
一种基于曲率滤波的图像边缘实时提取方法.pdf

听云****君哇

1/8
2/8

3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于曲率滤波的图像边缘实时提取方法.pdf
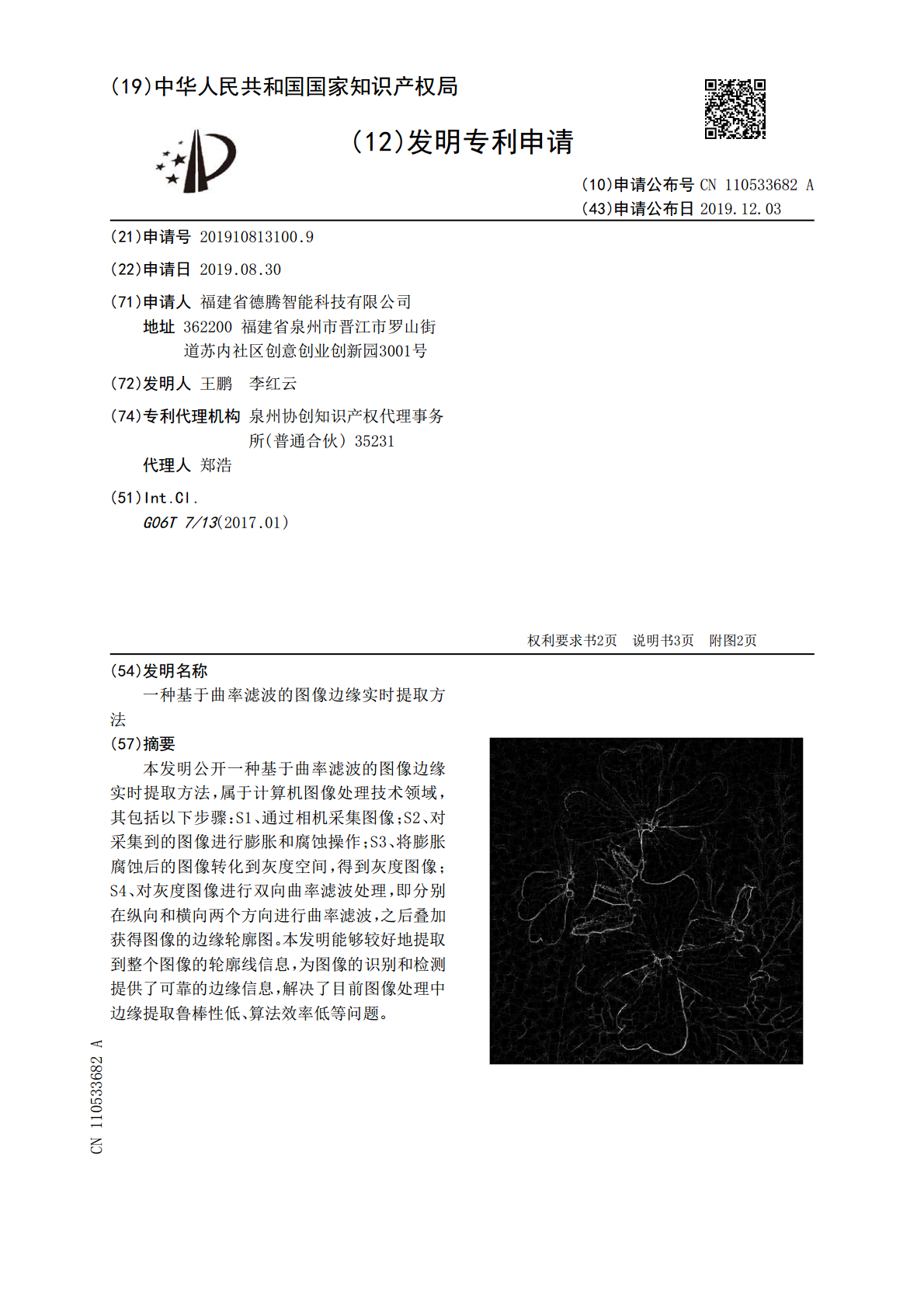
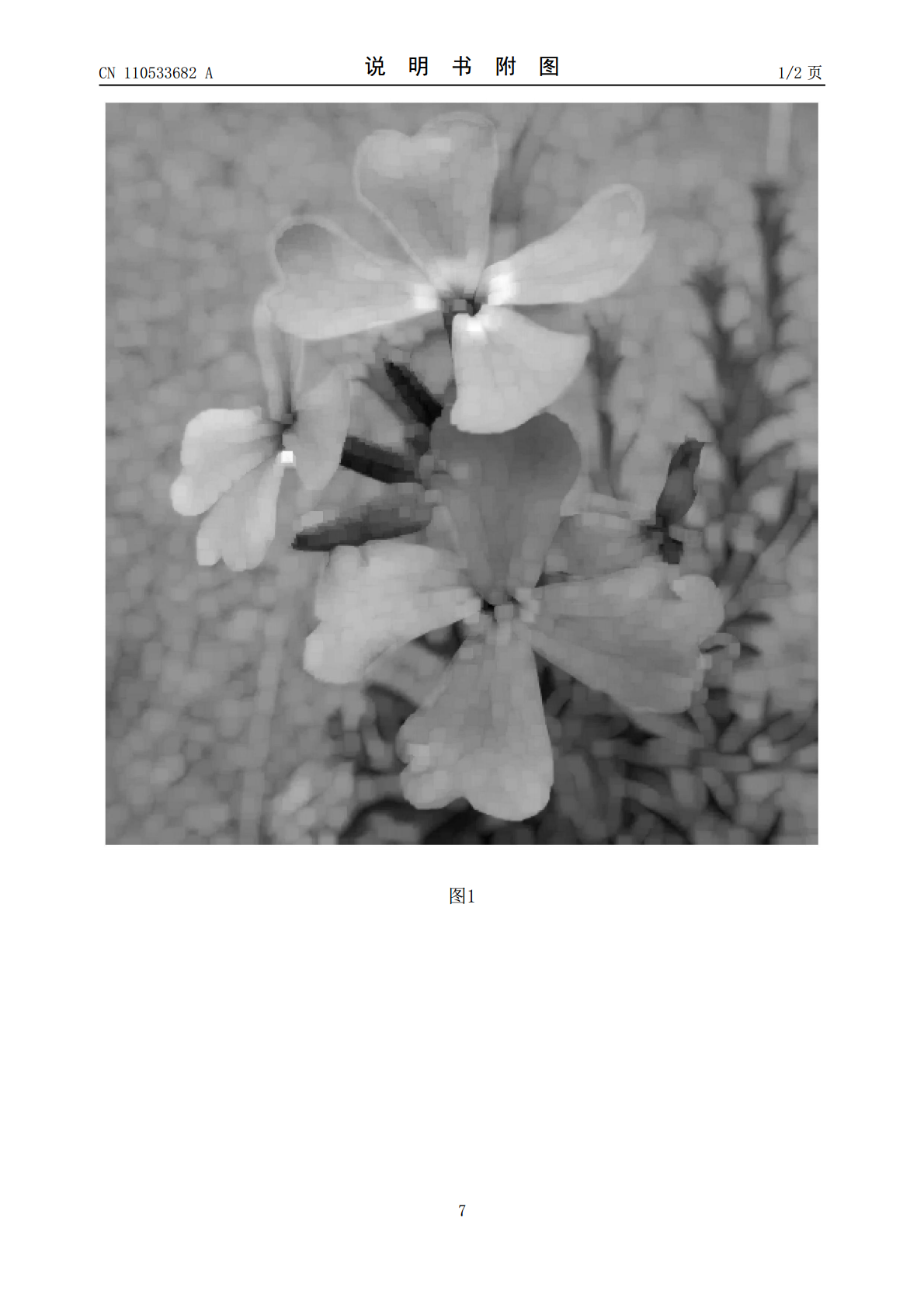
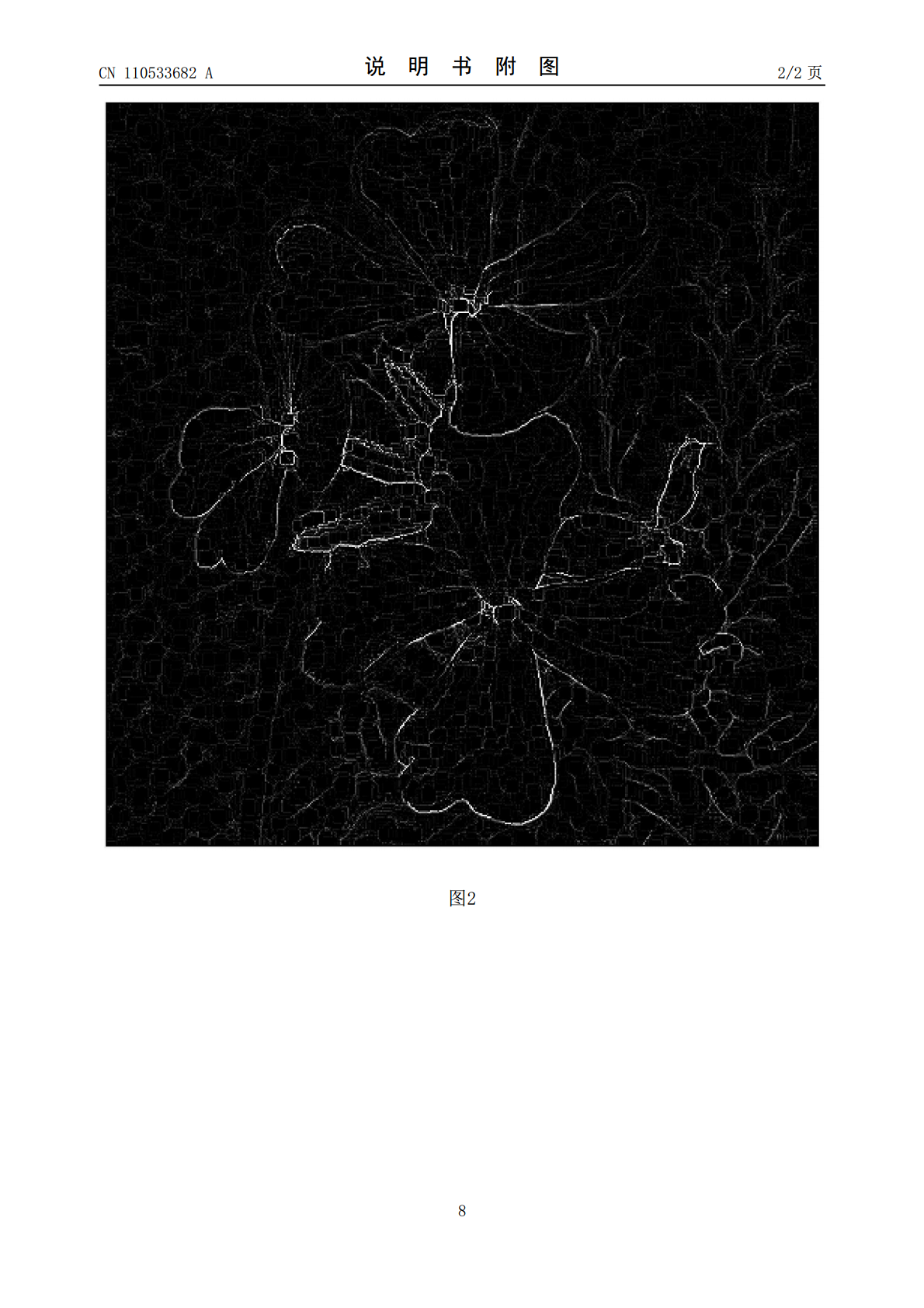
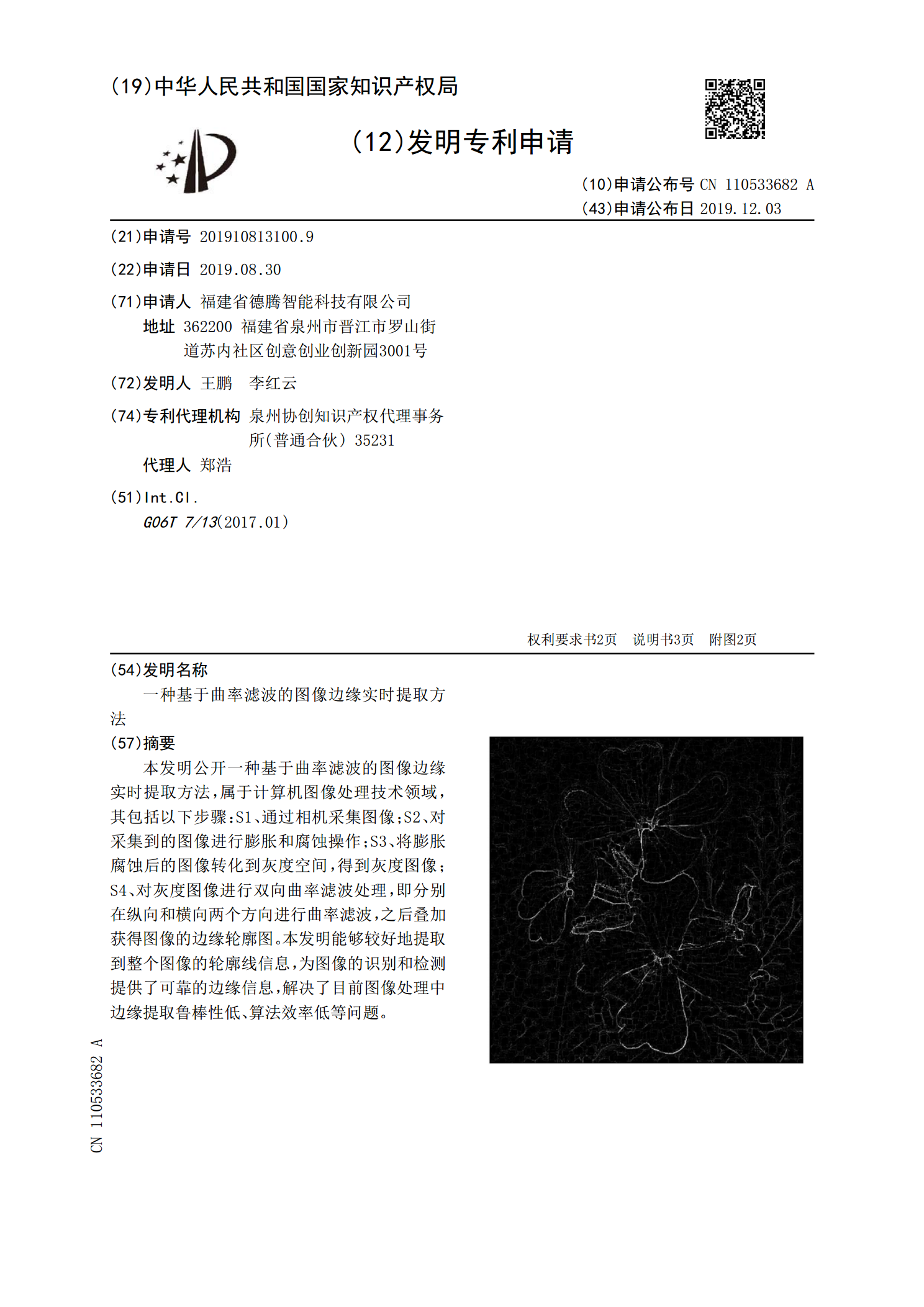
本发明公开一种基于曲率滤波的图像边缘实时提取方法,属于计算机图像处理技术领域,其包括以下步骤:S1、通过相机采集图像;S2、对采集到的图像进行膨胀和腐蚀操作;S3、将膨胀腐蚀后的图像转化到灰度空间,得到灰度图像;S4、对灰度图像进行双向曲率滤波处理,即分别在纵向和横向两个方向进行曲率滤波,之后叠加获得图像的边缘轮廓图。本发明能够较好地提取到整个图像的轮廓线信息,为图像的识别和检测提供了可靠的边缘信息,解决了目前图像处理中边缘提取鲁棒性低、算法效率低等问题。

曲率驱动扩散图像边缘形态复合滤波方法仿真.pptx
曲率驱动扩散图像边缘形态复合滤波方法仿真目录添加章节标题曲率驱动扩散图像边缘形态复合滤波方法概述曲率驱动扩散算法原理边缘形态复合滤波方法简介曲率驱动扩散与边缘形态复合滤波的结合曲率驱动扩散图像边缘形态复合滤波方法实现过程边缘检测与特征提取曲率计算与阈值设定扩散过程与边缘保护复合滤波效果评估曲率驱动扩散图像边缘形态复合滤波方法仿真结果分析仿真实验设置与参数选择仿真结果展示与对比分析方法性能评估与优缺点分析对其他图像处理方法的借鉴意义曲率驱动扩散图像边缘形态复合滤波方法应用前景展望在图像增强领域的应用前景在医

基于ROEWA和Gabor滤波的SAR图像边缘提取.docx
基于ROEWA和Gabor滤波的SAR图像边缘提取摘要合成孔径雷达(SAR)成像技术在地球观测领域中具有重要应用价值。SAR图像在物体表面形成复杂的回波信号,需要对其进行处理和解析。本文提出一种基于ROEWA和Gabor滤波的SAR图像边缘提取方法,该方法可以在SAR图像的不同角度和分辨率下实现高精度的边缘提取。并使用ENLIL人工卫星SAR图像验证了该方法的可行性和有效性。关键词:SAR图像;边缘提取;ROEWA;Gabor滤波;ENLIL卫星1.简介SAR技术具有成像能力、日夜全天候观测能力和对地物遥
基于高斯滤波与均值滤波的SAR图像边缘检测方法.pdf
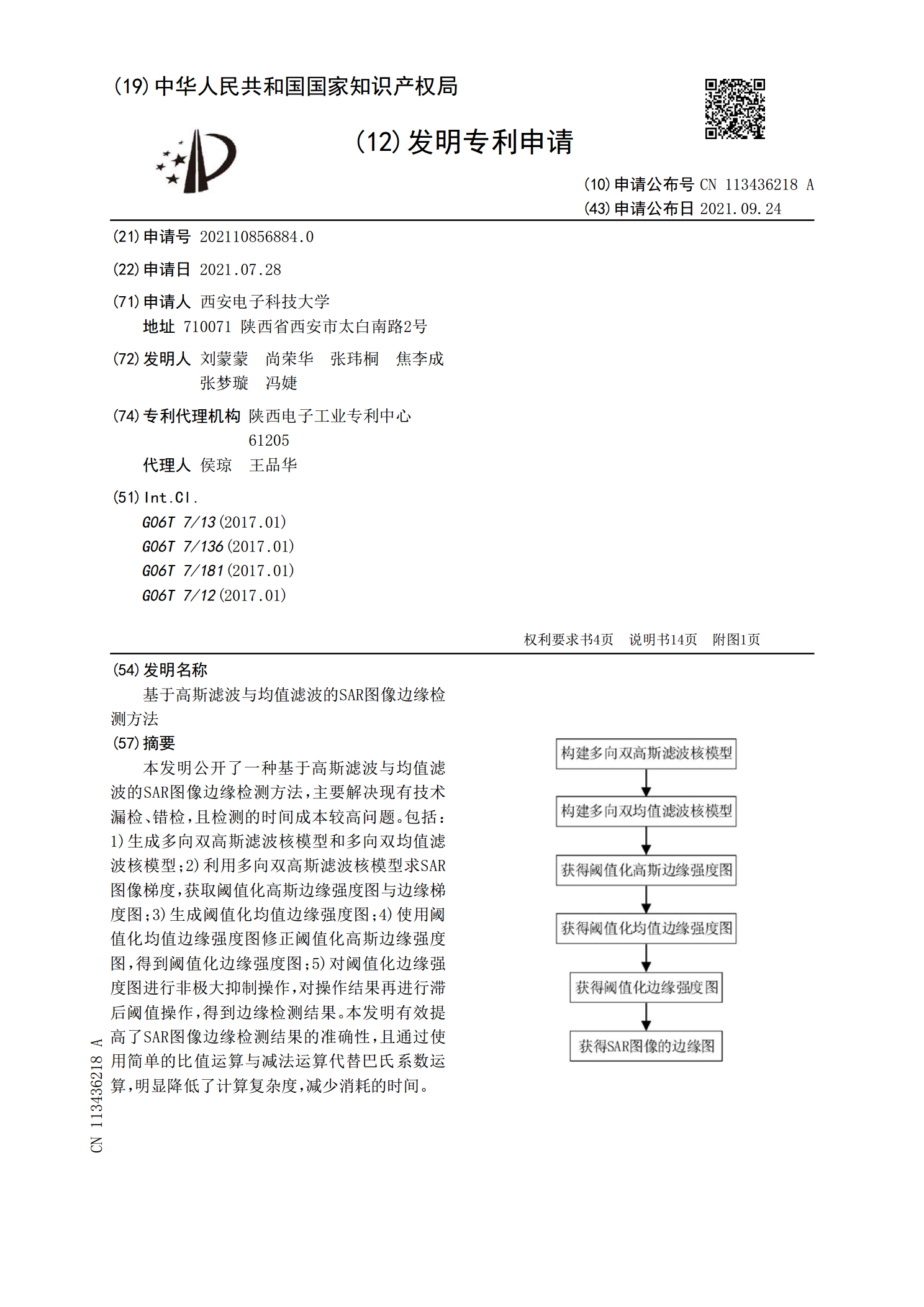
本发明公开了一种基于高斯滤波与均值滤波的SAR图像边缘检测方法,主要解决现有技术漏检、错检,且检测的时间成本较高问题。包括:1)生成多向双高斯滤波核模型和多向双均值滤波核模型;2)利用多向双高斯滤波核模型求SAR图像梯度,获取阈值化高斯边缘强度图与边缘梯度图;3)生成阈值化均值边缘强度图;4)使用阈值化均值边缘强度图修正阈值化高斯边缘强度图,得到阈值化边缘强度图;5)对阈值化边缘强度图进行非极大抑制操作,对操作结果再进行滞后阈值操作,得到边缘检测结果。本发明有效提高了SAR图像边缘检测结果的准确性,且通过

基于CNN的彩色图像边缘提取方法.docx
基于CNN的彩色图像边缘提取方法基于CNN的彩色图像边缘提取方法摘要:图像边缘提取是计算机视觉领域中一个重要的任务,对于图像分割、物体检测和人脸识别等应用具有关键作用。本论文提出了基于卷积神经网络(CNN)的彩色图像边缘提取方法。首先,介绍了CNN基本原理和结构,然后详细讨论了图像边缘的特点与确定边缘的方法。紧接着,提出了基于CNN的图像边缘提取模型,包括网络的结构设计、训练数据集的准备和训练过程。实验结果表明,基于CNN的彩色图像边缘提取方法在边缘检测准确性和鲁棒性方面具有优势,可以应用于多种计算机视觉