
导航系统、导航控制方法及装置、控制器、AGV小车.pdf

小琛****82


1/10
2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
导航系统、导航控制方法及装置、控制器、AGV小车.pdf
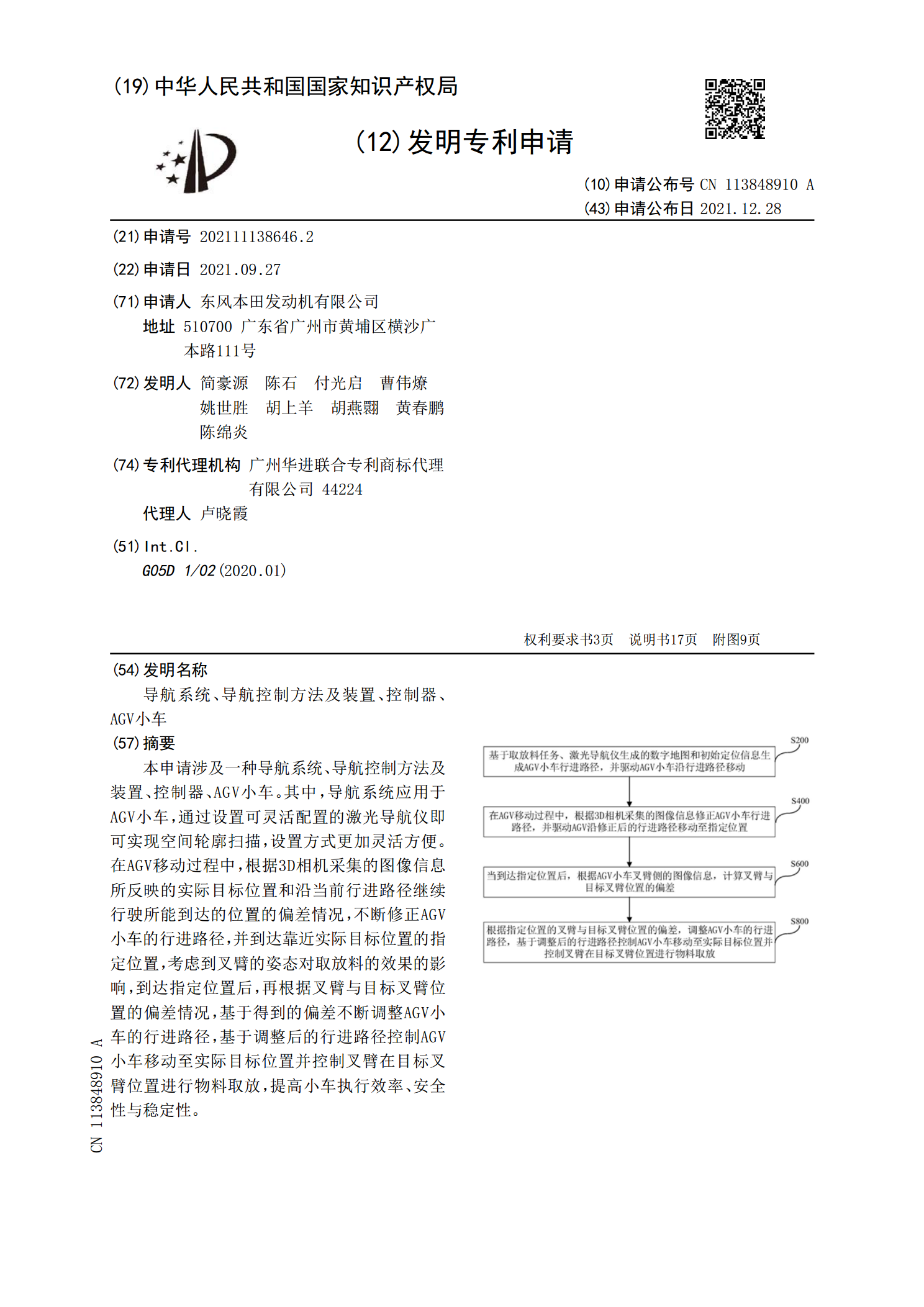
本申请涉及一种导航系统、导航控制方法及装置、控制器、AGV小车。其中,导航系统应用于AGV小车,通过设置可灵活配置的激光导航仪即可实现空间轮廓扫描,设置方式更加灵活方便。在AGV移动过程中,根据3D相机采集的图像信息所反映的实际目标位置和沿当前行进路径继续行驶所能到达的位置的偏差情况,不断修正AGV小车的行进路径,并到达靠近实际目标位置的指定位置,考虑到叉臂的姿态对取放料的效果的影响,到达指定位置后,再根据叉臂与目标叉臂位置的偏差情况,基于得到的偏差不断调整AGV小车的行进路径,基于调整后的行进路径控制A

AGV运动导航核心控制器的物理参数校核方法以及AGV小车.pdf
本发明公开了一种AGV运动导航核心控制器的物理参数校核方法以及AGV小车,包括车体外壳,车体外壳的两个侧面上分别开有散热孔,车体外壳上设有散热孔的侧面上,一侧面上设有红外线感应器二,另一侧面上设有红外线感应器三,车体外壳上设有红外线感应器二的一侧面上还设有红外线接收器二,车体外壳上设有红外线感应器三的一侧面上还设有红外线接收器三,车体外壳的底端分别对称的设有四个矩形槽,矩形槽内分别设有车轮,前端的两个车轮之间连接有转轴一,十字固定块插接在圆台上的十字卡槽内,后端左侧的圆台上设有电机二,电机二的输出轴设有十

AGV小车自适应导航方法及系统.pdf
本发明涉及一种AGV小车自适应导航方法及系统,包括建立原始数据库,对AGV小车运行过程中的行走距离及AGV小车的左、右轮差速比进行采样;及左、右轮差速比信息传输至原始数据库,原始数据库将接受的信息与正常行驶的AGV小车的左、右轮差速比进行比对,发出故障报警信号,且将差值信号发送至处理模块,处理模块接收差值信号后进行处理,并发出信号至控制单元,控制单元发出控制信号用于调节AGV小车的左、右轮速度,从而实现AGV小车自适应调整,或者检修操作。
一种AGV小车导航方法.pdf
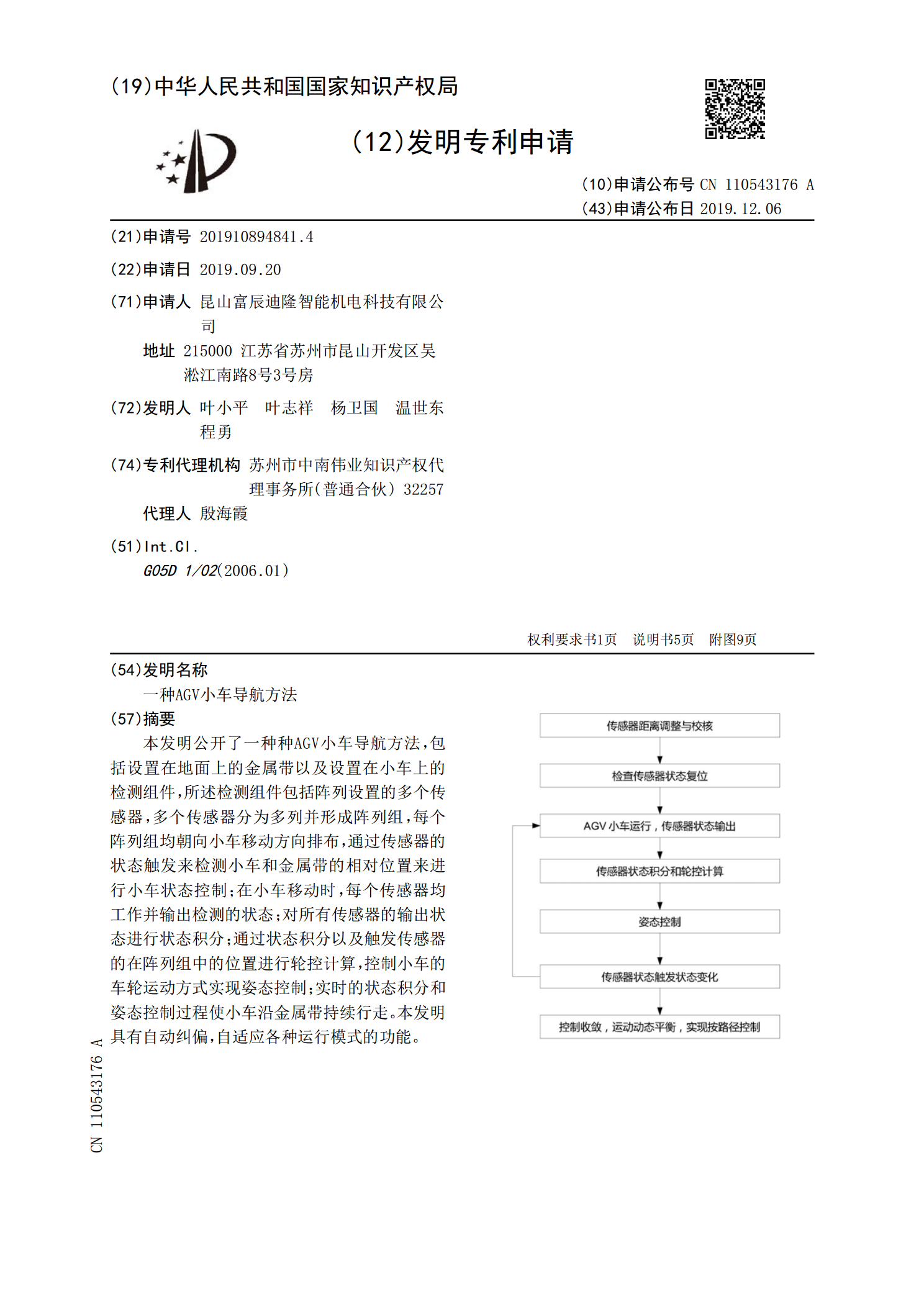
本发明公开了一种种AGV小车导航方法,包括设置在地面上的金属带以及设置在小车上的检测组件,所述检测组件包括阵列设置的多个传感器,多个传感器分为多列并形成阵列组,每个阵列组均朝向小车移动方向排布,通过传感器的状态触发来检测小车和金属带的相对位置来进行小车状态控制;在小车移动时,每个传感器均工作并输出检测的状态;对所有传感器的输出状态进行状态积分;通过状态积分以及触发传感器的在阵列组中的位置进行轮控计算,控制小车的车轮运动方式实现姿态控制;实时的状态积分和姿态控制过程使小车沿金属带持续行走。本发明具有自动纠偏

一种潜入式AGV导航小车及其控制方法.pdf
一种潜入式AGV导航小车,包括车体焊接结构及外壳、报警防撞保护装置、升降定位锁定装置、驱动单元、控制单元、导航定位装置、万向从动轮、定向轮。车体焊接结构固定AGV各单元与装置,报警防撞保护装置包括障碍识别感应器、防撞胶条、声光感应器、显示屏、急停开关、前盖,升降定位锁定装置包括升降杆、升降电机、升降杆套、弹簧限位板、销轴挡板及固定钣金;地轮驱动装置设置左右二轮对称于车体中间,采用差速驱动方式;控制单元使用基于ARM双处理器的控制系统,包括控制板、电机驱动、驱动器固定板、ARM处理器、蓄电池、电池承载座。以