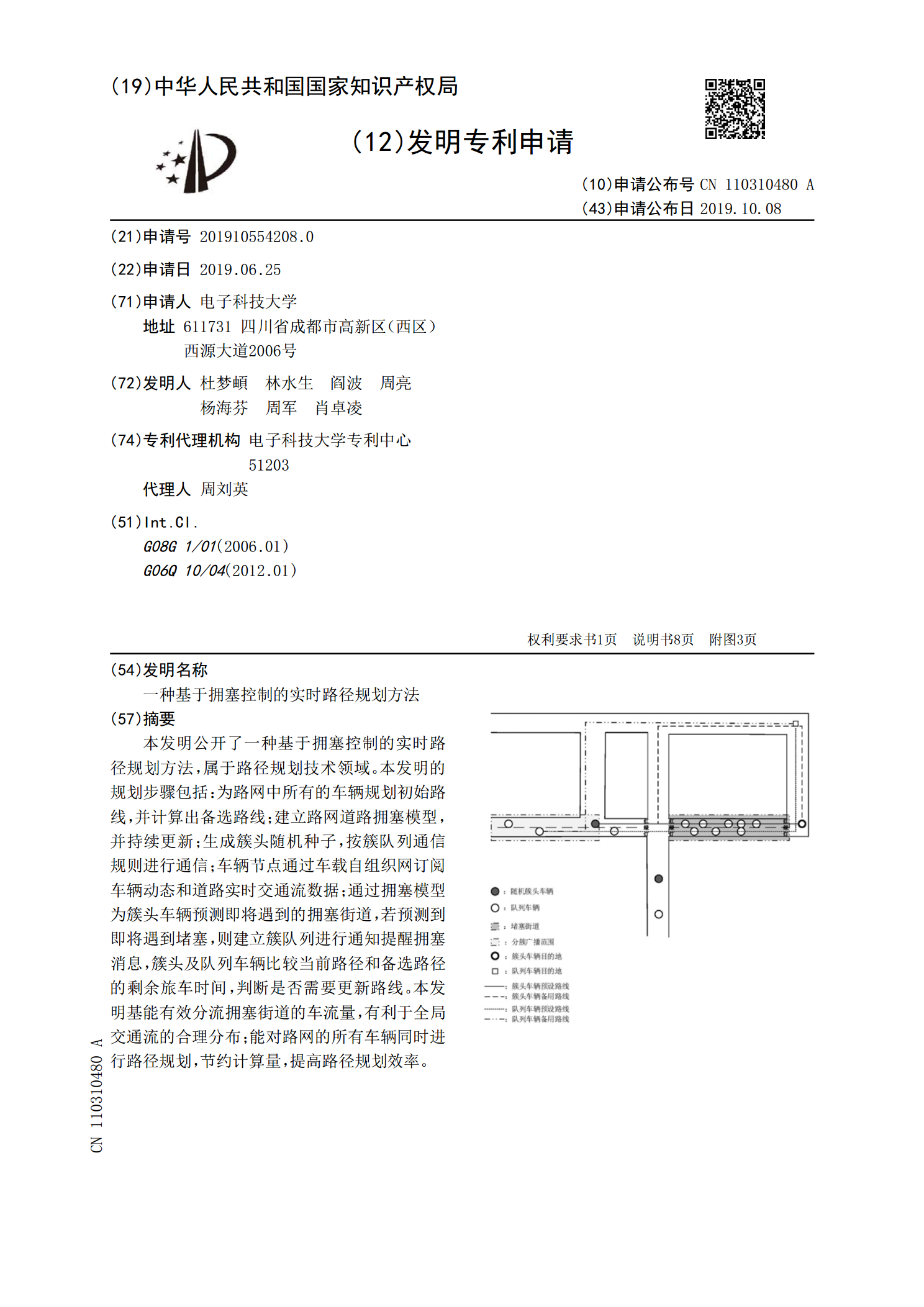
本发明公开了一种基于拥塞控制的实时路径规划方法,属于路径规划技术领域。本发明的规划步骤包括:为路网中所有的车辆规划初始路线,并计算出备选路线;建立路网道路拥塞模型,并持续更新;生成簇头随机种子,按簇队列通信规则进行通信;车辆节点通过车载自组织网订阅车辆动态和道路实时交通流数据;通过拥塞模型为簇头车辆预测即将遇到的拥塞街道,若预测到即将遇到堵塞,则建立簇队列进行通知提醒拥塞消息,簇头及队列车辆比较当前路径和备选路径的剩余旅车时间,判断是否需要更新路线。本发明基能有效分流拥塞街道的车流量,有利于全局交通流的合
一种基于曲率滤波的图像边缘实时提取方法.pdf
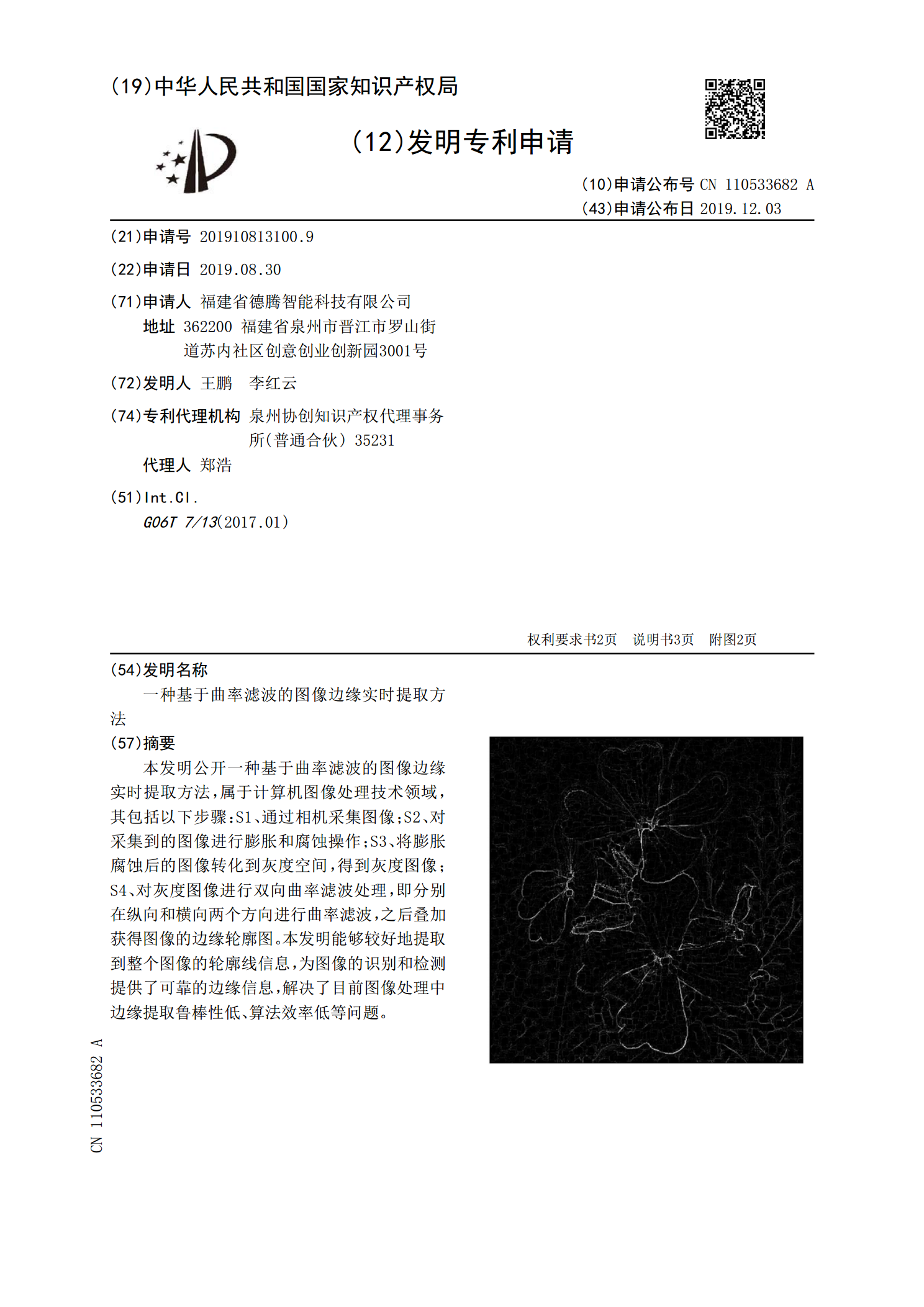
本发明公开一种基于曲率滤波的图像边缘实时提取方法,属于计算机图像处理技术领域,其包括以下步骤:S1、通过相机采集图像;S2、对采集到的图像进行膨胀和腐蚀操作;S3、将膨胀腐蚀后的图像转化到灰度空间,得到灰度图像;S4、对灰度图像进行双向曲率滤波处理,即分别在纵向和横向两个方向进行曲率滤波,之后叠加获得图像的边缘轮廓图。本发明能够较好地提取到整个图像的轮廓线信息,为图像的识别和检测提供了可靠的边缘信息,解决了目前图像处理中边缘提取鲁棒性低、算法效率低等问题。
一种基于深度学习的减材制造实时刀具路径规划方法.pdf
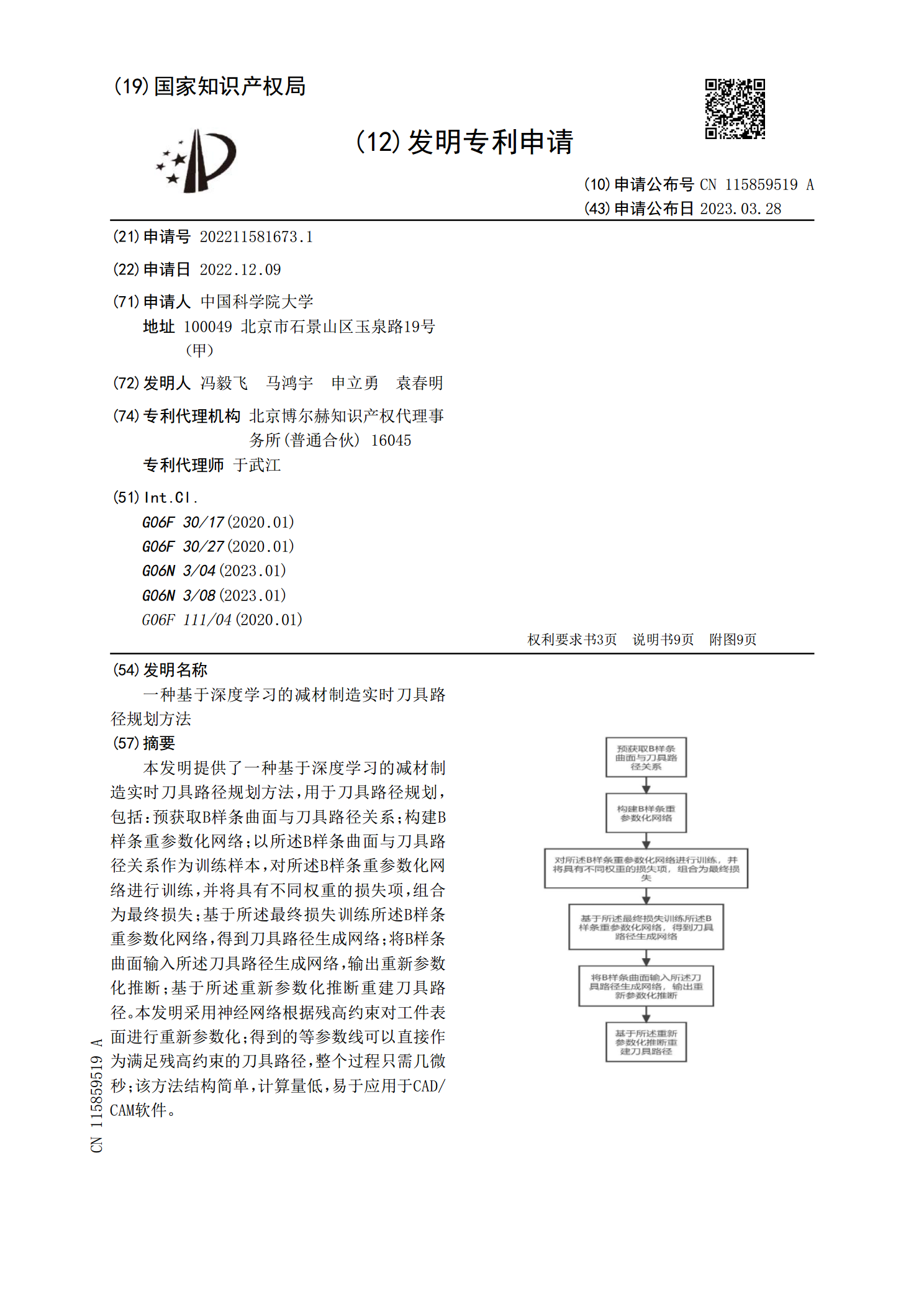
本发明提供了一种基于深度学习的减材制造实时刀具路径规划方法,用于刀具路径规划,包括:预获取B样条曲面与刀具路径关系;构建B样条重参数化网络;以所述B样条曲面与刀具路径关系作为训练样本,对所述B样条重参数化网络进行训练,并将具有不同权重的损失项,组合为最终损失;基于所述最终损失训练所述B样条重参数化网络,得到刀具路径生成网络;将B样条曲面输入所述刀具路径生成网络,输出重新参数化推断;基于所述重新参数化推断重建刀具路径。本发明采用神经网络根据残高约束对工件表面进行重新参数化;得到的等参数线可以直接作为满足残高
一种基于边缘计算的视频流实时云渲染方法.pdf
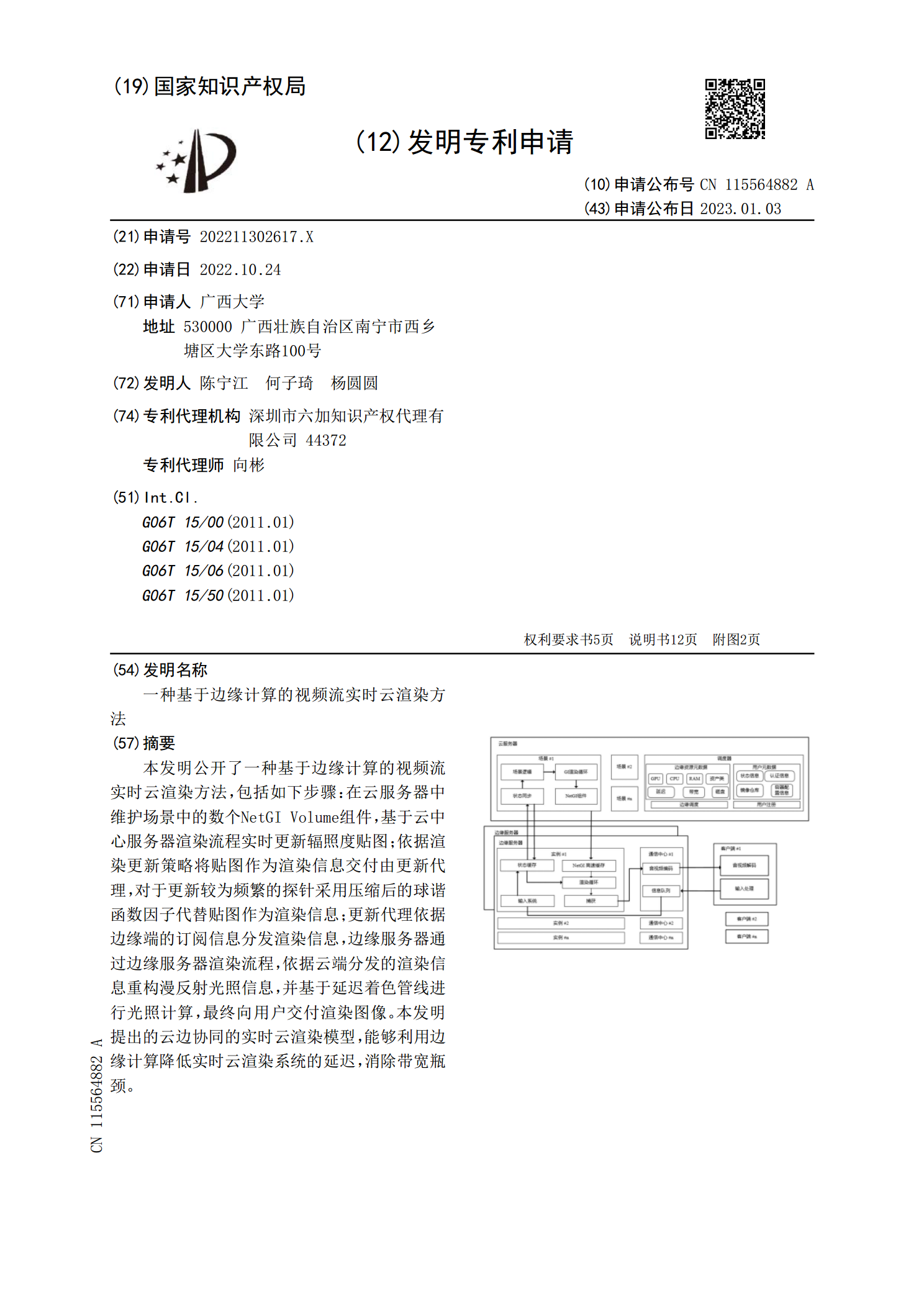
本发明公开了一种基于边缘计算的视频流实时云渲染方法,包括如下步骤:在云服务器中维护场景中的数个NetGIVolume组件,基于云中心服务器渲染流程实时更新辐照度贴图;依据渲染更新策略将贴图作为渲染信息交付由更新代理,对于更新较为频繁的探针采用压缩后的球谐函数因子代替贴图作为渲染信息;更新代理依据边缘端的订阅信息分发渲染信息,边缘服务器通过边缘服务器渲染流程,依据云端分发的渲染信息重构漫反射光照信息,并基于延迟着色管线进行光照计算,最终向用户交付渲染图像。本发明提出的云边协同的实时云渲染模型,能够利用边缘