
车辆行人地图轨迹预测方法及装置.pdf

一条****涛k

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆行人地图轨迹预测方法及装置.pdf
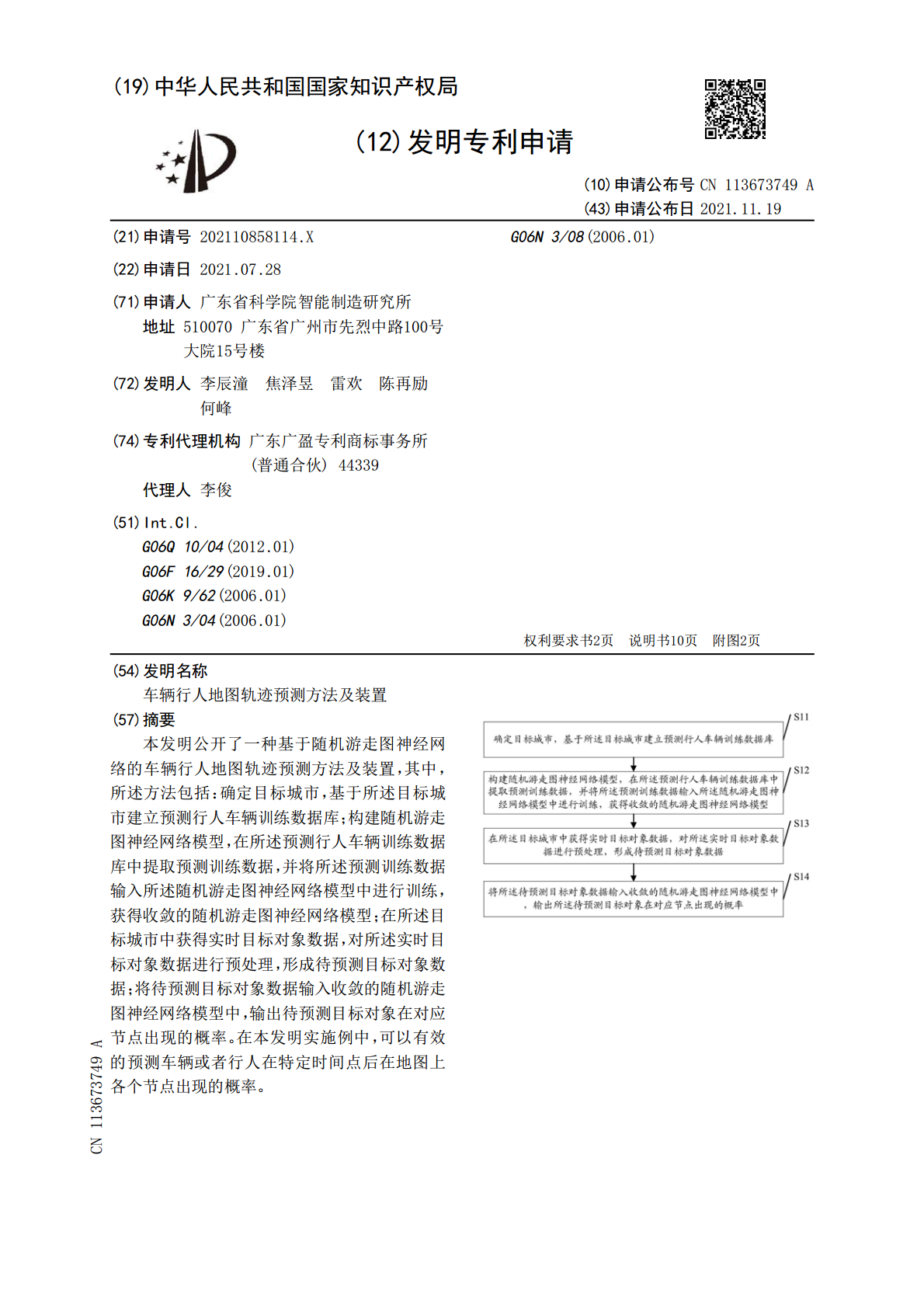
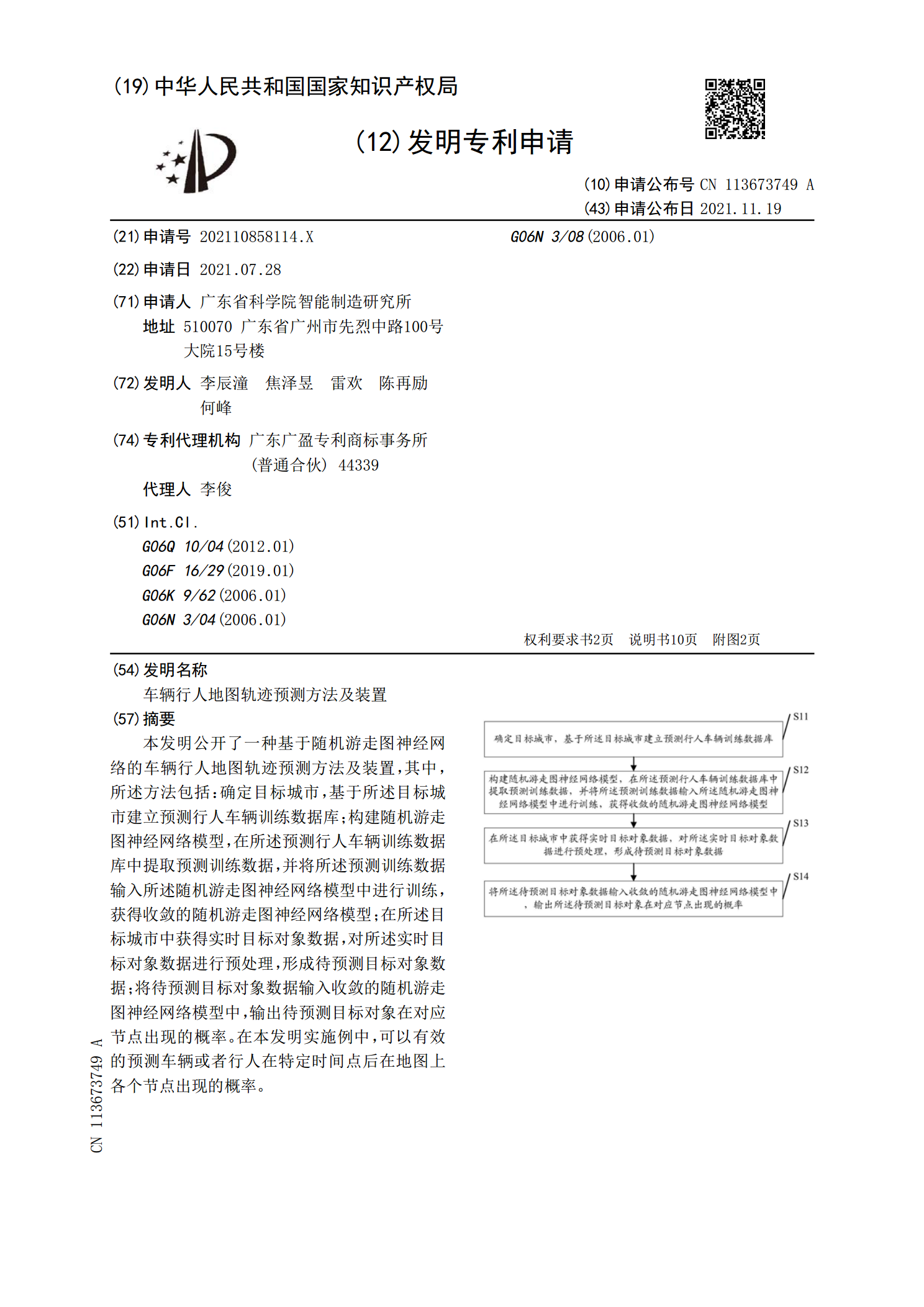
本发明公开了一种基于随机游走图神经网络的车辆行人地图轨迹预测方法及装置,其中,所述方法包括:确定目标城市,基于所述目标城市建立预测行人车辆训练数据库;构建随机游走图神经网络模型,在所述预测行人车辆训练数据库中提取预测训练数据,并将所述预测训练数据输入所述随机游走图神经网络模型中进行训练,获得收敛的随机游走图神经网络模型;在所述目标城市中获得实时目标对象数据,对所述实时目标对象数据进行预处理,形成待预测目标对象数据;将待预测目标对象数据输入收敛的随机游走图神经网络模型中,输出待预测目标对象在对应节点出现的概
行人轨迹预测方法、装置及存储介质.pdf
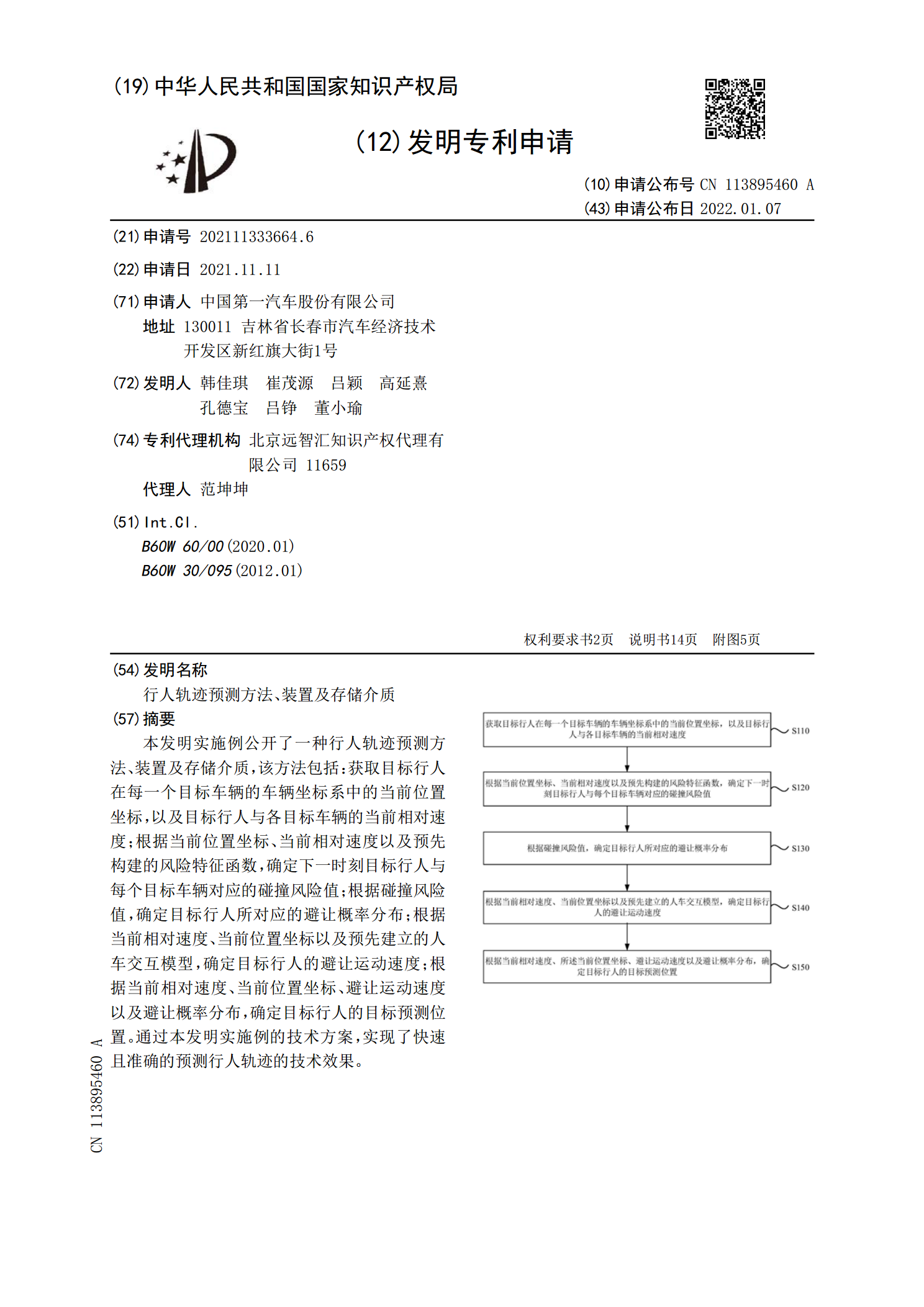
本发明实施例公开了一种行人轨迹预测方法、装置及存储介质,该方法包括:获取目标行人在每一个目标车辆的车辆坐标系中的当前位置坐标,以及目标行人与各目标车辆的当前相对速度;根据当前位置坐标、当前相对速度以及预先构建的风险特征函数,确定下一时刻目标行人与每个目标车辆对应的碰撞风险值;根据碰撞风险值,确定目标行人所对应的避让概率分布;根据当前相对速度、当前位置坐标以及预先建立的人车交互模型,确定目标行人的避让运动速度;根据当前相对速度、当前位置坐标、避让运动速度以及避让概率分布,确定目标行人的目标预测位置。通过本发
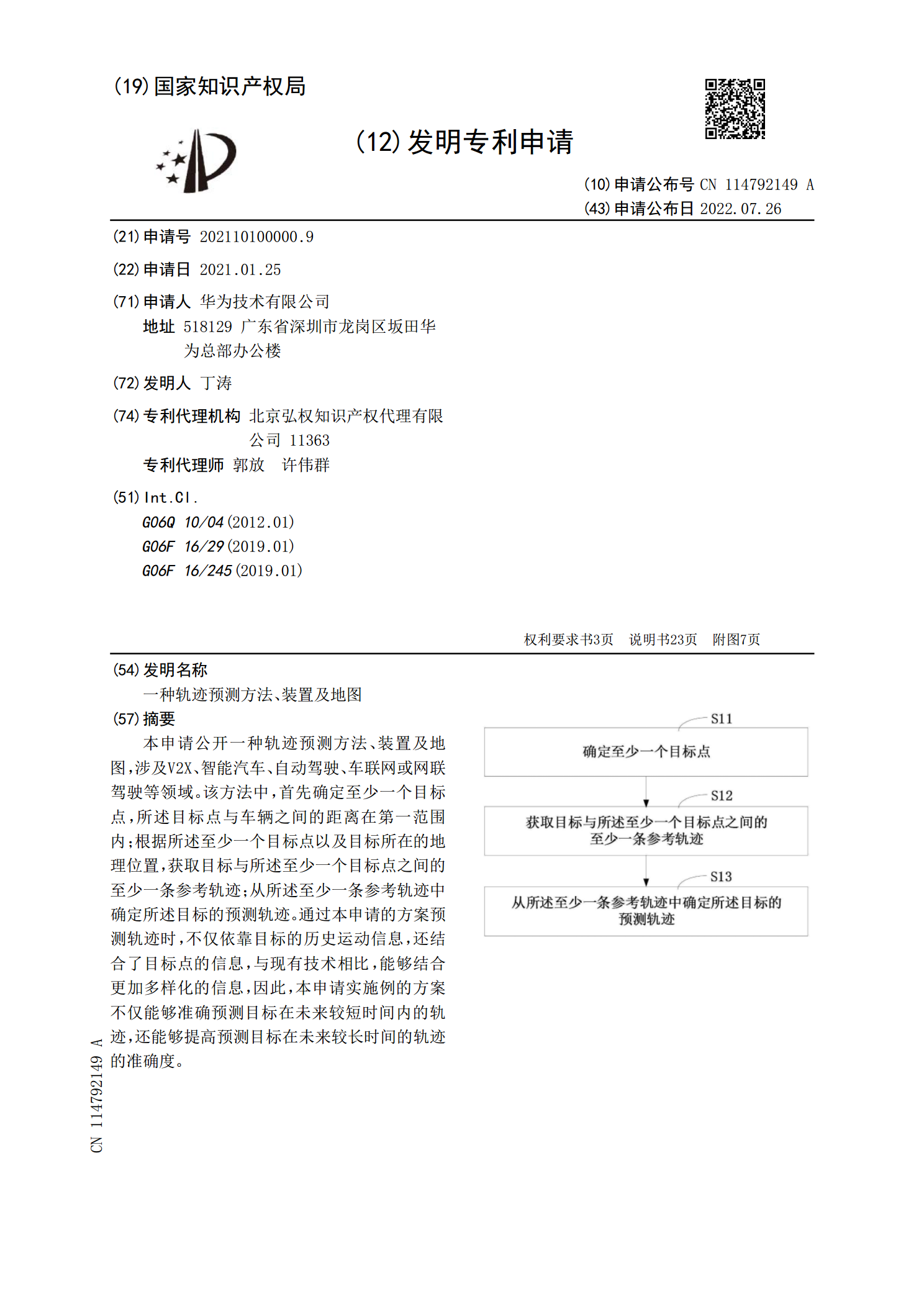
一种轨迹预测方法、装置及地图.pdf
本申请公开一种轨迹预测方法、装置及地图,涉及V2X、智能汽车、自动驾驶、车联网或网联驾驶等领域。该方法中,首先确定至少一个目标点,所述目标点与车辆之间的距离在第一范围内;根据所述至少一个目标点以及目标所在的地理位置,获取目标与所述至少一个目标点之间的至少一条参考轨迹;从所述至少一条参考轨迹中确定所述目标的预测轨迹。通过本申请的方案预测轨迹时,不仅依靠目标的历史运动信息,还结合了目标点的信息,与现有技术相比,能够结合更加多样化的信息,因此,本申请实施例的方案不仅能够准确预测目标在未来较短时间内的轨迹,还能够
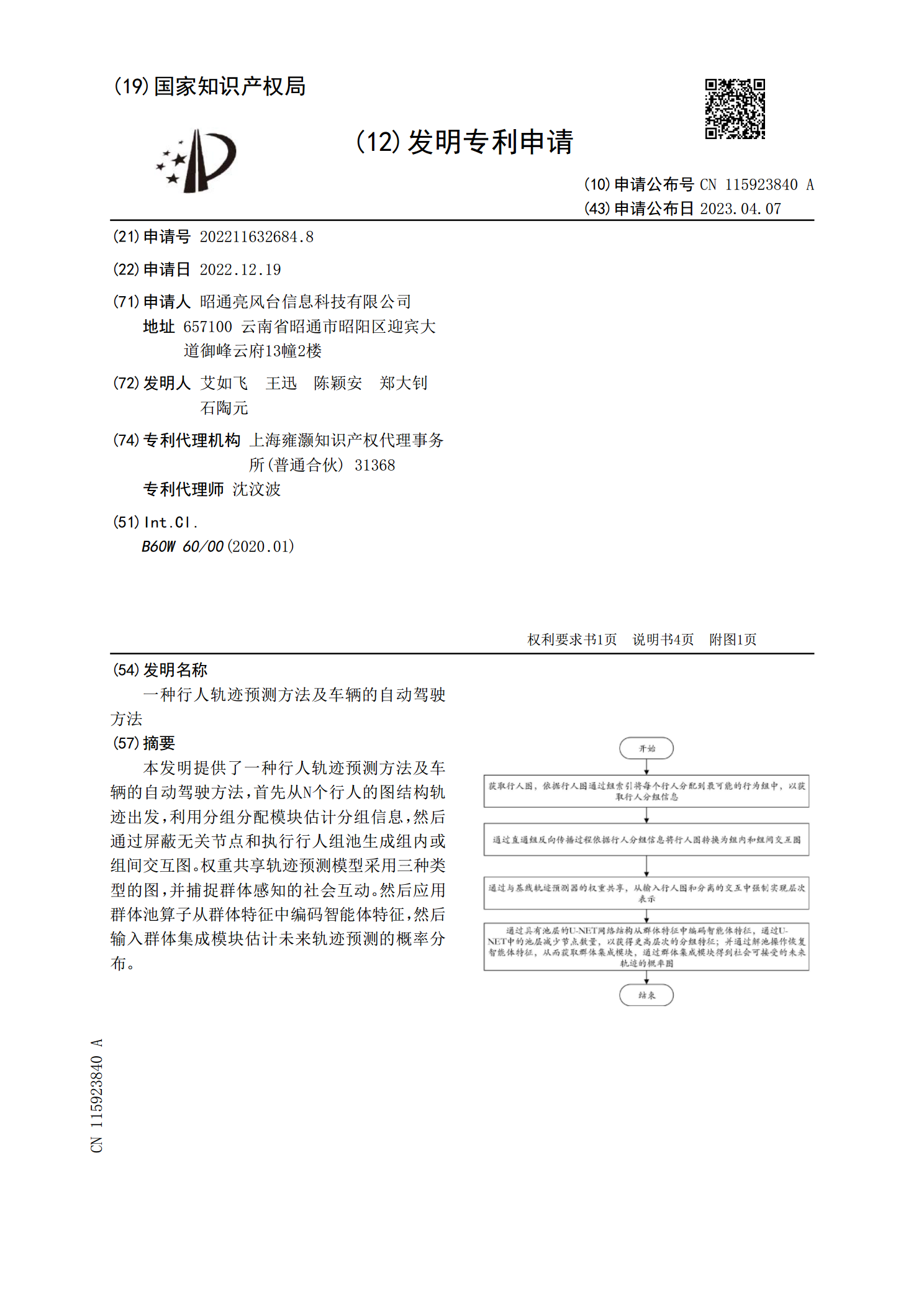
一种行人轨迹预测方法及车辆的自动驾驶方法.pdf
本发明提供了一种行人轨迹预测方法及车辆的自动驾驶方法,首先从N个行人的图结构轨迹出发,利用分组分配模块估计分组信息,然后通过屏蔽无关节点和执行行人组池生成组内或组间交互图。权重共享轨迹预测模型采用三种类型的图,并捕捉群体感知的社会互动。然后应用群体池算子从群体特征中编码智能体特征,然后输入群体集成模块估计未来轨迹预测的概率分布。
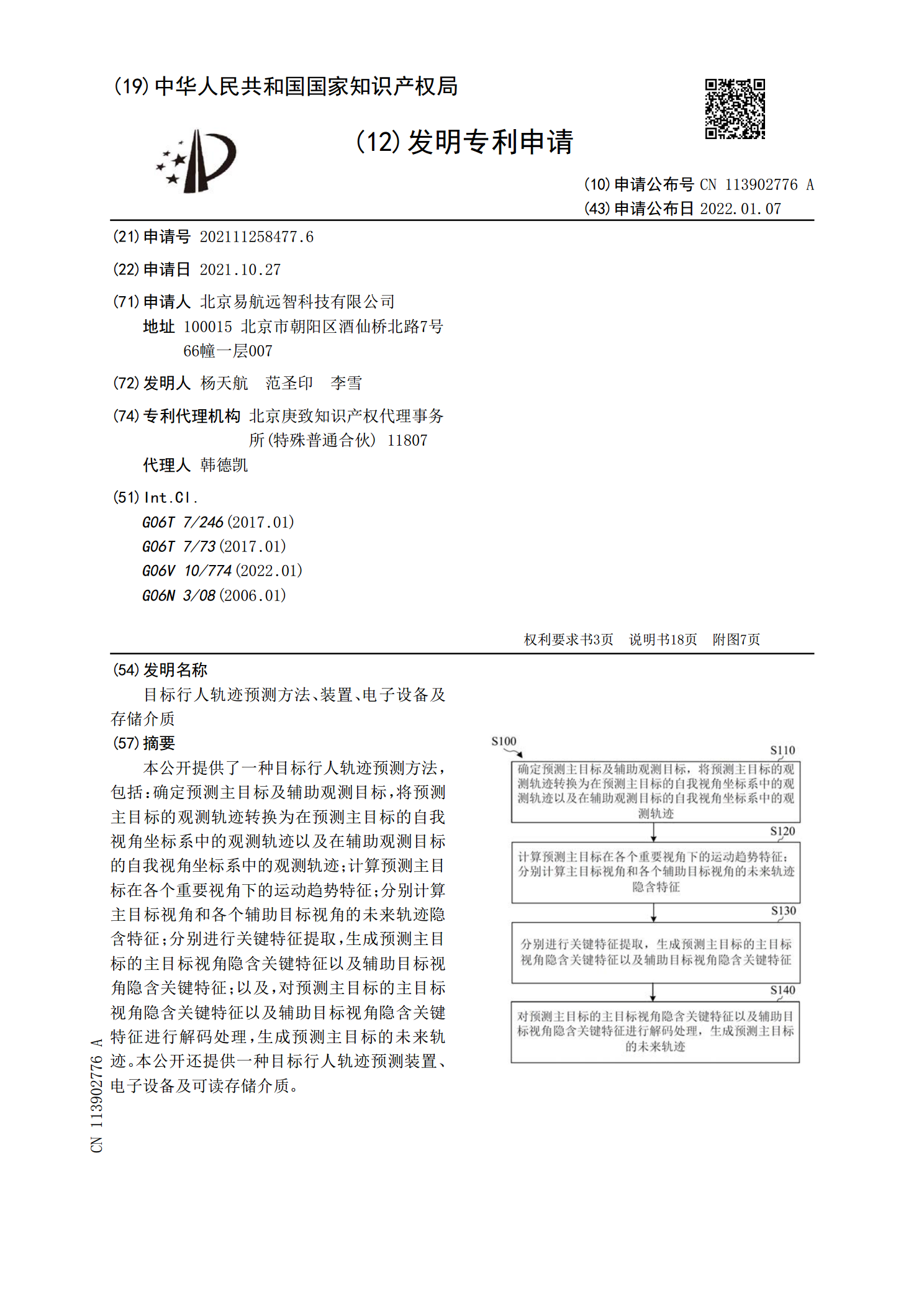
目标行人轨迹预测方法、装置、电子设备及存储介质.pdf
本公开提供了一种目标行人轨迹预测方法,包括:确定预测主目标及辅助观测目标,将预测主目标的观测轨迹转换为在预测主目标的自我视角坐标系中的观测轨迹以及在辅助观测目标的自我视角坐标系中的观测轨迹;计算预测主目标在各个重要视角下的运动趋势特征;分别计算主目标视角和各个辅助目标视角的未来轨迹隐含特征;分别进行关键特征提取,生成预测主目标的主目标视角隐含关键特征以及辅助目标视角隐含关键特征;以及,对预测主目标的主目标视角隐含关键特征以及辅助目标视角隐含关键特征进行解码处理,生成预测主目标的未来轨迹。本公开还提供一种目