
一种车辆控制方法、装置、设备及存储介质.pdf

一吃****昕靓

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆控制方法、装置、存储介质及车辆.pdf
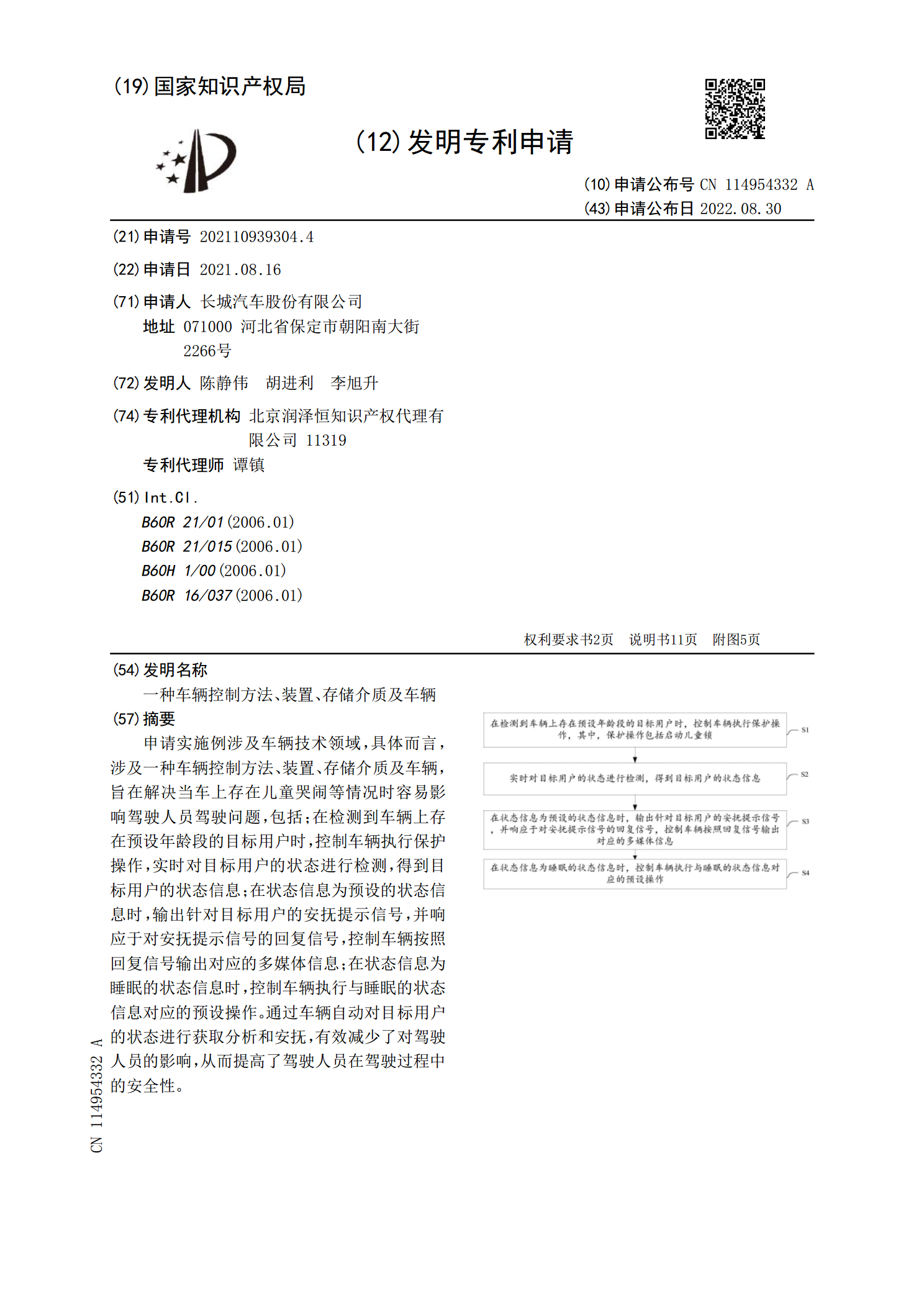
申请实施例涉及车辆技术领域,具体而言,涉及一种车辆控制方法、装置、存储介质及车辆,旨在解决当车上存在儿童哭闹等情况时容易影响驾驶人员驾驶问题,包括;在检测到车辆上存在预设年龄段的目标用户时,控制车辆执行保护操作,实时对目标用户的状态进行检测,得到目标用户的状态信息;在状态信息为预设的状态信息时,输出针对目标用户的安抚提示信号,并响应于对安抚提示信号的回复信号,控制车辆按照回复信号输出对应的多媒体信息;在状态信息为睡眠的状态信息时,控制车辆执行与睡眠的状态信息对应的预设操作。通过车辆自动对目标用户的状态进行
一种车辆控制方法、装置、设备及存储介质.pdf
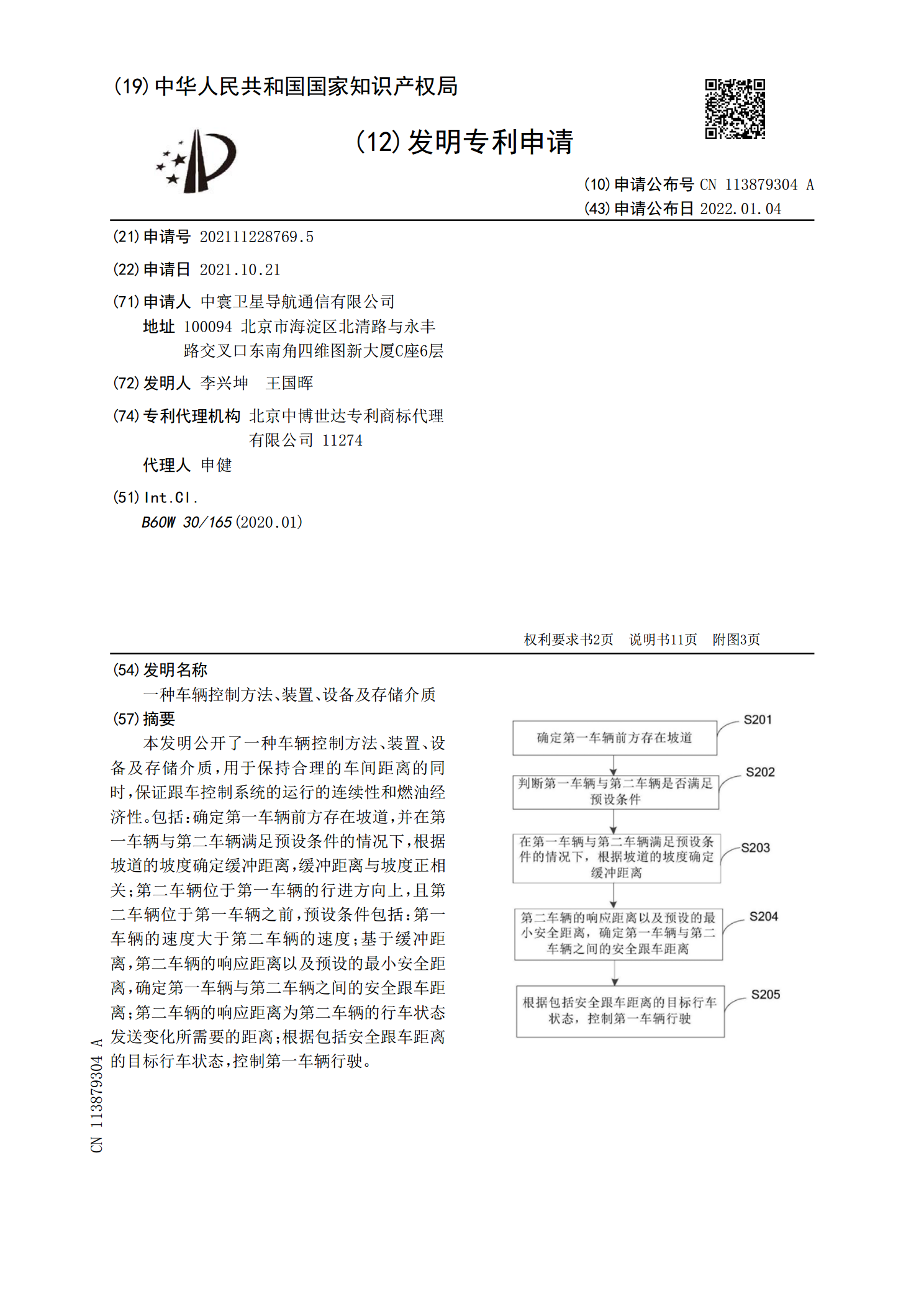
本发明公开了一种车辆控制方法、装置、设备及存储介质,用于保持合理的车间距离的同时,保证跟车控制系统的运行的连续性和燃油经济性。包括:确定第一车辆前方存在坡道,并在第一车辆与第二车辆满足预设条件的情况下,根据坡道的坡度确定缓冲距离,缓冲距离与坡度正相关;第二车辆位于第一车辆的行进方向上,且第二车辆位于第一车辆之前,预设条件包括:第一车辆的速度大于第二车辆的速度;基于缓冲距离,第二车辆的响应距离以及预设的最小安全距离,确定第一车辆与第二车辆之间的安全跟车距离;第二车辆的响应距离为第二车辆的行车状态发送变化所需
一种车辆控制方法、装置、设备及存储介质.pdf
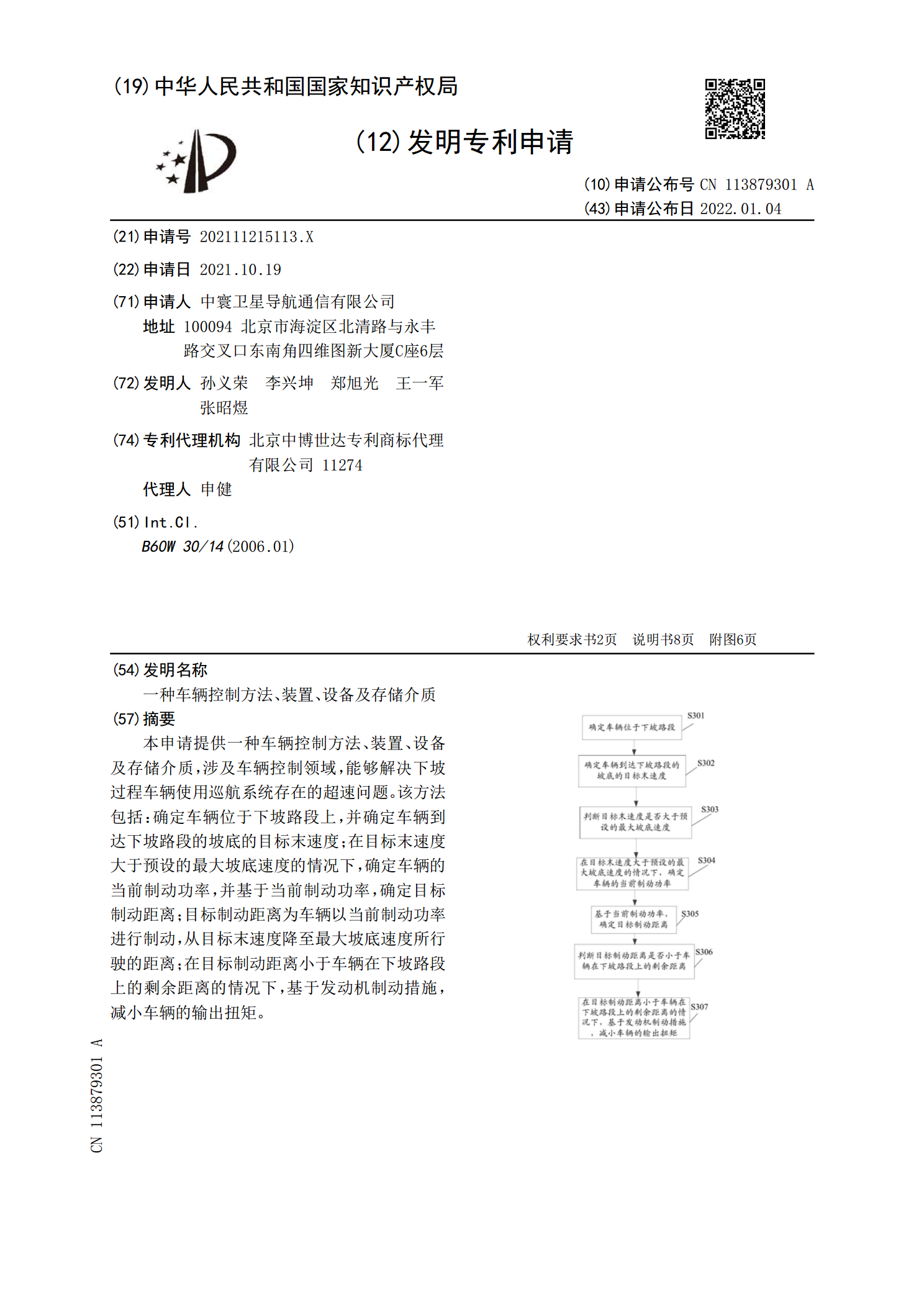
本申请提供一种车辆控制方法、装置、设备及存储介质,涉及车辆控制领域,能够解决下坡过程车辆使用巡航系统存在的超速问题。该方法包括:确定车辆位于下坡路段上,并确定车辆到达下坡路段的坡底的目标末速度;在目标末速度大于预设的最大坡底速度的情况下,确定车辆的当前制动功率,并基于当前制动功率,确定目标制动距离;目标制动距离为车辆以当前制动功率进行制动,从目标末速度降至最大坡底速度所行驶的距离;在目标制动距离小于车辆在下坡路段上的剩余距离的情况下,基于发动机制动措施,减小车辆的输出扭矩。

一种车辆控制方法、装置、存储介质及设备.pdf
本申请实施例提供一种车辆控制方法、装置、存储介质及设备,该方法中,接收到锁车信号时,若车内存在人员,则检测当前车内的氧气浓度以及滞留人员的体感温度,以此确定车内环境是否满足预设安全条件,进而在检测结果为不满足预设安全条件的情况下,执行控制车辆空调以预设模式运行的主动安全措施。这样,通过车内氧气浓度和人员生命特征的监测,以及主动安全措施的设置,可以有效避免因驾乘人员未及时救援而导致滞留人员出现窒息或热伤害的情况,可靠性较高。

一种控制车辆行驶的方法、装置、设备及存储介质.pdf
本申请实施例公开了一种控制车辆行驶的方法、装置、设备及存储介质,属于车辆智能驾驶技术领域,可在高速、港口、矿山、城市交通等弯道、或有风的道路、或有风的弯道等场景下应用,该方法包括:在车辆行驶过程中,基于车辆行驶参数集合确定目标调整信息,通过目标调整信息,对车辆的行驶变量进行调整,即在目标调整信息和行驶变量为不同参数时,分别应用第一降速信息和第二降速信息、第一阻尼信息和第二阻尼信息和/或转向信息组成的车辆行驶参数集合来确定行驶速度、行驶姿态和/或行驶方向,从而实现了对弯道和/或侧风影响下的车辆的单独控制,能