
一种基于拥塞控制的实时路径规划方法.pdf

一只****iu

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于拥塞控制的实时路径规划方法.pdf
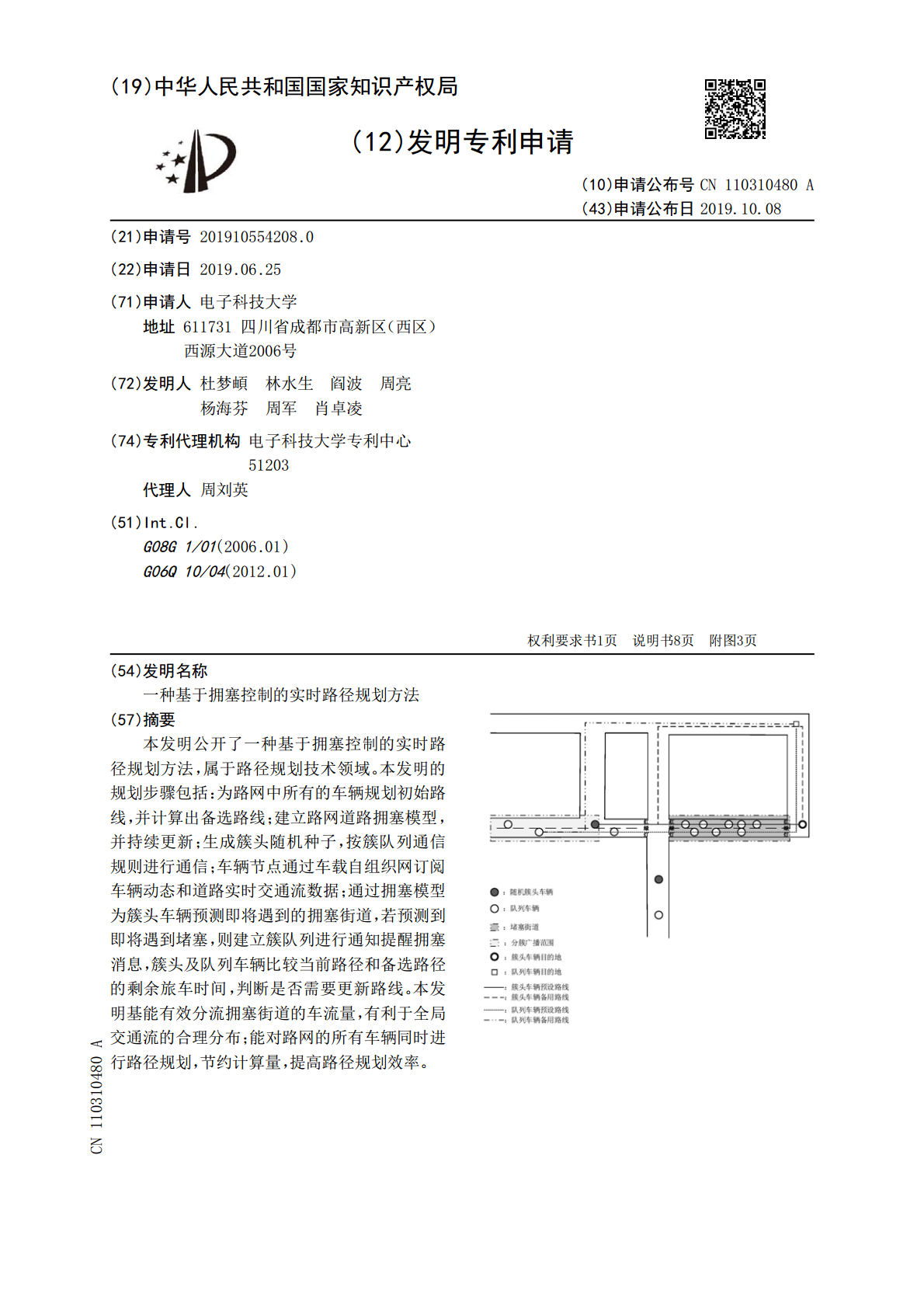
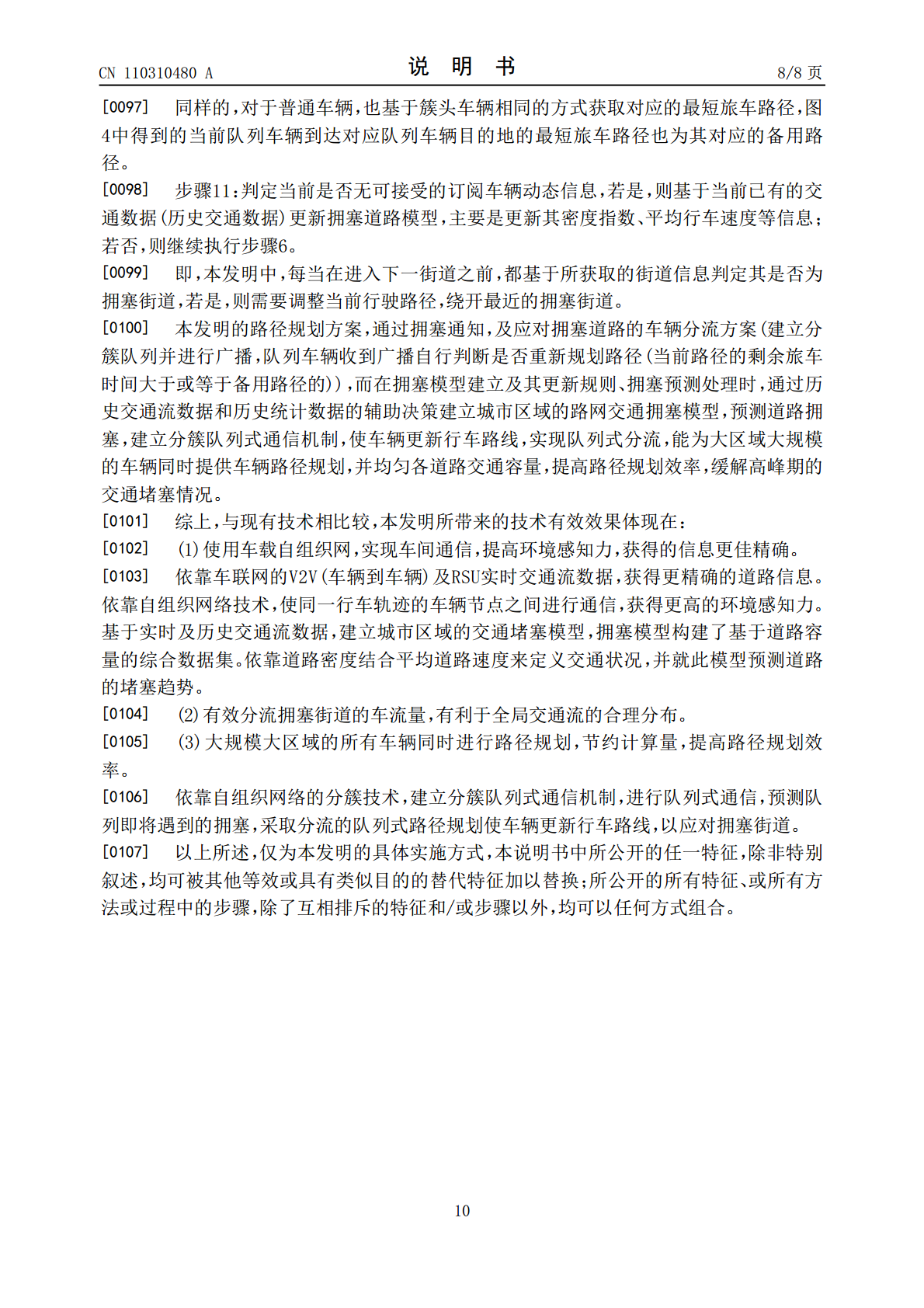
本发明公开了一种基于拥塞控制的实时路径规划方法,属于路径规划技术领域。本发明的规划步骤包括:为路网中所有的车辆规划初始路线,并计算出备选路线;建立路网道路拥塞模型,并持续更新;生成簇头随机种子,按簇队列通信规则进行通信;车辆节点通过车载自组织网订阅车辆动态和道路实时交通流数据;通过拥塞模型为簇头车辆预测即将遇到的拥塞街道,若预测到即将遇到堵塞,则建立簇队列进行通知提醒拥塞消息,簇头及队列车辆比较当前路径和备选路径的剩余旅车时间,判断是否需要更新路线。本发明基能有效分流拥塞街道的车流量,有利于全局交通流的合

基于损益评估的拥塞路径调整方法.pdf
本发明提供一种基于损益评估的拥塞路径调整方法,本着最大收益原则调整那些处于拥塞路径的流,将其调整到更合适的路径传送(其中评估调整后无明显收益的流将仍被保留在原路径传送)。在该方法基础上,本发明提供一种避免拥塞、故障路径的路由方法和系统。本发明提供了高收益重路由方案,在这些方案“聪明的”选路指导下,流量负载分配更加趋于均衡。
一种基于边缘微服务协作的实时路径规划方法.pdf
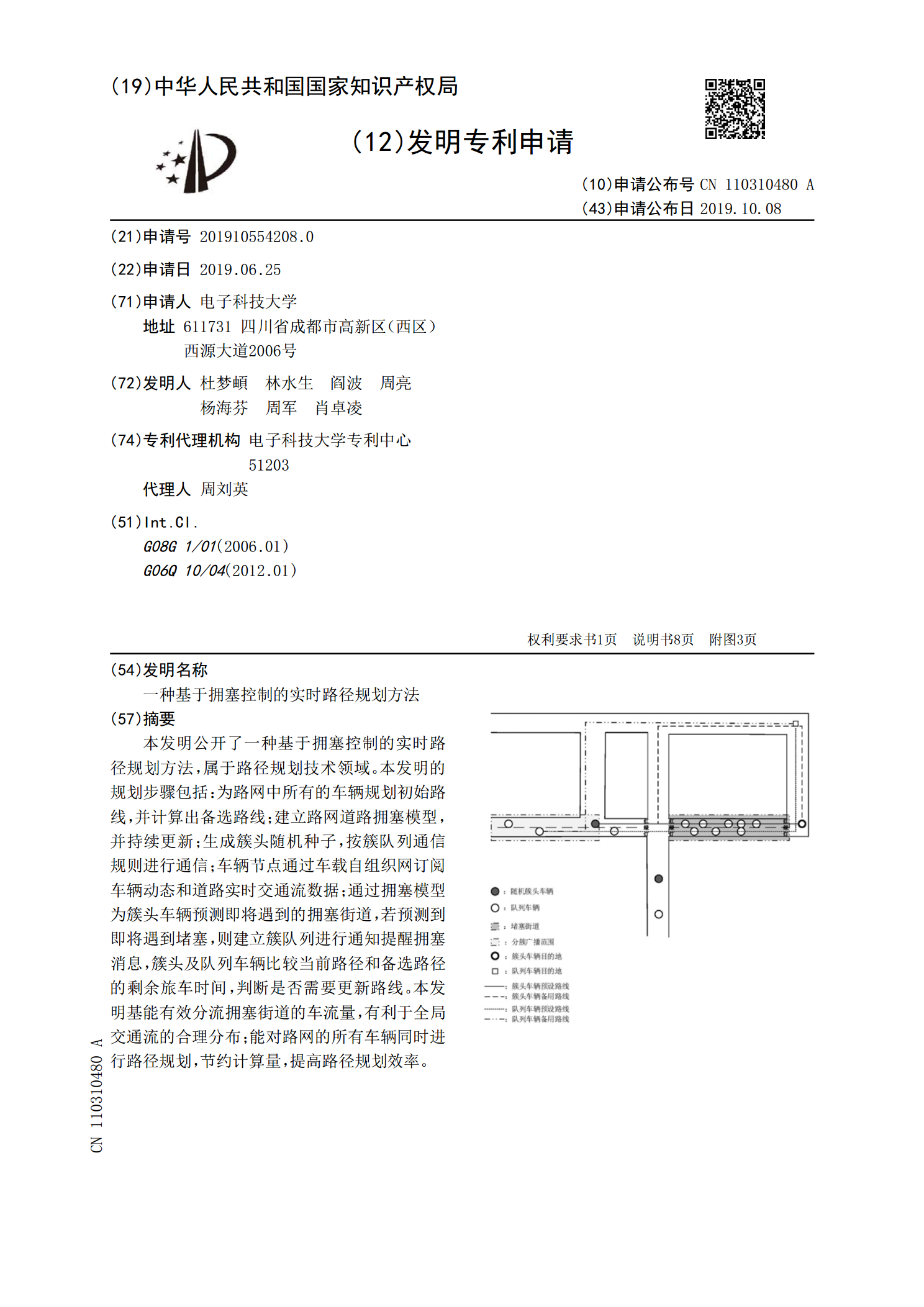
本发明公开了一种基于边缘微服务协作的实时路径规划方法,其包括:S1、划分城市区域边缘微服务节点,根据经纬度地址进行编码;S2、根据边缘基站服务器中记录的信息素判断出此时的实时路径情况,基于改进的蚁群算法做出实时路径规划,路径规划指的是决定下一跳的区域边缘服务节点方向;S3、遇到障碍,进行区域目标检测,并进行时间分析;S4、通过边缘微服务时间分析反馈,找到最快做出决策的边缘微服务器节点的路径方向;进行区域接续,返回第一步迭代计算,最终到达目的地,完成实时路径规划。本方法在边缘计算环境下使用改进蚁群算法找到自
多路径拥塞控制方法及装置.pdf
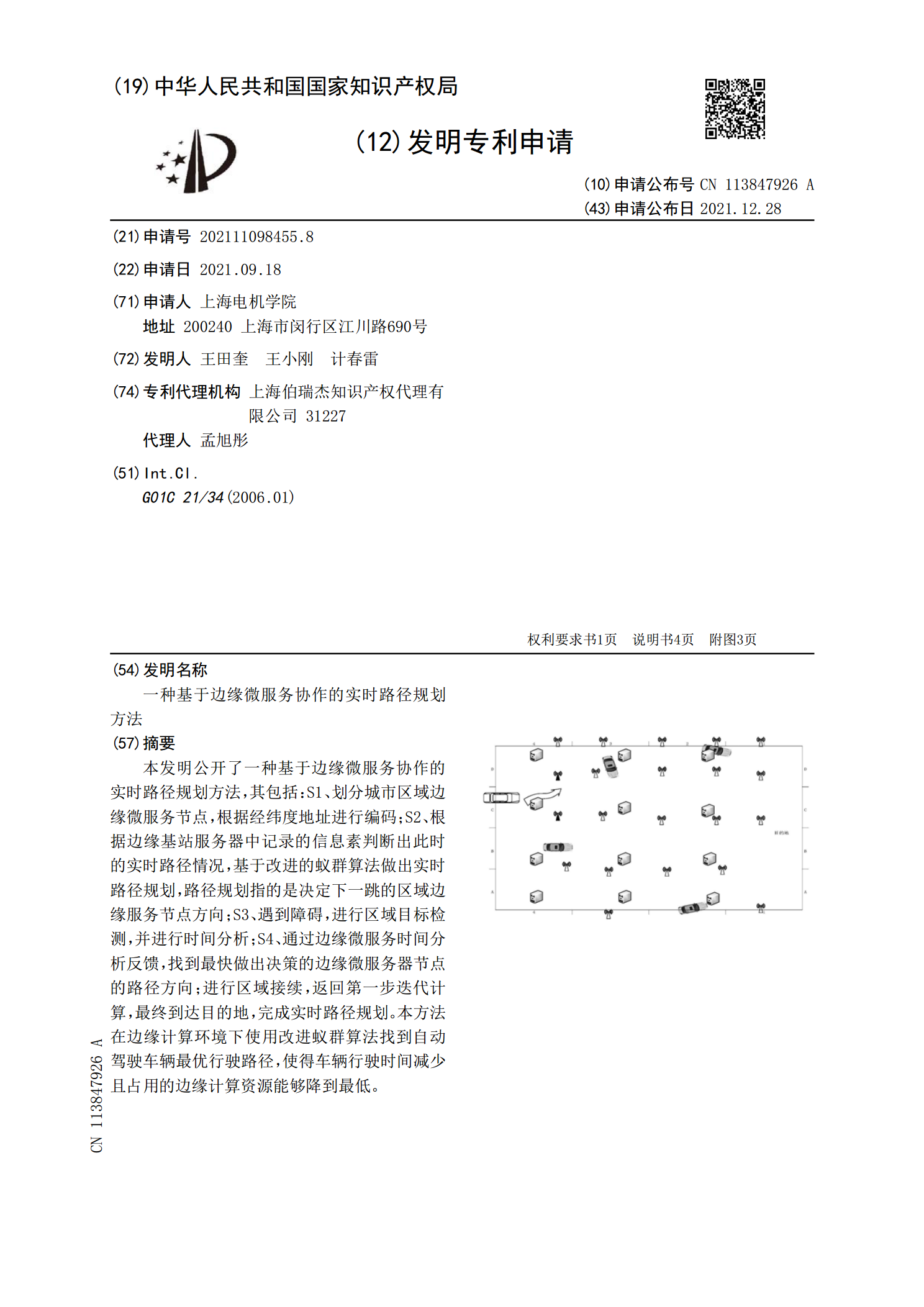
本申请提供一种多路径拥塞控制方法及装置,方法包括:实时监测基于多路径传输控制协议MPTCP的目标网络当前是否处于非阻塞状态;若目标网络当前处于非阻塞状态,则使用一个单子流强化学习模型应用于MPTCP的各个子流,对目标网络的数据传输进行符合公平性原则的拥塞控制。本申请能够实现强化学习模型DRL在基于多路径传输控制协议MPTCP的网络拥塞控制中的应用,能够有效提高多路径拥塞控制的及时性及可靠性;并能够有效避免阻塞对目标网络中数据传输性能带来的影响,提高拥塞控制的智能化程度,进而能够有效保证基于多路径传输控制协
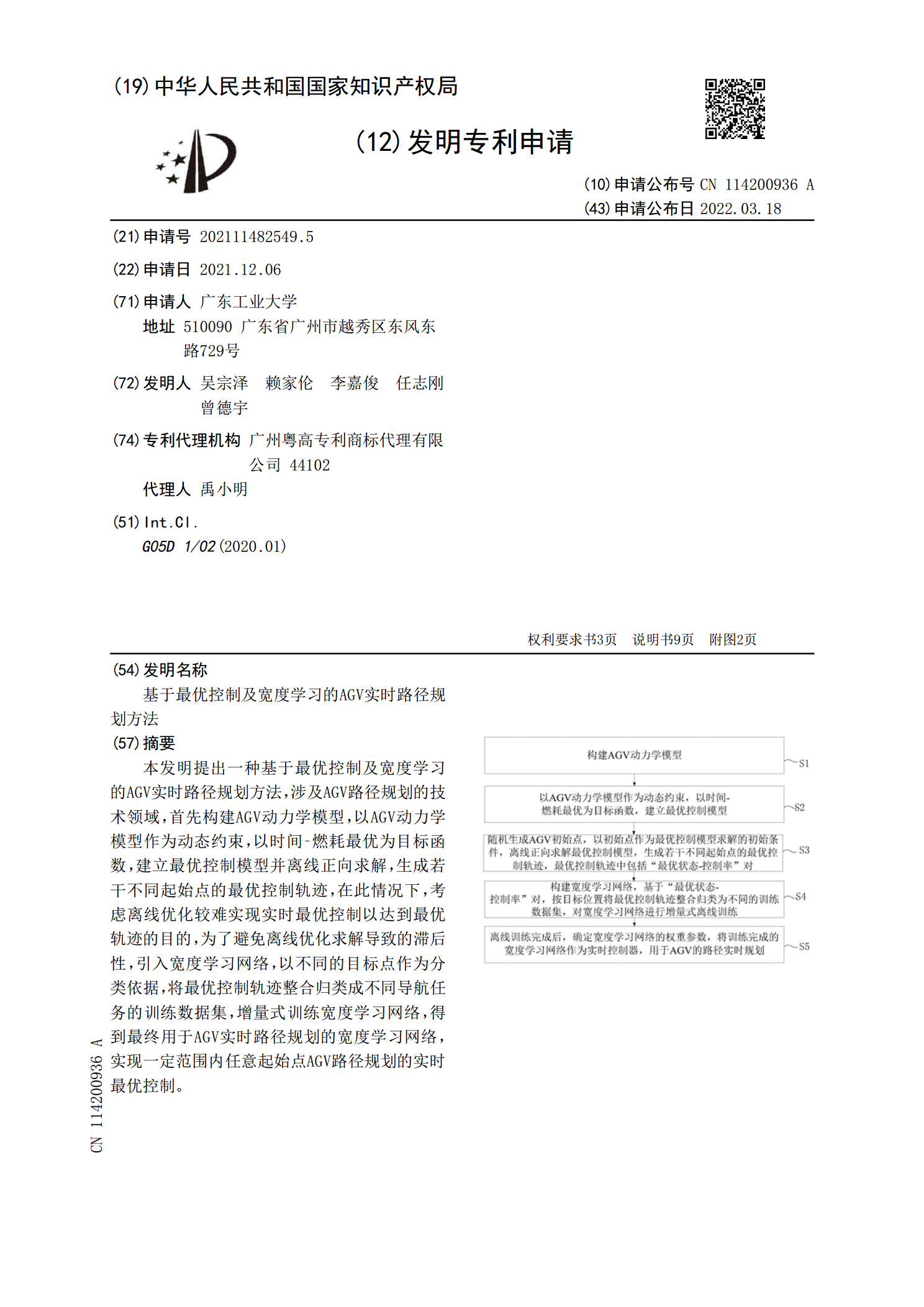
基于最优控制及宽度学习的AGV实时路径规划方法.pdf
本发明提出一种基于最优控制及宽度学习的AGV实时路径规划方法,涉及AGV路径规划的技术领域,首先构建AGV动力学模型,以AGV动力学模型作为动态约束,以时间‑燃耗最优为目标函数,建立最优控制模型并离线正向求解,生成若干不同起始点的最优控制轨迹,在此情况下,考虑离线优化较难实现实时最优控制以达到最优轨迹的目的,为了避免离线优化求解导致的滞后性,引入宽度学习网络,以不同的目标点作为分类依据,将最优控制轨迹整合归类成不同导航任务的训练数据集,增量式训练宽度学习网络,得到最终用于AGV实时路径规划的宽度学习网络,