
一种基于深度学习的减材制造实时刀具路径规划方法.pdf

努力****冰心

1/10

2/10
3/10

4/10
5/10
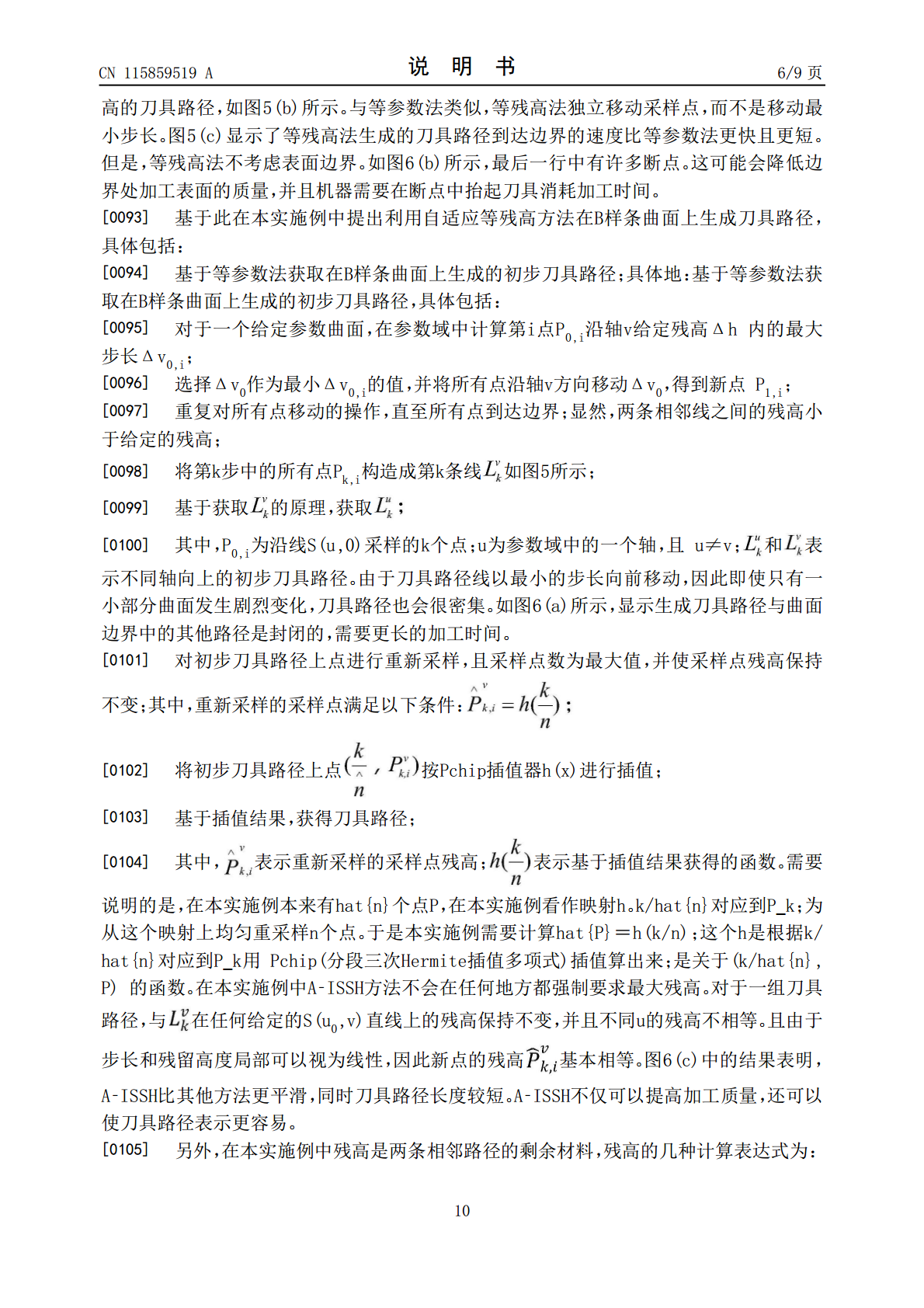
6/10

7/10

8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于深度学习的减材制造实时刀具路径规划方法.pdf
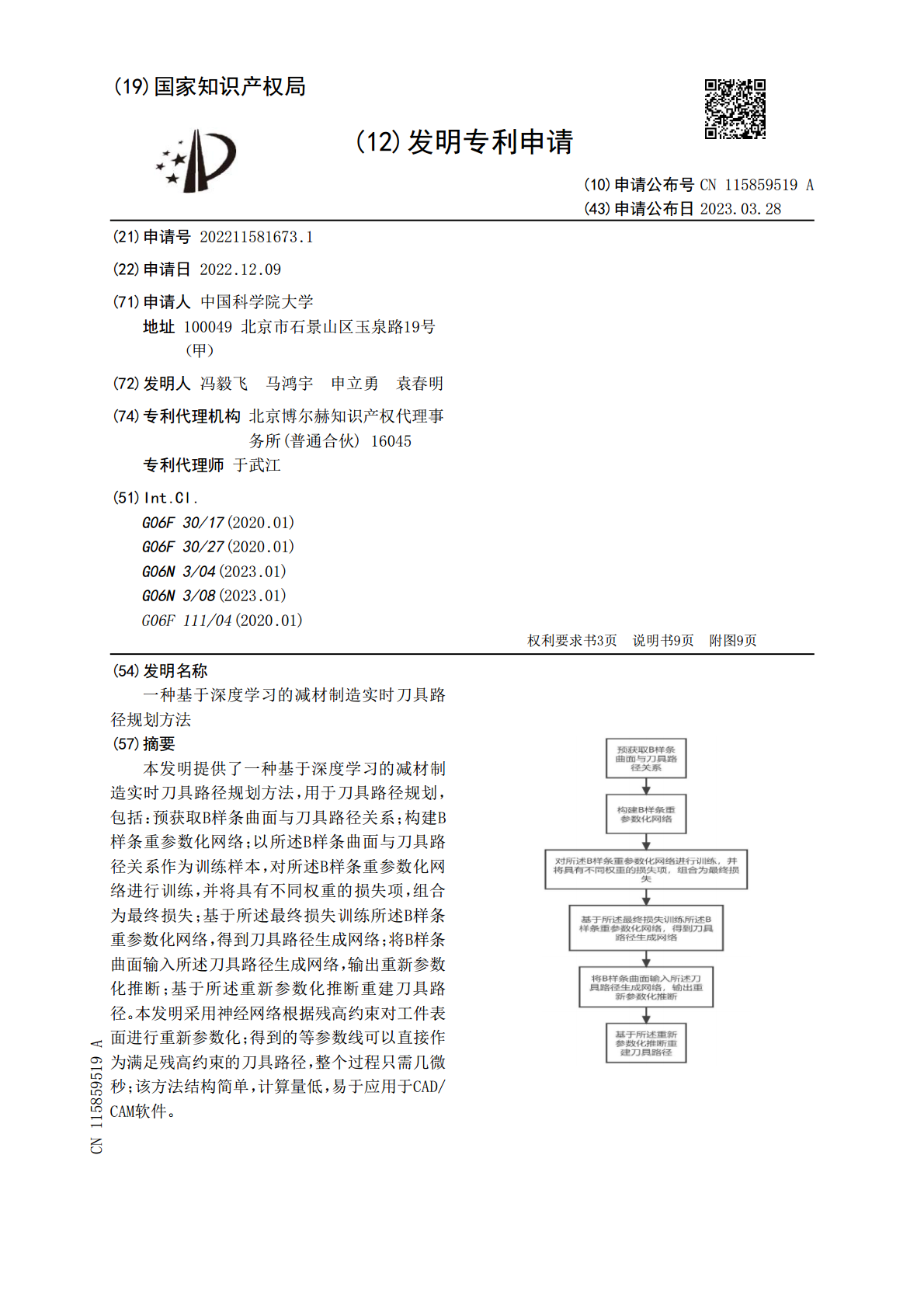
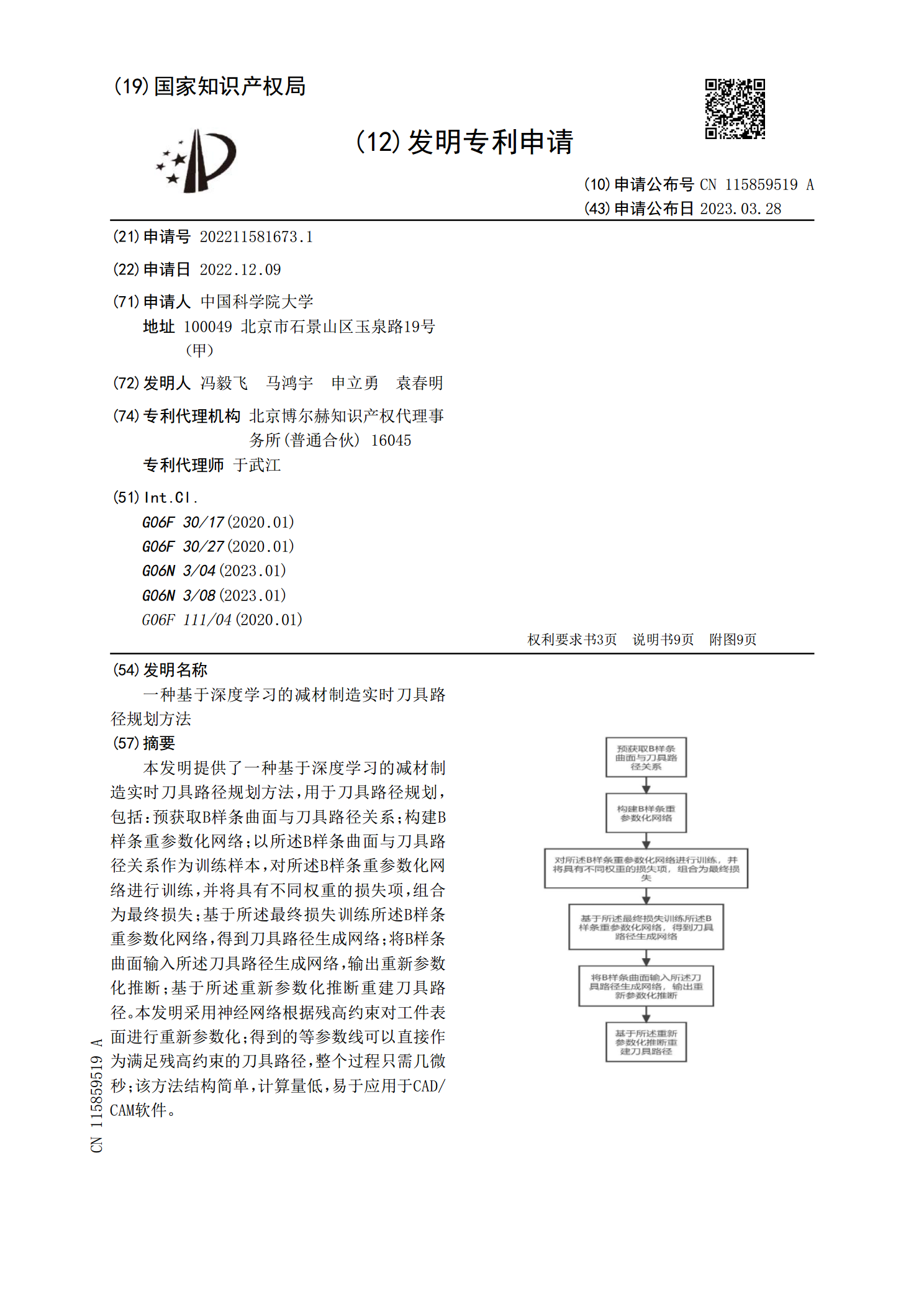
本发明提供了一种基于深度学习的减材制造实时刀具路径规划方法,用于刀具路径规划,包括:预获取B样条曲面与刀具路径关系;构建B样条重参数化网络;以所述B样条曲面与刀具路径关系作为训练样本,对所述B样条重参数化网络进行训练,并将具有不同权重的损失项,组合为最终损失;基于所述最终损失训练所述B样条重参数化网络,得到刀具路径生成网络;将B样条曲面输入所述刀具路径生成网络,输出重新参数化推断;基于所述重新参数化推断重建刀具路径。本发明采用神经网络根据残高约束对工件表面进行重新参数化;得到的等参数线可以直接作为满足残高

基于深度强化学习的巡天望远镜实时路径规划方法.pdf
本发明涉及巡天望远镜智能控制,使用望远镜进行天文观测,潜在观测的质量随着时间而变化,时域调查需要复杂的观测序列,使未来的观测取决于过去的观测发生的时间,而云层和天光背景的实时变化则变得更加复杂,本发明提供一种基于深度强化学习的巡天望远镜实时路径规划方法,在构建的恒星观测的环境模型中,控制望远镜的智能体,根据云层、天光背景测控信息、需要规避的目标和观测计划确定望远镜的观测动作,本发明利用全天相机捕捉望远镜所在位置的全天实时图片,降低天空中的云层和天光背景对观测效果的影响,本发明能够实时地根据观测恒星的顺序、
一种基于图论结构和视觉实时检测的增材路径规划方法.pdf
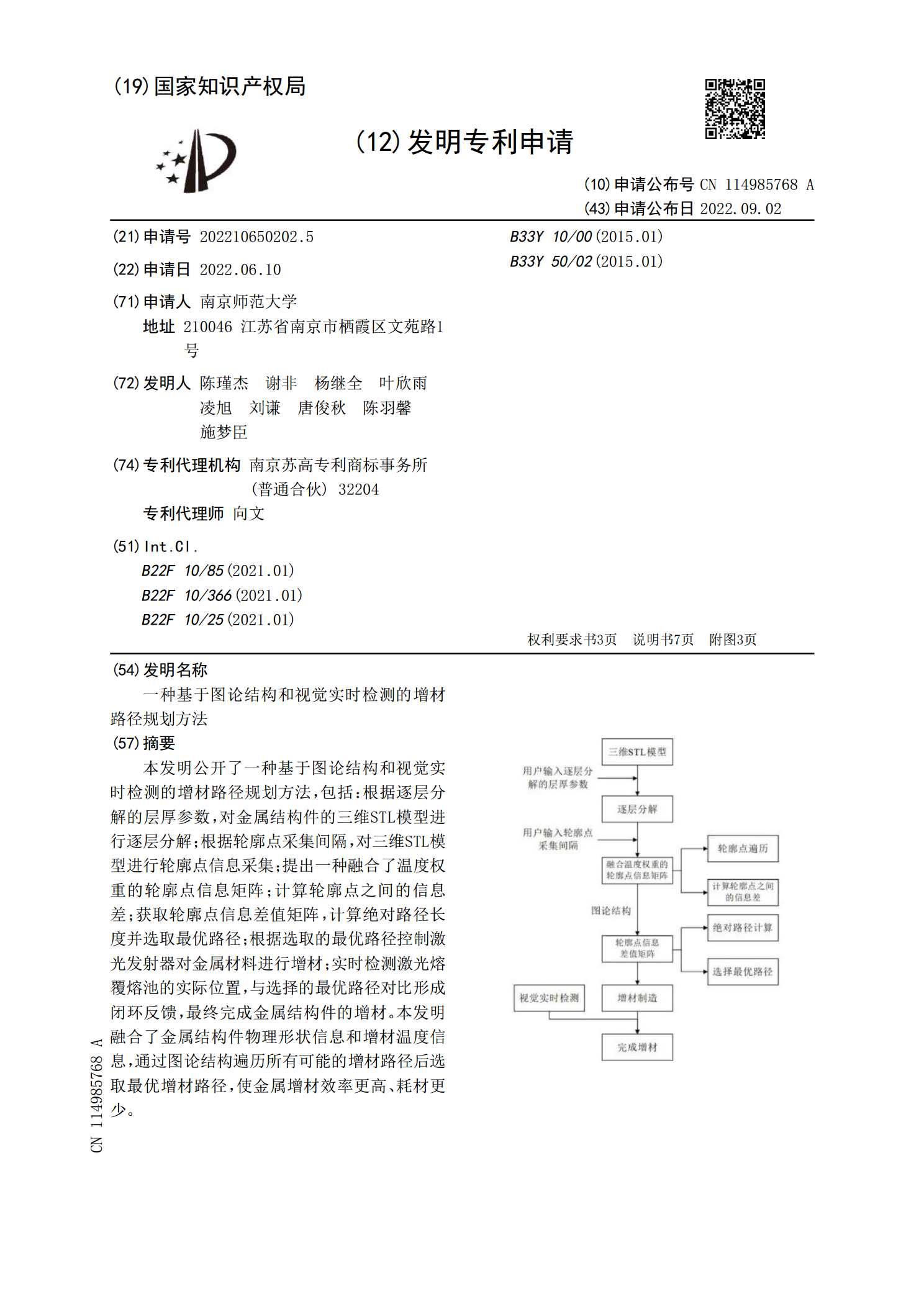
本发明公开了一种基于图论结构和视觉实时检测的增材路径规划方法,包括:根据逐层分解的层厚参数,对金属结构件的三维STL模型进行逐层分解;根据轮廓点采集间隔,对三维STL模型进行轮廓点信息采集;提出一种融合了温度权重的轮廓点信息矩阵;计算轮廓点之间的信息差;获取轮廓点信息差值矩阵,计算绝对路径长度并选取最优路径;根据选取的最优路径控制激光发射器对金属材料进行增材;实时检测激光熔覆熔池的实际位置,与选择的最优路径对比形成闭环反馈,最终完成金属结构件的增材。本发明融合了金属结构件物理形状信息和增材温度信息,通过图
基于深度混合效应模型的金属增材制造过程实时监控方法.pdf
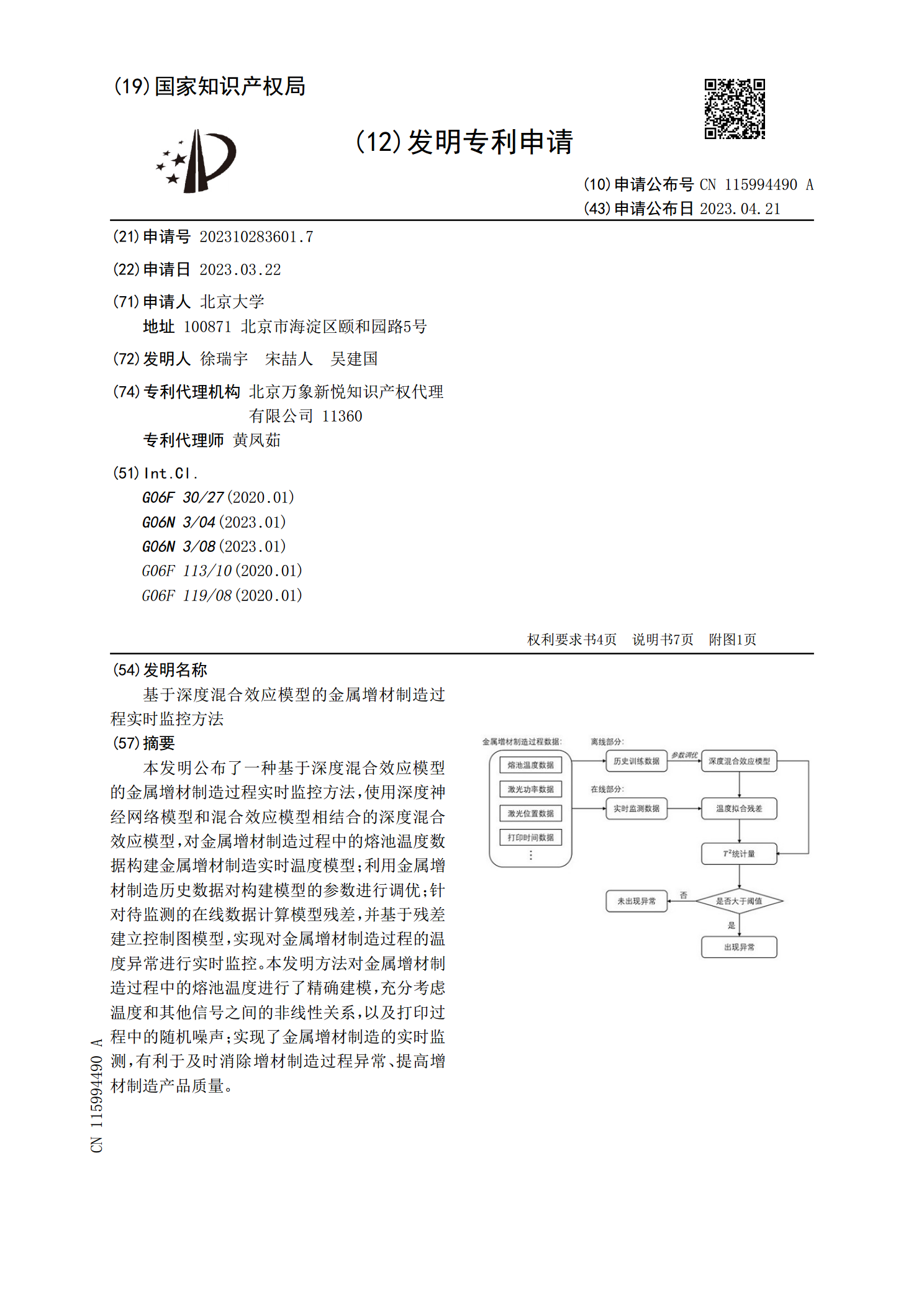
本发明公布了一种基于深度混合效应模型的金属增材制造过程实时监控方法,使用深度神经网络模型和混合效应模型相结合的深度混合效应模型,对金属增材制造过程中的熔池温度数据构建金属增材制造实时温度模型;利用金属增材制造历史数据对构建模型的参数进行调优;针对待监测的在线数据计算模型残差,并基于残差建立控制图模型,实现对金属增材制造过程的温度异常进行实时监控。本发明方法对金属增材制造过程中的熔池温度进行了精确建模,充分考虑温度和其他信号之间的非线性关系,以及打印过程中的随机噪声;实现了金属增材制造的实时监测,有利于及时
一种基于拥塞控制的实时路径规划方法.pdf
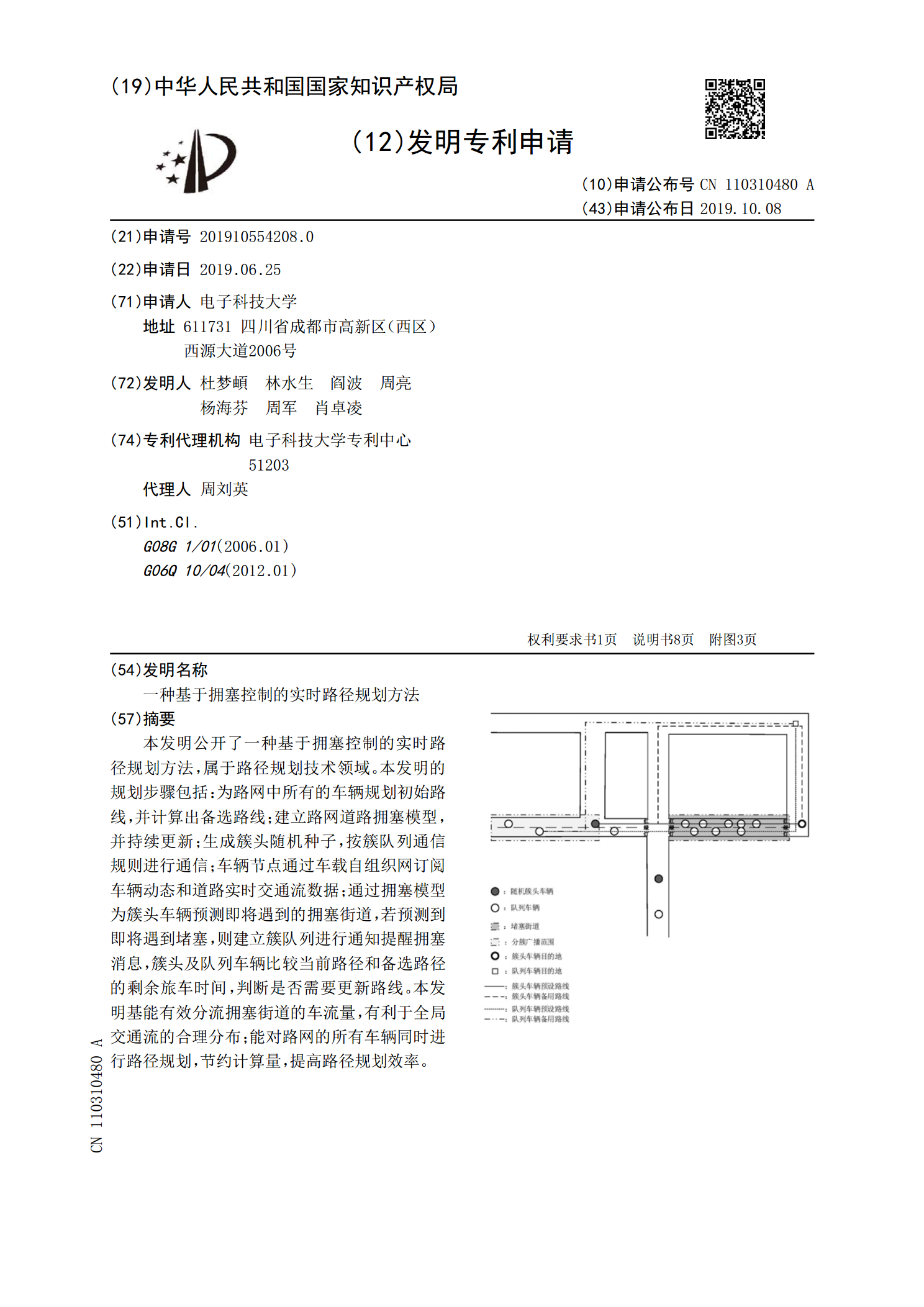
本发明公开了一种基于拥塞控制的实时路径规划方法,属于路径规划技术领域。本发明的规划步骤包括:为路网中所有的车辆规划初始路线,并计算出备选路线;建立路网道路拥塞模型,并持续更新;生成簇头随机种子,按簇队列通信规则进行通信;车辆节点通过车载自组织网订阅车辆动态和道路实时交通流数据;通过拥塞模型为簇头车辆预测即将遇到的拥塞街道,若预测到即将遇到堵塞,则建立簇队列进行通知提醒拥塞消息,簇头及队列车辆比较当前路径和备选路径的剩余旅车时间,判断是否需要更新路线。本发明基能有效分流拥塞街道的车流量,有利于全局交通流的合