
一种相控阵雷达过顶目标自适应跟踪方法.pdf

是你****盟主

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种相控阵雷达过顶目标自适应跟踪方法.pdf
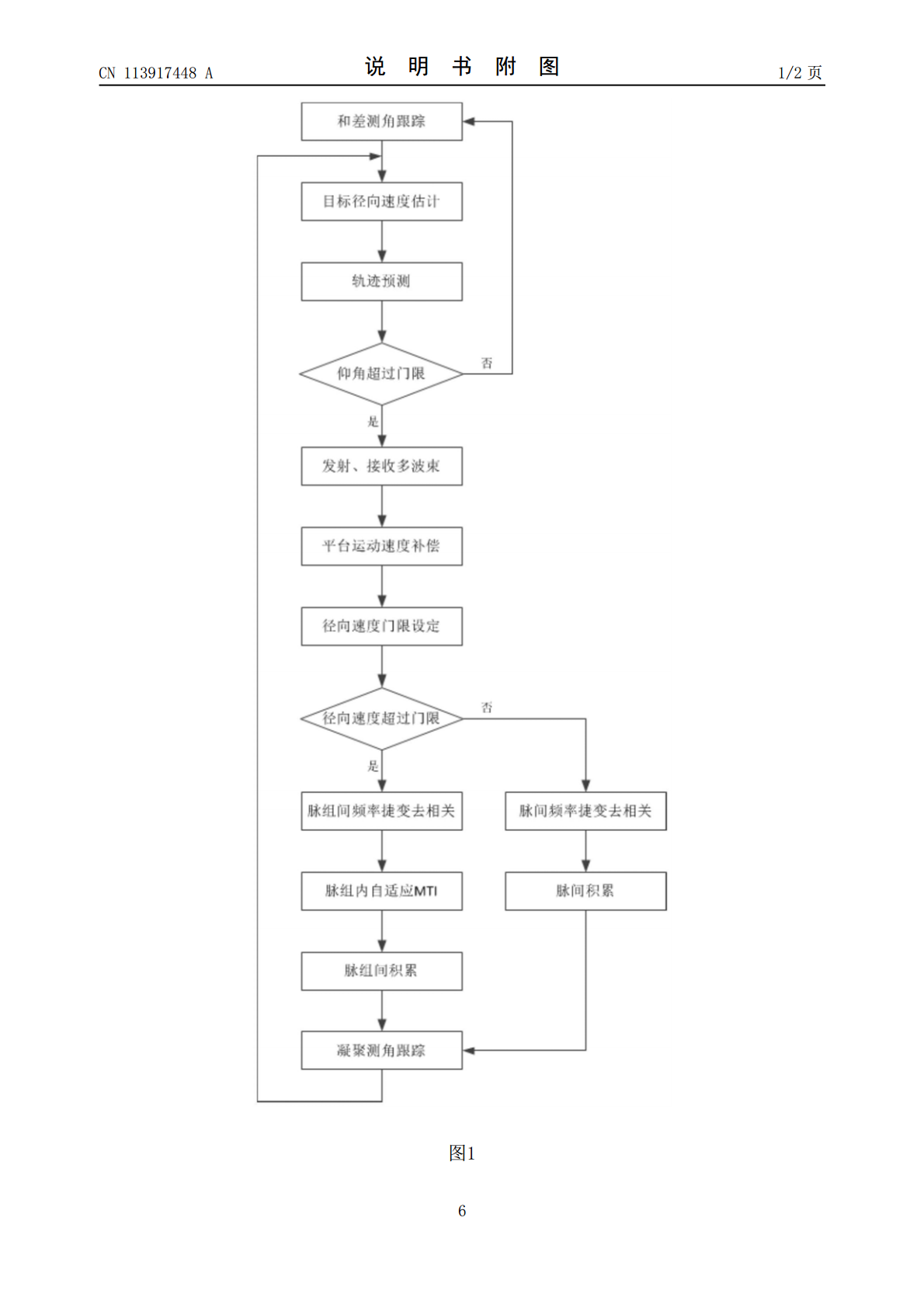
本发明涉及一种相控阵雷达过顶目标自适应跟踪方法,由阵面倾角和波束扫描范围得到目标仰角门限值,目标仰角值小于仰角门限值时采用和差波束测角方式跟踪,目标仰角值大于仰角门限值时采用目标过顶跟踪方式;过顶跟踪时发射接收均采用多波束形式;补偿雷达平台运动造成的多普勒频移,由杂波最大多普勒频率得到目标径向速度门限值,目标径向速度大于径向速度门限值时通过脉组间频率捷变,脉组内自适应MTI,脉组间积累来实现去杂波和目标回波的检测;径向速度小于径向速度门限值时通过脉间频率捷变和脉间积累实现去杂波和目标回波的检测;最后以目标

一种被动相控阵雷达自适应辐射源跟踪调度方法.pdf
本发明为一种被动相控阵雷达自适应辐射源跟踪调度方法,用于解决被动雷达和辐射源同时扫描情况下,雷达与辐射源时域失配导致的目标截获时间长、目标跟踪不稳定问题。在被动雷达已截获数据能够进行辐射源扫描周期估计情况下,采用基于辐射源扫描周期的跟踪任务调度算法,并根据截获的作战目标特性调整驻留时间、数据率等跟踪参数。当辐射源失更或先验信息不足无法估计扫描周期时,采用基于长时驻留与任务颗粒度拆解相结合的跟踪调度方法实现对目标的重新截获并稳定跟踪。两种方法可根据目标截获情况及调度资源情况自适应进行切换。该方法能有效缩短目
解决球面相控阵天线跟踪过顶盲捕目标的方法.pdf
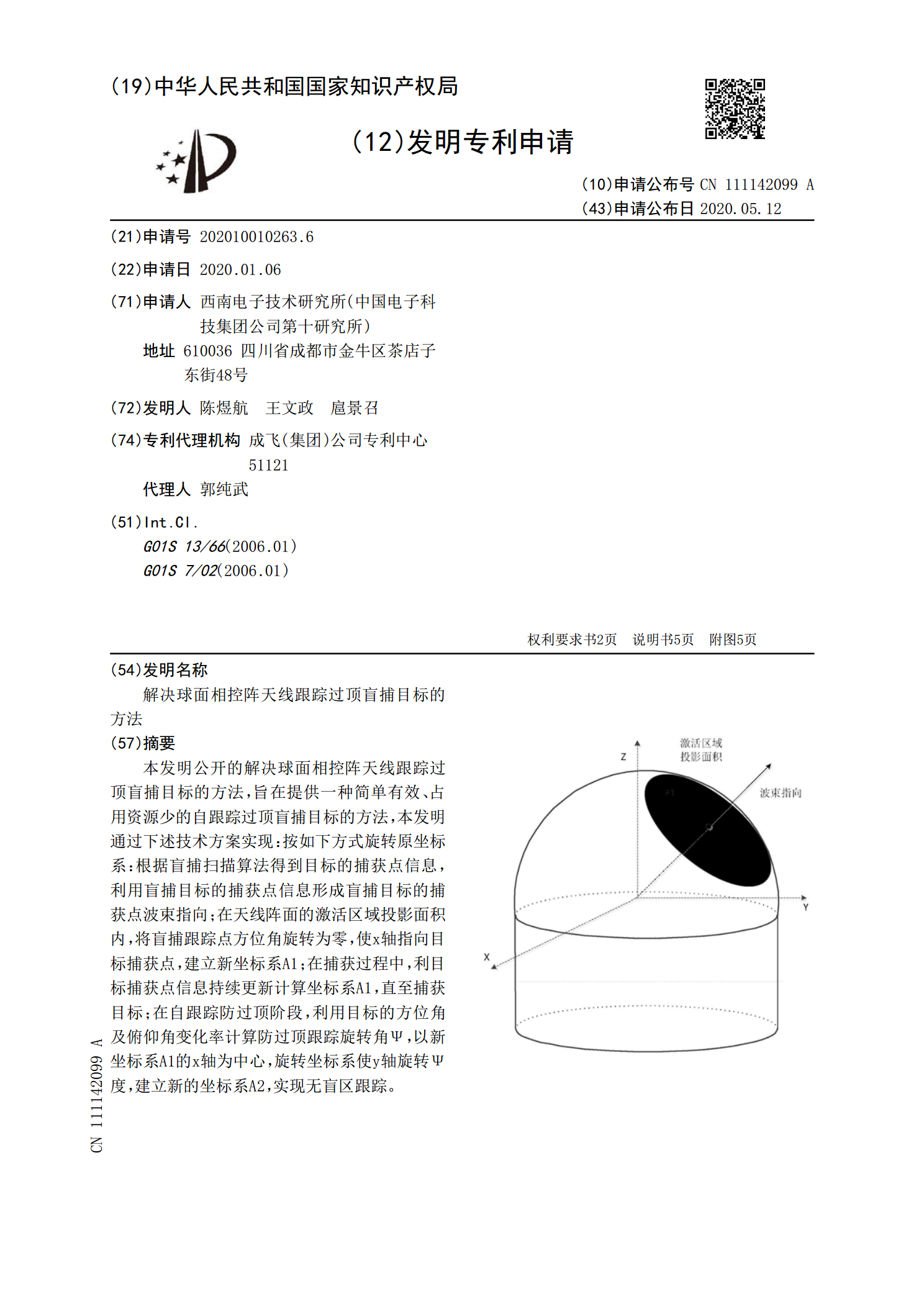
本发明公开的解决球面相控阵天线跟踪过顶盲捕目标的方法,旨在提供一种简单有效、占用资源少的自跟踪过顶盲捕目标的方法,本发明通过下述技术方案实现:按如下方式旋转原坐标系:根据盲捕扫描算法得到目标的捕获点信息,利用盲捕目标的捕获点信息形成盲捕目标的捕获点波束指向;在天线阵面的激活区域投影面积内,将盲捕跟踪点方位角旋转为零,使x轴指向目标捕获点,建立新坐标系A1;在捕获过程中,利目标捕获点信息持续更新计算坐标系A1,直至捕获目标;在自跟踪防过顶阶段,利用目标的方位角及俯仰角变化率计算防过顶跟踪旋转角Ψ,以新坐标系

一种基于线性序贯滤波的相控阵雷达目标跟踪方法.pdf
本发明属于相控阵雷达目标跟踪领域,特别涉及利用多普勒量测信息的目标跟踪系统及方法。本发明利用完全线性的量测矩阵,提出了一种基于线性序贯滤波的相控阵雷达目标跟踪方法(DUCMKF‑LSQ)。在求解相关算法时,首先利用基于位置量测信息转换,得到目标的位置滤波状态估计结果;然后通过位置滤波结果提取目标角度估计信息,构造线性的径向速度量测矩阵;最后经由推导出的线性量测矩阵,用径向速度量测对位置量测的滤波结果进行线性序贯滤波,获得最终的目标状态估计结果。
旋转相控阵雷达基于目标先验参数的变数据率跟踪方法.pdf
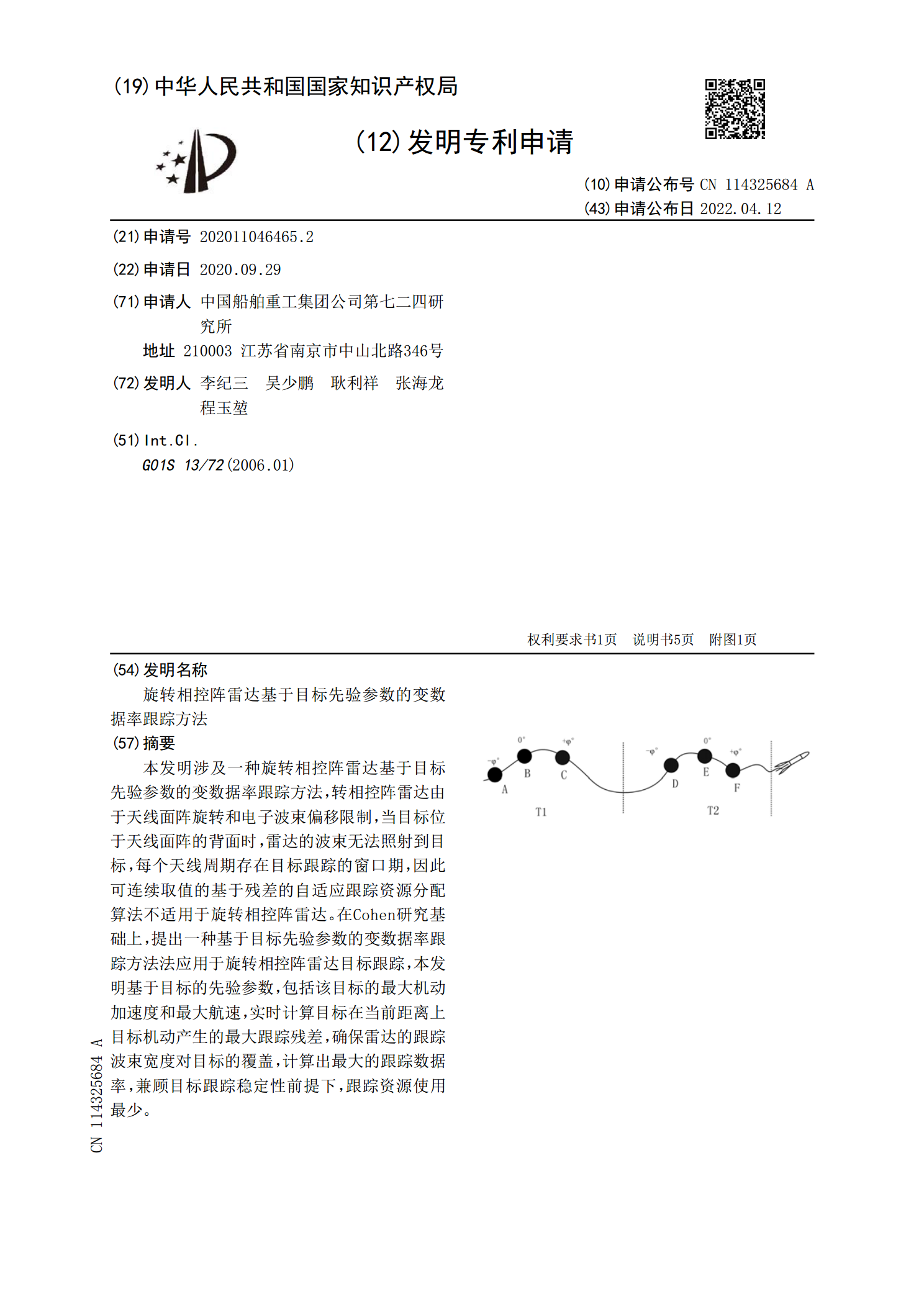
本发明涉及一种旋转相控阵雷达基于目标先验参数的变数据率跟踪方法,转相控阵雷达由于天线面阵旋转和电子波束偏移限制,当目标位于天线面阵的背面时,雷达的波束无法照射到目标,每个天线周期存在目标跟踪的窗口期,因此可连续取值的基于残差的自适应跟踪资源分配算法不适用于旋转相控阵雷达。在Cohen研究基础上,提出一种基于目标先验参数的变数据率跟踪方法法应用于旋转相控阵雷达目标跟踪,本发明基于目标的先验参数,包括该目标的最大机动加速度和最大航速,实时计算目标在当前距离上目标机动产生的最大跟踪残差,确保雷达的跟踪波束宽度对