
轨迹预测方法及装置.pdf

秀美****甜v


1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共43页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轨迹预测方法及装置.pdf
本申请提供一种轨迹预测方法及装置,能够准确预测周围车辆经过路口的未来行驶轨迹,从而提高本车路径规划的安全性。该方法包括:根据目标车辆的历史行驶轨迹确定目标车辆的运动语义、道路几何语义,并结合目标车辆的运动信息确定目标虚拟车道以及目标出口车道,从而得到目标车辆在第一时间段的行驶轨迹。其中,运动语义表示目标车辆的行为,如左转、直行、右转、或调头,道路几何语义用于表示以入口道路为基准,目标车辆所在路口包括的出口道路和/或虚拟车道的行驶规则,入口道路为目标车辆所在路口的入口,运动信息包括目标车辆的运动方向和目标车

轨迹预测方法和装置.pdf
本发明提供了一种轨迹预测方法及装置,所述方法包括:针对待预测轨迹的用户设备UE,获取打车平台在预设时间段内记录的UE发出打车请求的出发地信息和目的地信息;根据预先建立的分类模型,对所有的出发地信息和/或目的地信息进行分类处理,确定所述UE在预设时间段内的分类类型,该分类类型为属于预设的POI分类类型中的一种或多种;根据所述UE在预设时间段内的分类类型,预测所述UE的轨迹。本发明能够根据从用户打车系统中获取的打车数据获取用户的兴趣点,进而预测用户的出行轨迹。
行人轨迹预测方法、装置及存储介质.pdf
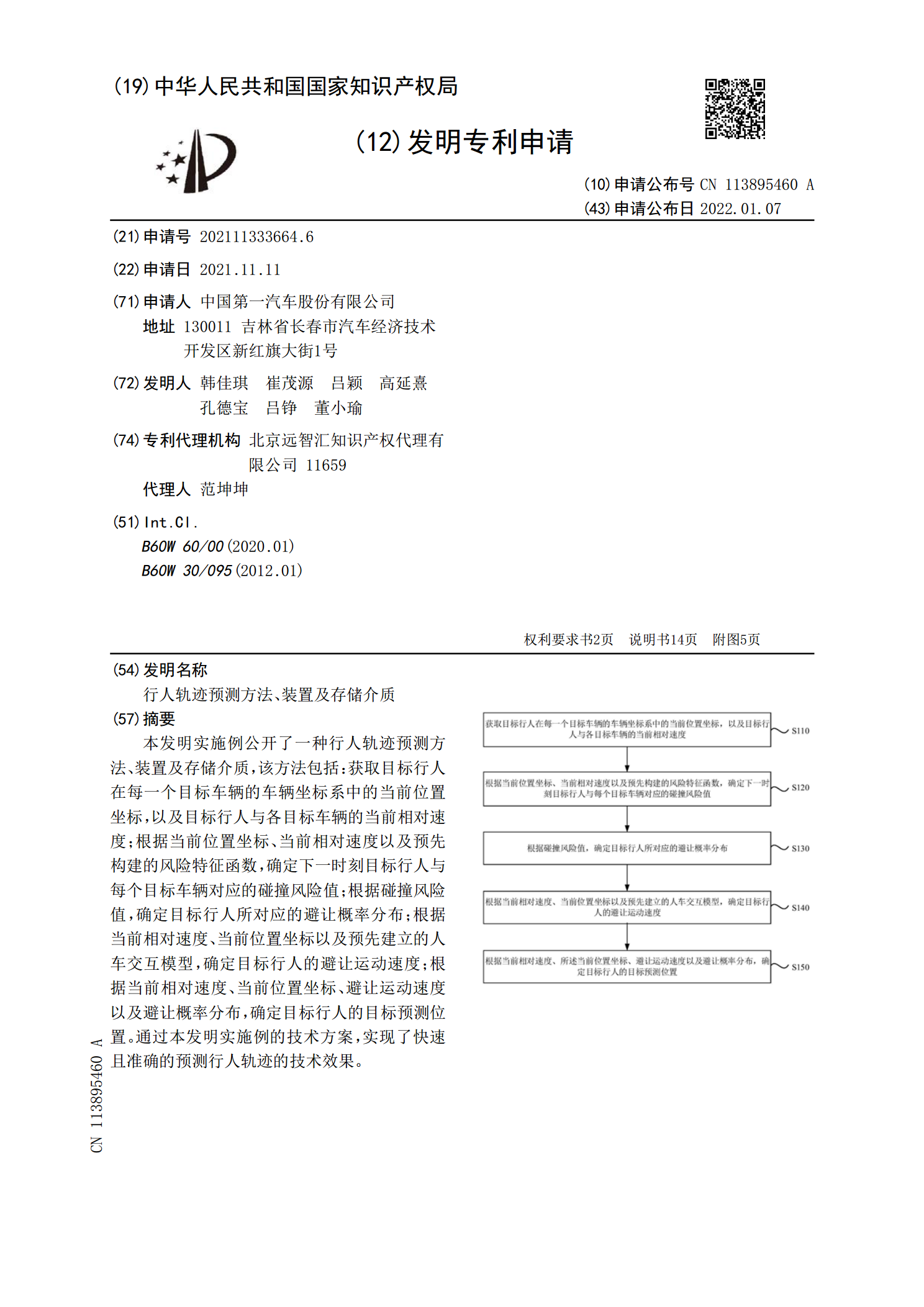
本发明实施例公开了一种行人轨迹预测方法、装置及存储介质,该方法包括:获取目标行人在每一个目标车辆的车辆坐标系中的当前位置坐标,以及目标行人与各目标车辆的当前相对速度;根据当前位置坐标、当前相对速度以及预先构建的风险特征函数,确定下一时刻目标行人与每个目标车辆对应的碰撞风险值;根据碰撞风险值,确定目标行人所对应的避让概率分布;根据当前相对速度、当前位置坐标以及预先建立的人车交互模型,确定目标行人的避让运动速度;根据当前相对速度、当前位置坐标、避让运动速度以及避让概率分布,确定目标行人的目标预测位置。通过本发
车辆行人地图轨迹预测方法及装置.pdf
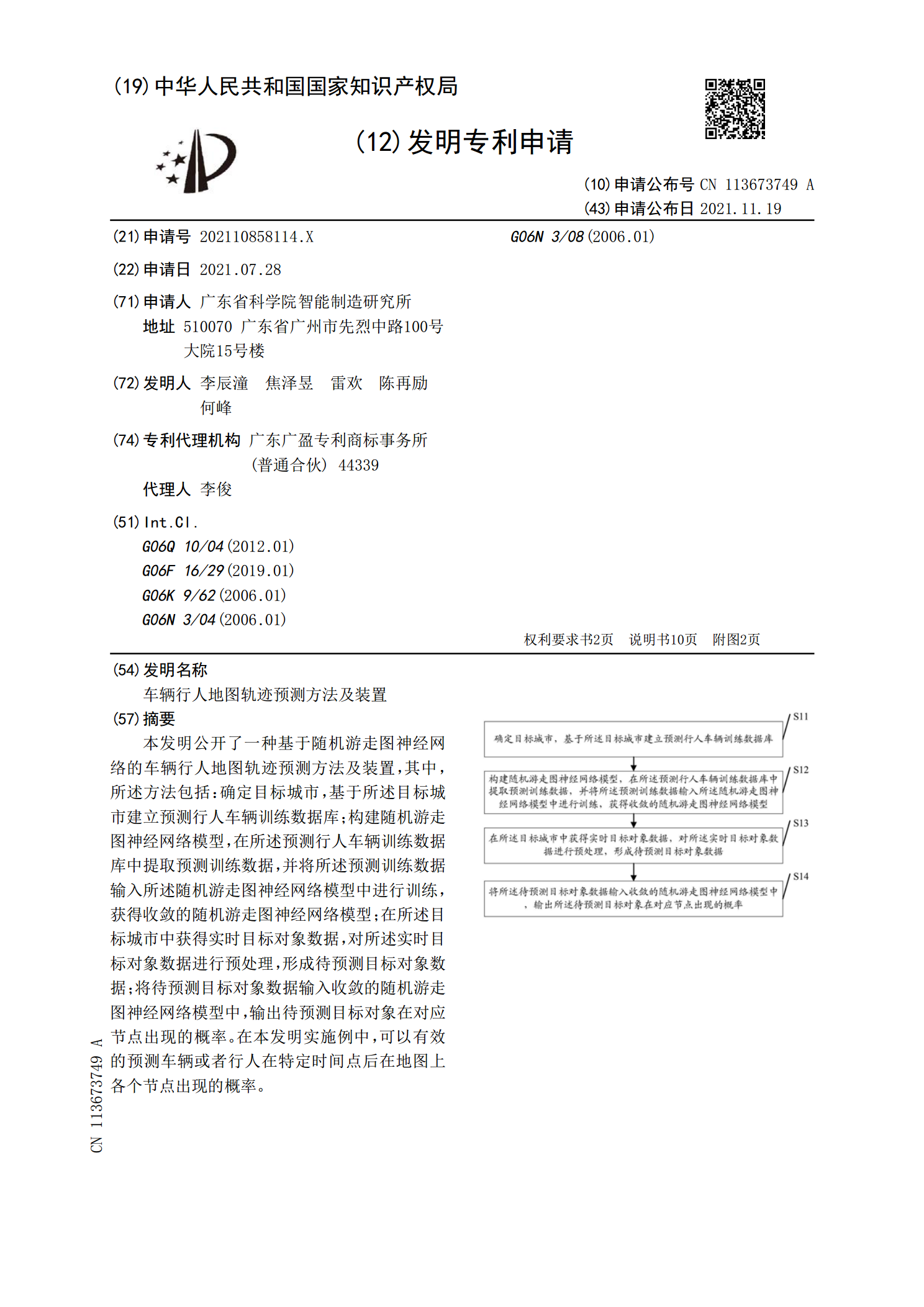
本发明公开了一种基于随机游走图神经网络的车辆行人地图轨迹预测方法及装置,其中,所述方法包括:确定目标城市,基于所述目标城市建立预测行人车辆训练数据库;构建随机游走图神经网络模型,在所述预测行人车辆训练数据库中提取预测训练数据,并将所述预测训练数据输入所述随机游走图神经网络模型中进行训练,获得收敛的随机游走图神经网络模型;在所述目标城市中获得实时目标对象数据,对所述实时目标对象数据进行预处理,形成待预测目标对象数据;将待预测目标对象数据输入收敛的随机游走图神经网络模型中,输出待预测目标对象在对应节点出现的概
一种轨迹预测方法、装置及地图.pdf
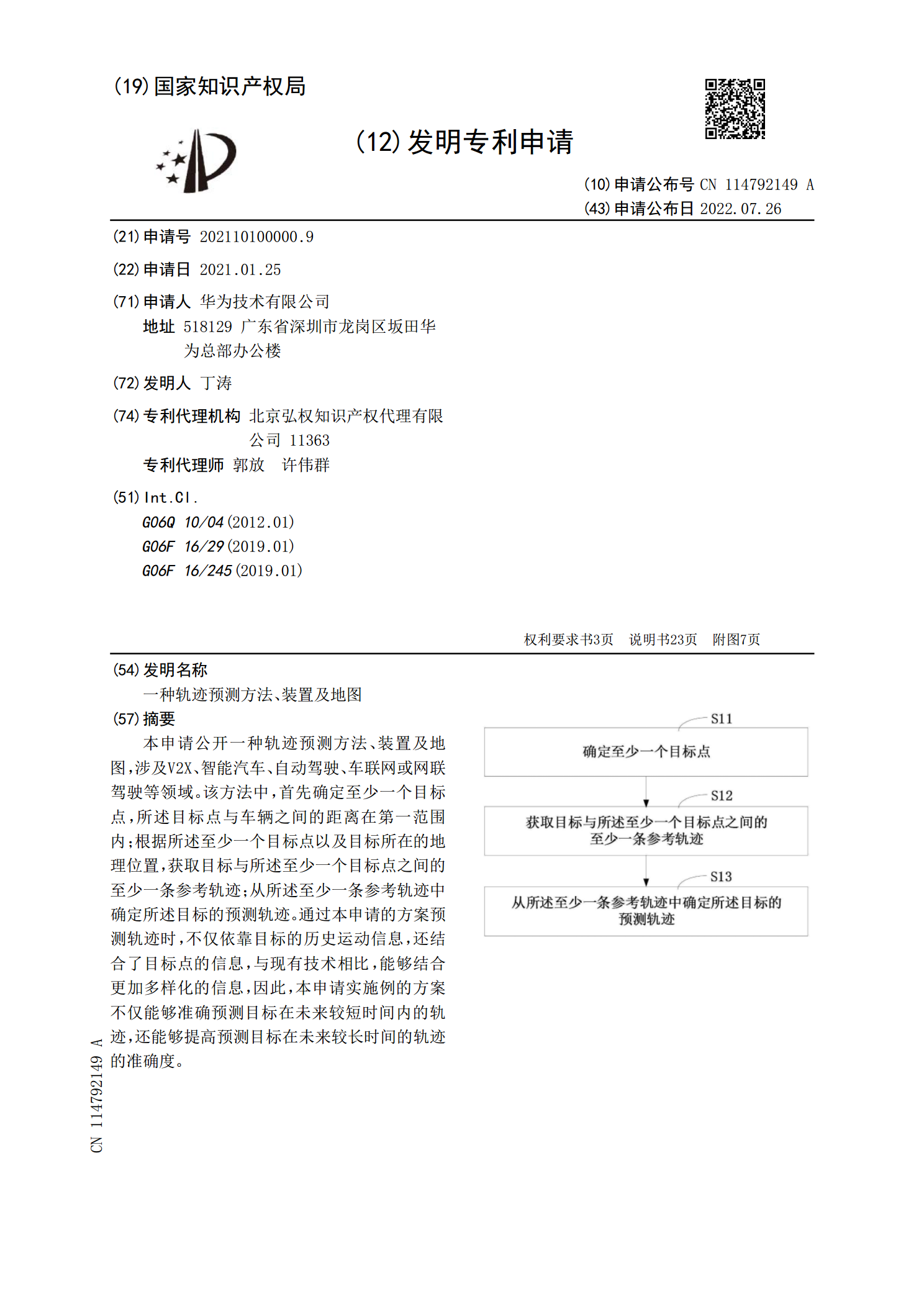
本申请公开一种轨迹预测方法、装置及地图,涉及V2X、智能汽车、自动驾驶、车联网或网联驾驶等领域。该方法中,首先确定至少一个目标点,所述目标点与车辆之间的距离在第一范围内;根据所述至少一个目标点以及目标所在的地理位置,获取目标与所述至少一个目标点之间的至少一条参考轨迹;从所述至少一条参考轨迹中确定所述目标的预测轨迹。通过本申请的方案预测轨迹时,不仅依靠目标的历史运动信息,还结合了目标点的信息,与现有技术相比,能够结合更加多样化的信息,因此,本申请实施例的方案不仅能够准确预测目标在未来较短时间内的轨迹,还能够