
行人轨迹预测方法、装置及存储介质.pdf

书生****aa

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
行人轨迹预测方法、装置及存储介质.pdf
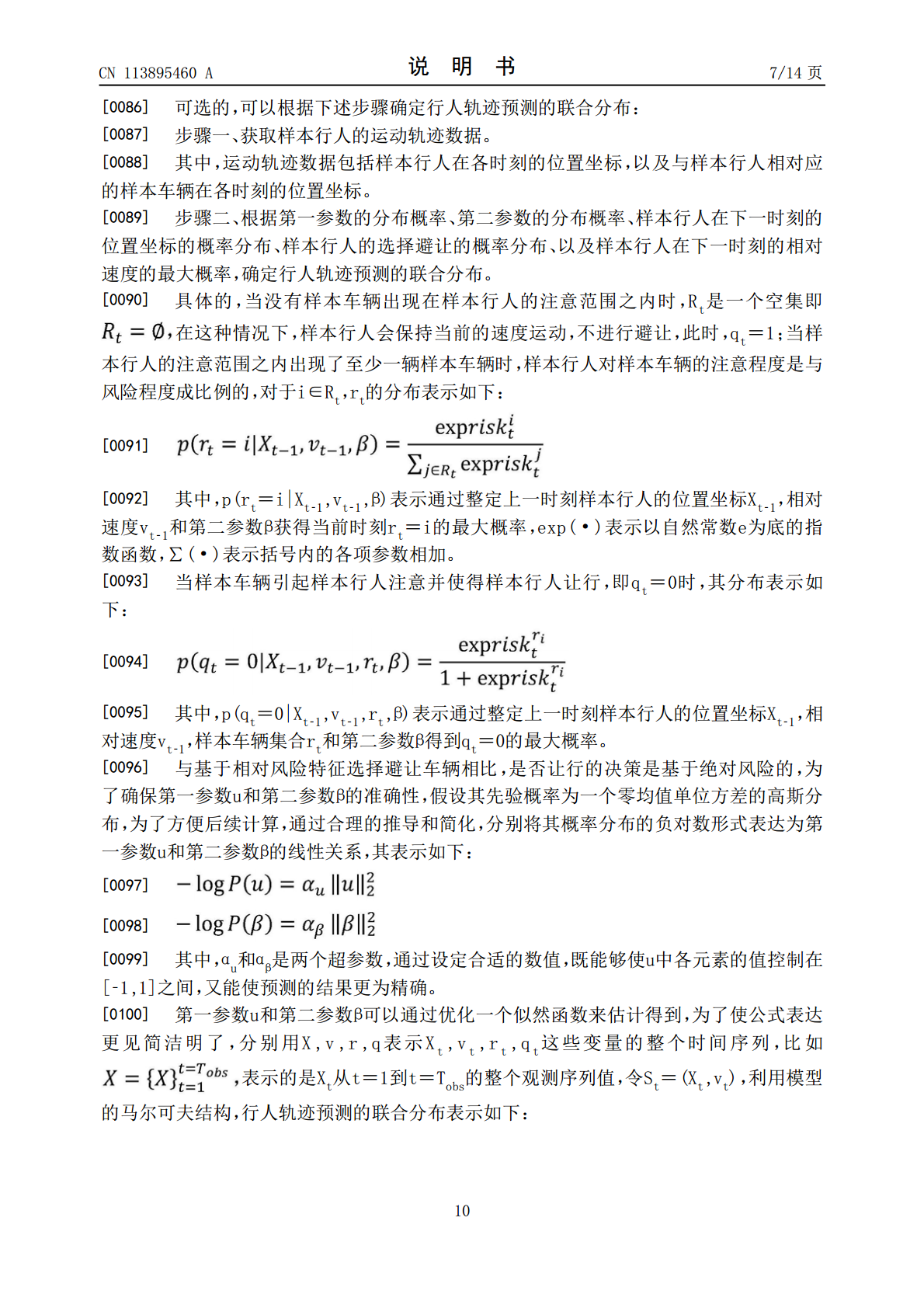
本发明实施例公开了一种行人轨迹预测方法、装置及存储介质,该方法包括:获取目标行人在每一个目标车辆的车辆坐标系中的当前位置坐标,以及目标行人与各目标车辆的当前相对速度;根据当前位置坐标、当前相对速度以及预先构建的风险特征函数,确定下一时刻目标行人与每个目标车辆对应的碰撞风险值;根据碰撞风险值,确定目标行人所对应的避让概率分布;根据当前相对速度、当前位置坐标以及预先建立的人车交互模型,确定目标行人的避让运动速度;根据当前相对速度、当前位置坐标、避让运动速度以及避让概率分布,确定目标行人的目标预测位置。通过本发
目标行人轨迹预测方法、装置、电子设备及存储介质.pdf
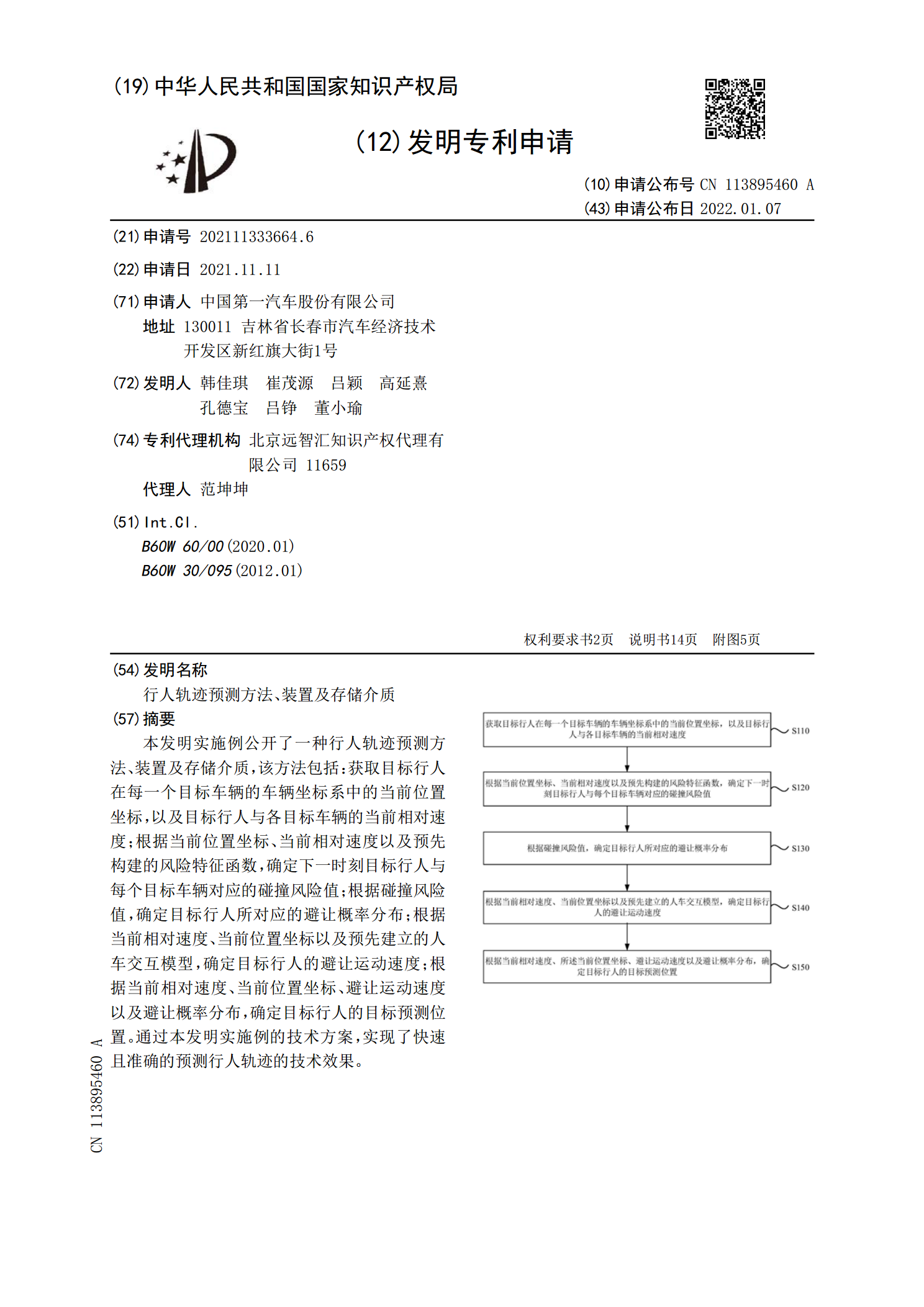
本公开提供了一种目标行人轨迹预测方法,包括:确定预测主目标及辅助观测目标,将预测主目标的观测轨迹转换为在预测主目标的自我视角坐标系中的观测轨迹以及在辅助观测目标的自我视角坐标系中的观测轨迹;计算预测主目标在各个重要视角下的运动趋势特征;分别计算主目标视角和各个辅助目标视角的未来轨迹隐含特征;分别进行关键特征提取,生成预测主目标的主目标视角隐含关键特征以及辅助目标视角隐含关键特征;以及,对预测主目标的主目标视角隐含关键特征以及辅助目标视角隐含关键特征进行解码处理,生成预测主目标的未来轨迹。本公开还提供一种目
一种全景视频两帧行人轨迹预测方法、装置及存储介质.pdf
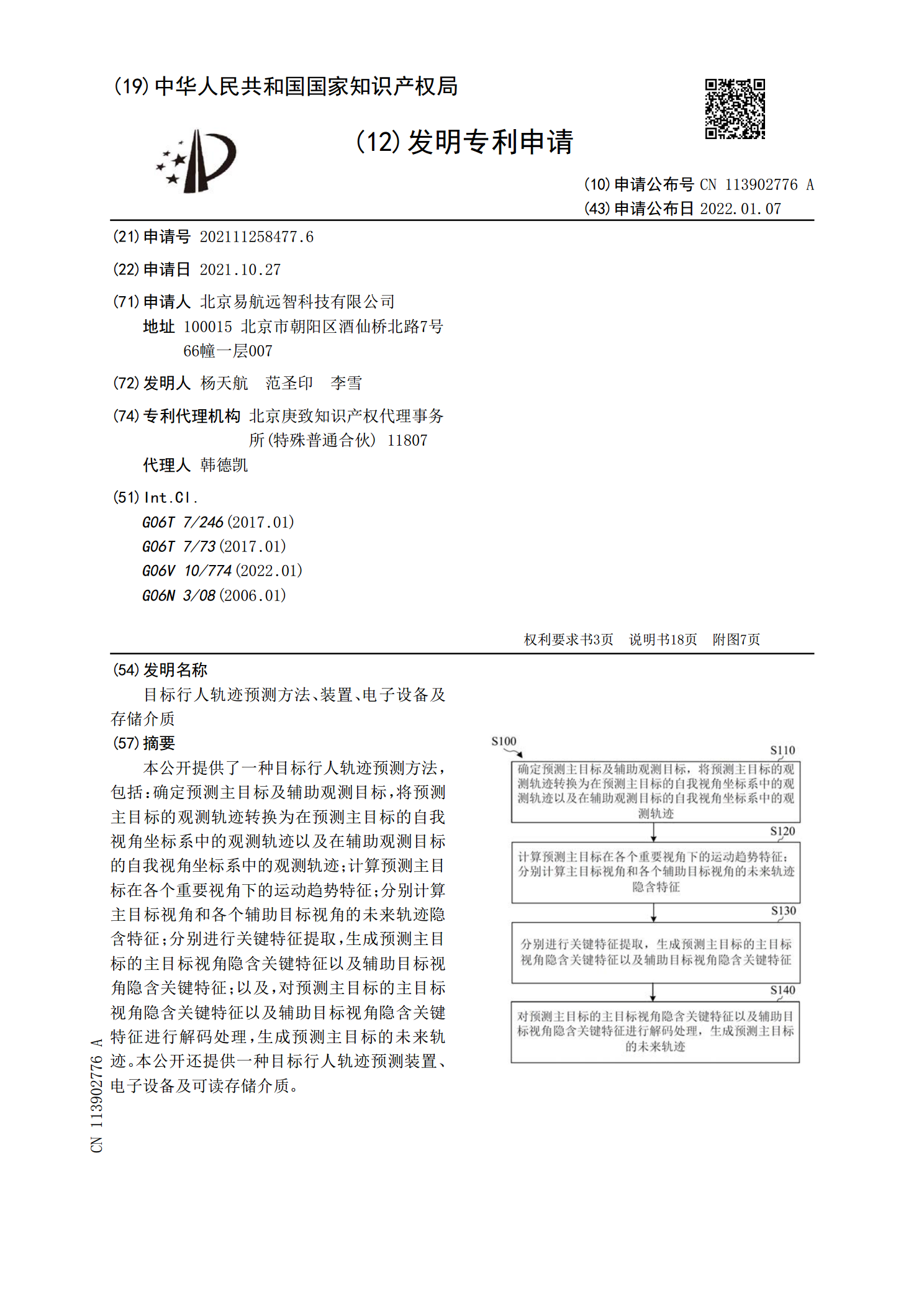
本发明涉及一种全景视频两帧行人轨迹预测方法、装置及存储介质,其中方法包括:获取全景视频,提取全景视频中行人的位置信息、速度信息、动作信息和光流信息,将行人划分为自由移动行人和社交移动行人;计算自由行人数据集与全体行人数据集;使用训练完成网络进行行人轨迹预测,其中自由行人预测网络是基于自由行人数据集来训练,未来社交池化网络和社交行人预测网络是基于全体行人数据集来训练。本发明提供一种全景视频行人轨迹预测方法,构建以行人历史位置信息、历史动作信息和历史光流信息为输入的行人轨迹预测网络模型,以达到更高精度的行人轨
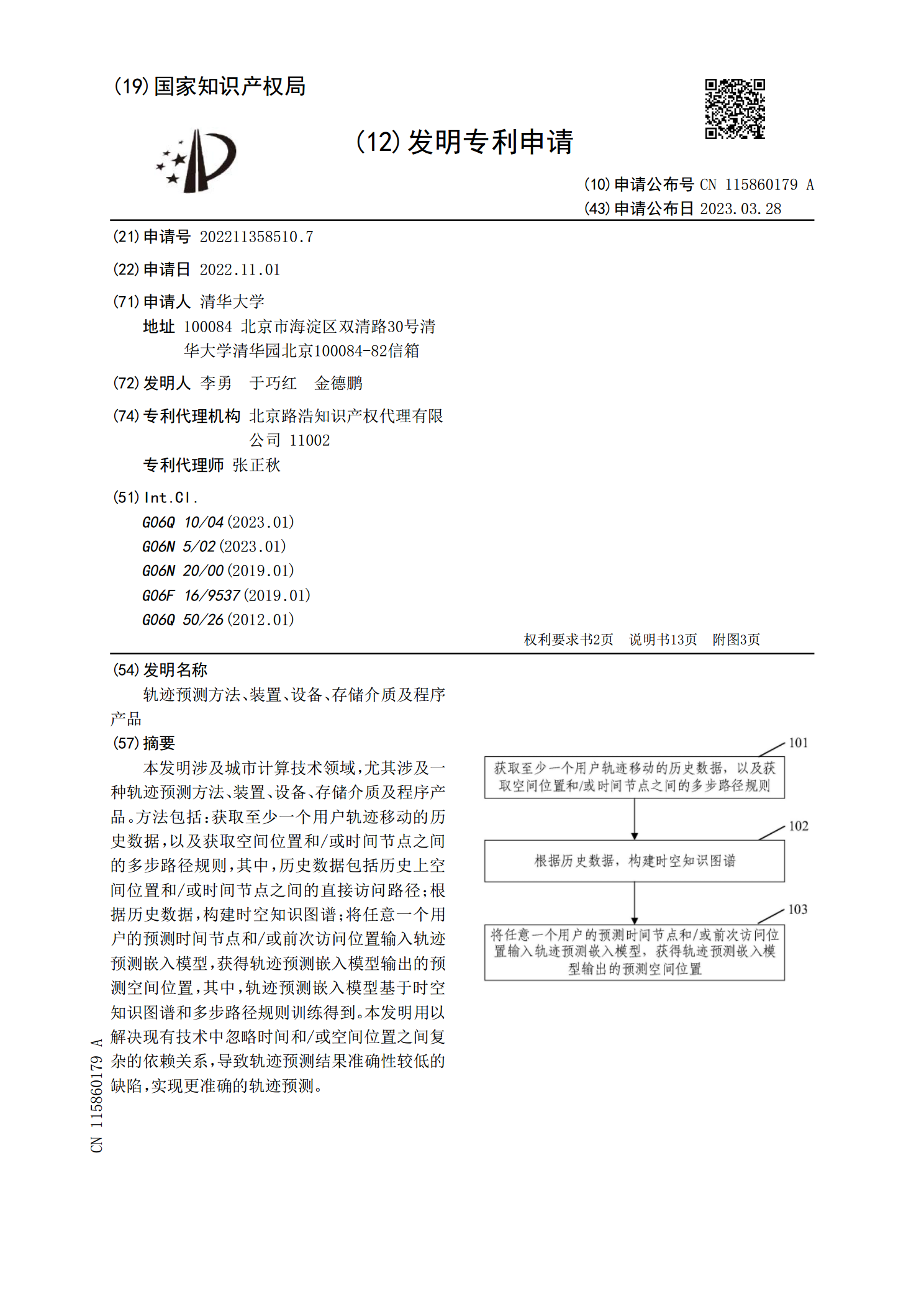
轨迹预测方法、装置、设备、存储介质及程序产品.pdf
本发明涉及城市计算技术领域,尤其涉及一种轨迹预测方法、装置、设备、存储介质及程序产品。方法包括:获取至少一个用户轨迹移动的历史数据,以及获取空间位置和/或时间节点之间的多步路径规则,其中,历史数据包括历史上空间位置和/或时间节点之间的直接访问路径;根据历史数据,构建时空知识图谱;将任意一个用户的预测时间节点和/或前次访问位置输入轨迹预测嵌入模型,获得轨迹预测嵌入模型输出的预测空间位置,其中,轨迹预测嵌入模型基于时空知识图谱和多步路径规则训练得到。本发明用以解决现有技术中忽略时间和/或空间位置之间复杂的依赖
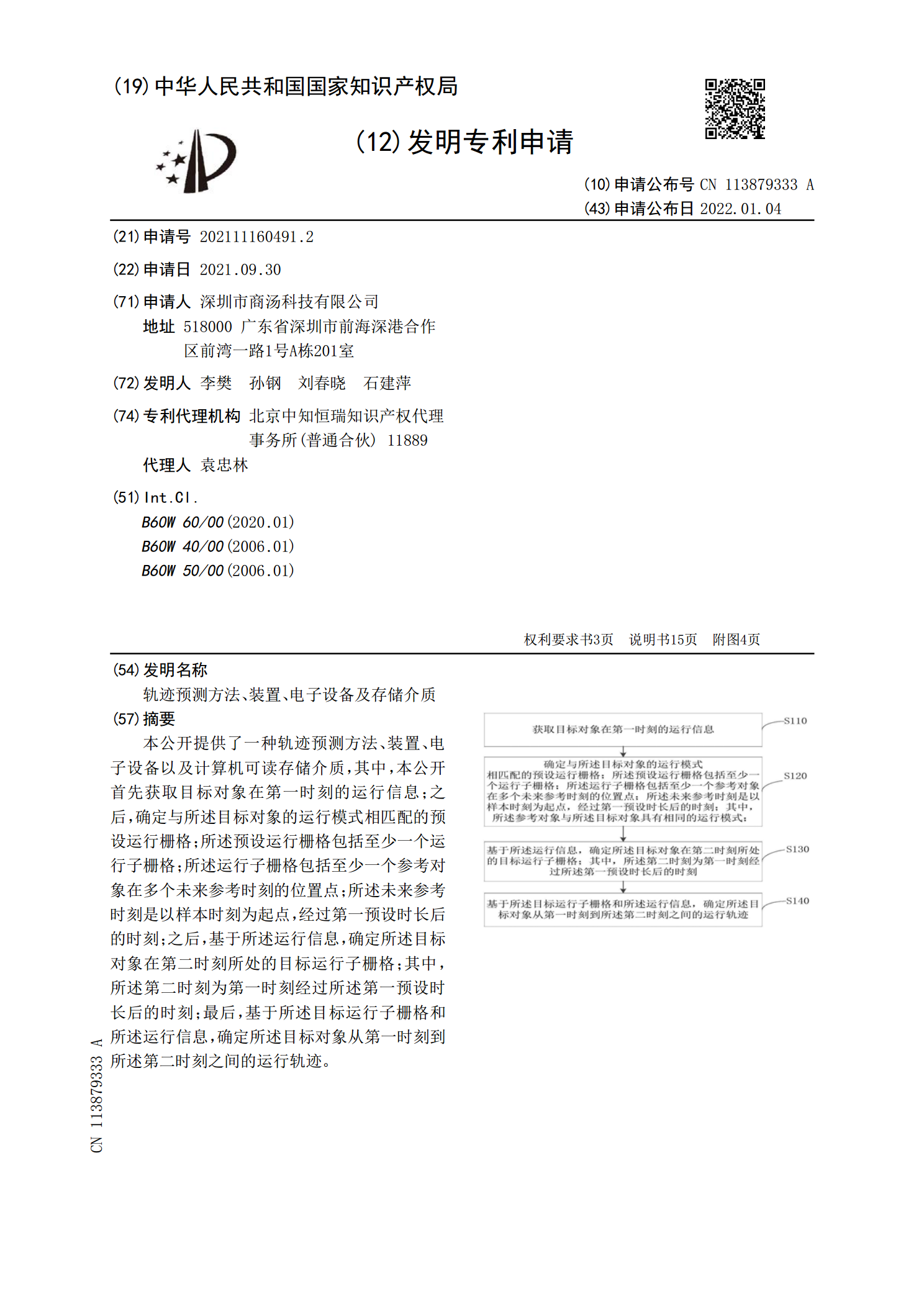
轨迹预测方法、装置、电子设备及存储介质.pdf
本公开提供了一种轨迹预测方法、装置、电子设备以及计算机可读存储介质,其中,本公开首先获取目标对象在第一时刻的运行信息;之后,确定与所述目标对象的运行模式相匹配的预设运行栅格;所述预设运行栅格包括至少一个运行子栅格;所述运行子栅格包括至少一个参考对象在多个未来参考时刻的位置点;所述未来参考时刻是以样本时刻为起点,经过第一预设时长后的时刻;之后,基于所述运行信息,确定所述目标对象在第二时刻所处的目标运行子栅格;其中,所述第二时刻为第一时刻经过所述第一预设时长后的时刻;最后,基于所述目标运行子栅格和所述运行信息