
一种自动引导车控制方法及系统.pdf

戊午****jj


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动引导车控制方法及系统.pdf
本发明公开了一种自动引导车控制方法及系统。自动引导车控制方法包括:向自动引导车发送状态请求信息,获取自动引导车的状态信息;根据状态信息确定自动引导车为空闲状态时,根据任务的类型,控制自动引导车搬运容器或导引用户至对应的目的点位置,控制自动引导车完成任务。本发明达到了自动引导车可以完成多种类型的任务,可以满足多种作业场景的需求的效果。

一种自动引导车系统.pdf
本发明公开一种自动引导车系统,包括自动引导车和轨道,所述自动引导车包括车架、车轮、电动机、第一转动轴和控制电路,所述车轮、电动机、第一转动轴和控制电路分别固定在车架上,且电动机与控制电路电性连接,所述车架上设有两个第一轴承,所述车轮包括一个万向轮和两个驱动轮,每个驱动轮与一个第一转动轴的一端固定连接,第一转动轴的另一端与车架通过一个第一轴承连接,所述电动机上设有第二转动轴,第一转动轴和第二转动轴之间通过环形链条传动式连接。所述轨道为条状可粘性反光纸,且轨道每个部位的宽度相等。本发明中的轨道便于铺设,整个自

自动引导车的控制方法、智能充电系统和智能仓库.pdf
本公开提供了一种引导自动引导车的控制方法,其中所述自动引导车包括车体和位于车体侧表面上的充电口,所述方法包括:S101:控制所述自动引导车行进到靠近充电桩的预设位置处;S102:在所述预设位置处,调整所述自动引导车的位姿,使得所述充电口与所述充电桩的充电头相对;和S103:控制所述自动引导车朝向所述充电桩行进,使所示充电口与所述充电头接合。本发明实施例的优点包括但不限于:缩短AGV不可靠移动的距离,降低车轮与地面打滑的影响;尽可能的实现AGV在自动充电区域的避障,降低碰撞的危险;提高AGV最终充电停车点的
一种无线射频自动引导车的导航装置及控制方法.pdf
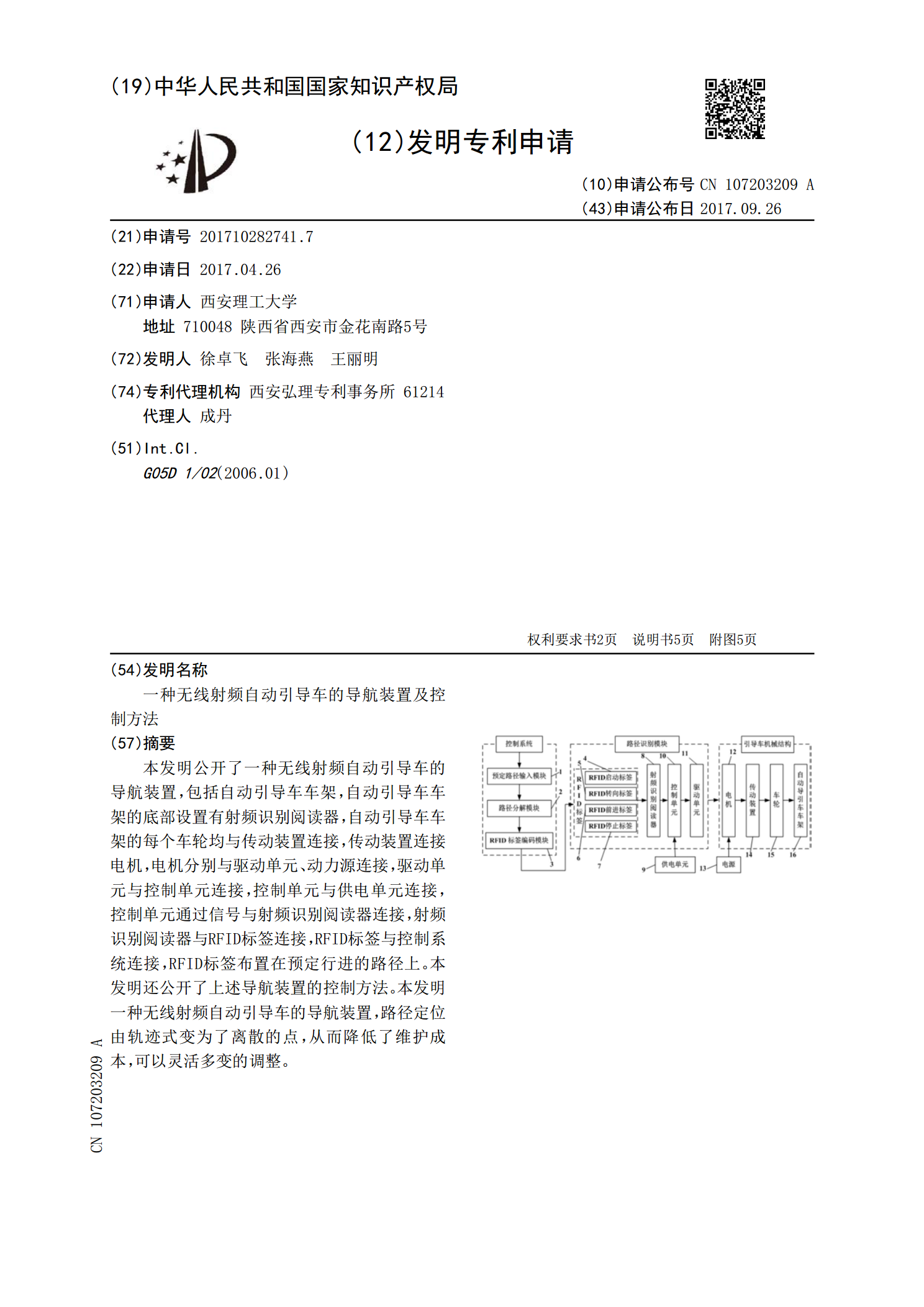
本发明公开了一种无线射频自动引导车的导航装置,包括自动引导车车架,自动引导车车架的底部设置有射频识别阅读器,自动引导车车架的每个车轮均与传动装置连接,传动装置连接电机,电机分别与驱动单元、动力源连接,驱动单元与控制单元连接,控制单元与供电单元连接,控制单元通过信号与射频识别阅读器连接,射频识别阅读器与RFID标签连接,RFID标签与控制系统连接,RFID标签布置在预定行进的路径上。本发明还公开了上述导航装置的控制方法。本发明一种无线射频自动引导车的导航装置,路径定位由轨迹式变为了离散的点,从而降低了维护成
自动引导运输车及其控制方法.pdf
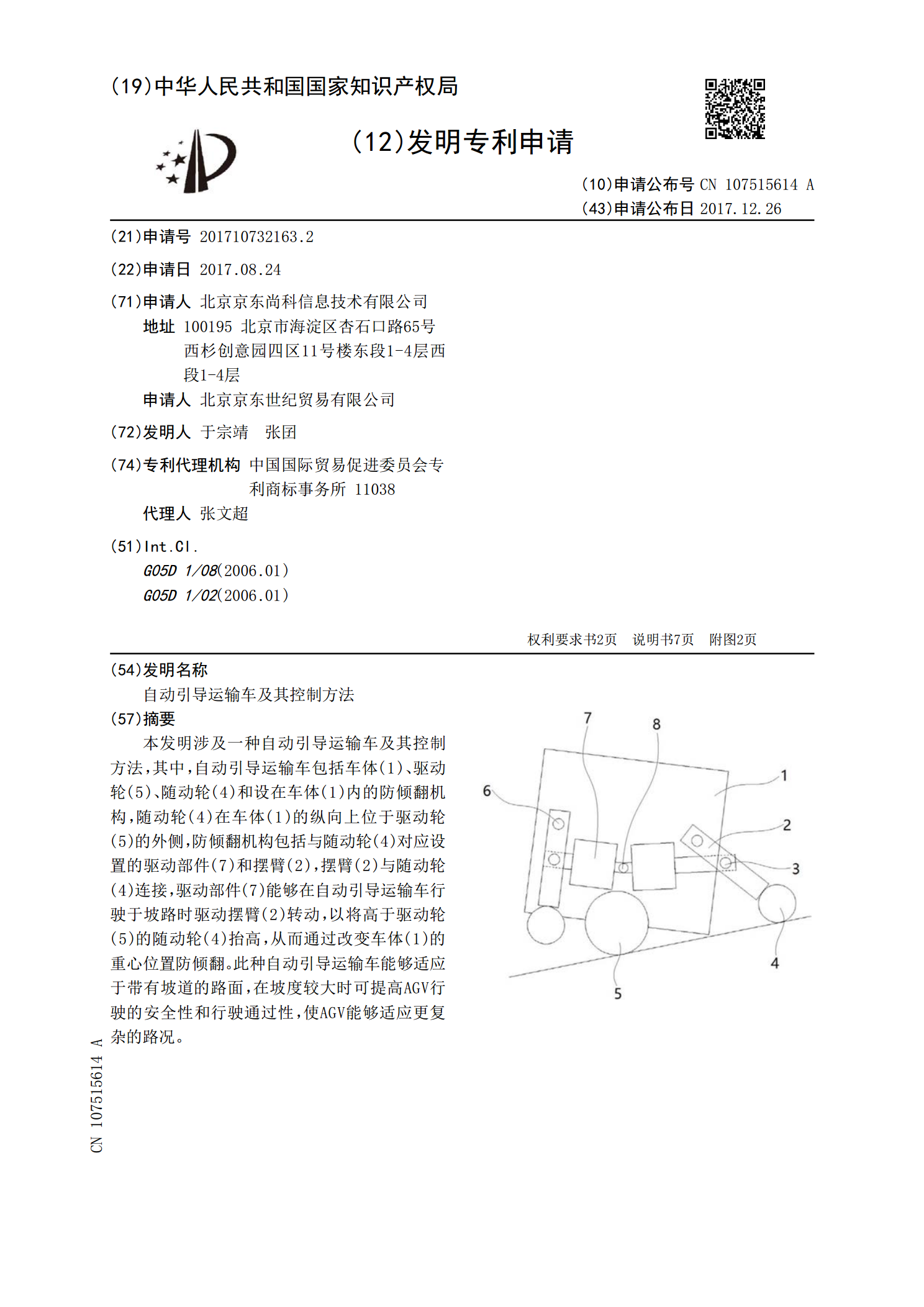
本发明涉及一种自动引导运输车及其控制方法,其中,自动引导运输车包括车体(1)、驱动轮(5)、随动轮(4)和设在车体(1)内的防倾翻机构,随动轮(4)在车体(1)的纵向上位于驱动轮(5)的外侧,防倾翻机构包括与随动轮(4)对应设置的驱动部件(7)和摆臂(2),摆臂(2)与随动轮(4)连接,驱动部件(7)能够在自动引导运输车行驶于坡路时驱动摆臂(2)转动,以将高于驱动轮(5)的随动轮(4)抬高,从而通过改变车体(1)的重心位置防倾翻。此种自动引导运输车能够适应于带有坡道的路面,在坡度较大时可提高AGV行驶的安