
解决球面相控阵天线跟踪过顶盲捕目标的方法.pdf

白凡****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
解决球面相控阵天线跟踪过顶盲捕目标的方法.pdf
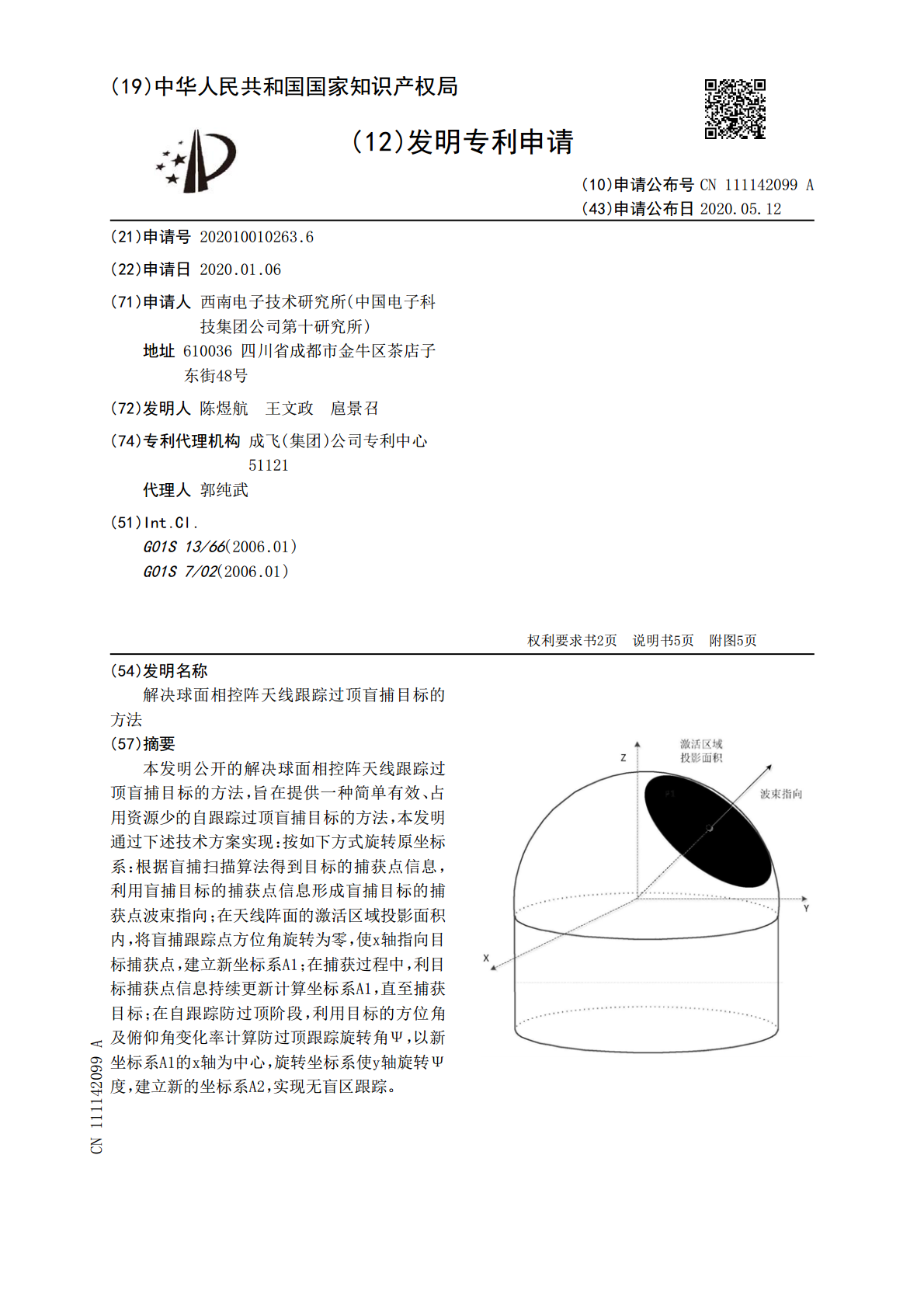
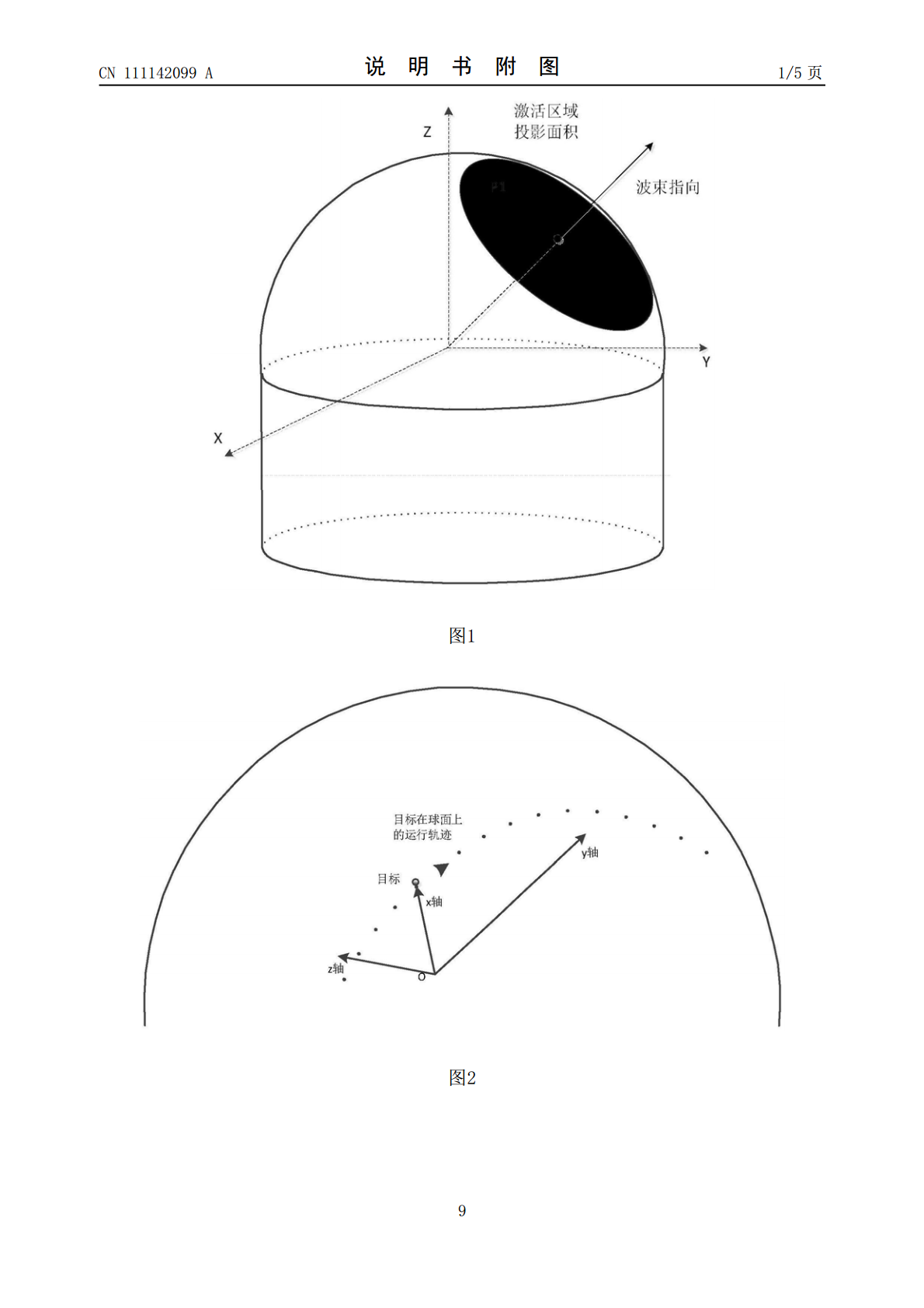
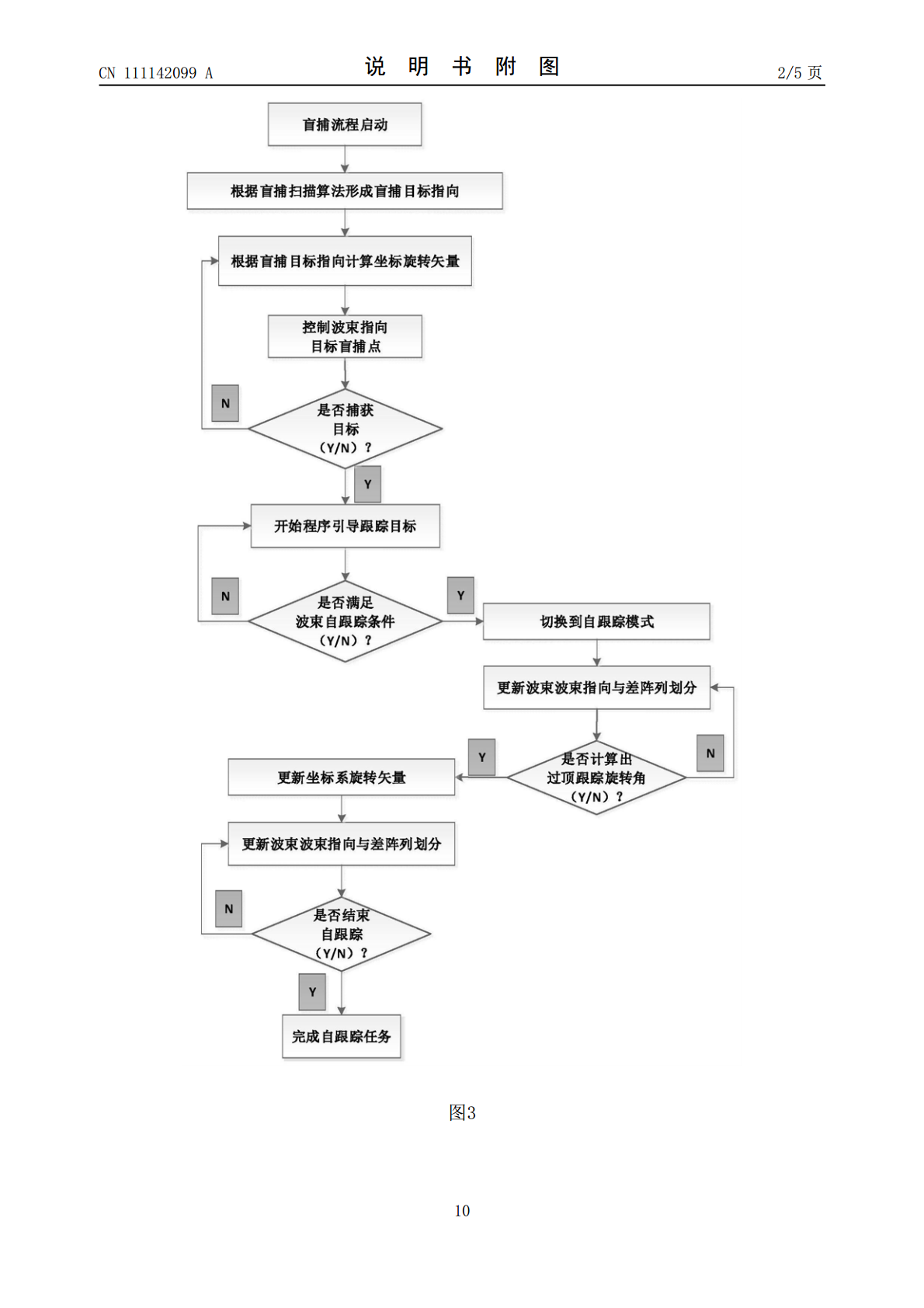
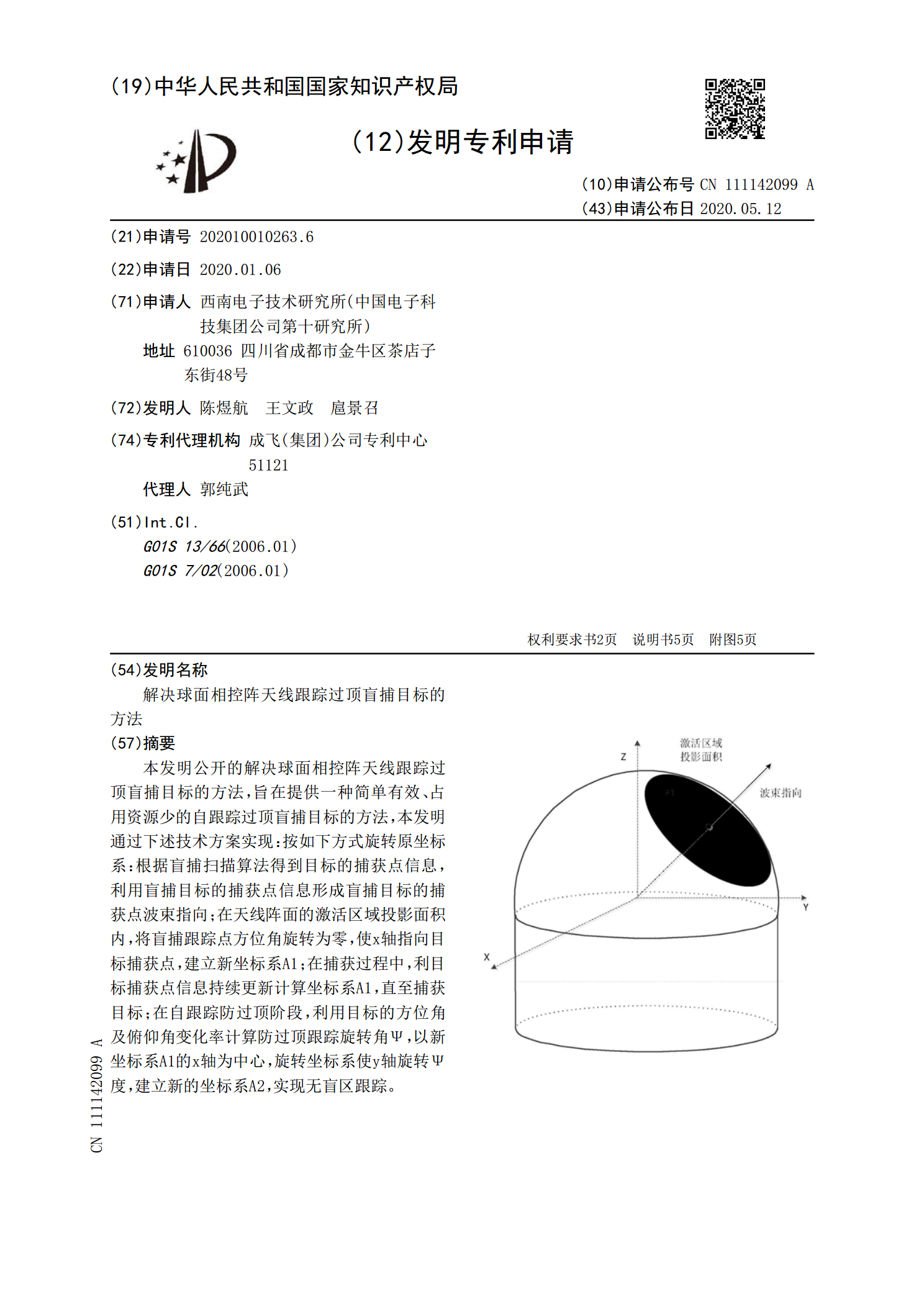
本发明公开的解决球面相控阵天线跟踪过顶盲捕目标的方法,旨在提供一种简单有效、占用资源少的自跟踪过顶盲捕目标的方法,本发明通过下述技术方案实现:按如下方式旋转原坐标系:根据盲捕扫描算法得到目标的捕获点信息,利用盲捕目标的捕获点信息形成盲捕目标的捕获点波束指向;在天线阵面的激活区域投影面积内,将盲捕跟踪点方位角旋转为零,使x轴指向目标捕获点,建立新坐标系A1;在捕获过程中,利目标捕获点信息持续更新计算坐标系A1,直至捕获目标;在自跟踪防过顶阶段,利用目标的方位角及俯仰角变化率计算防过顶跟踪旋转角Ψ,以新坐标系
一种相控阵雷达过顶目标自适应跟踪方法.pdf
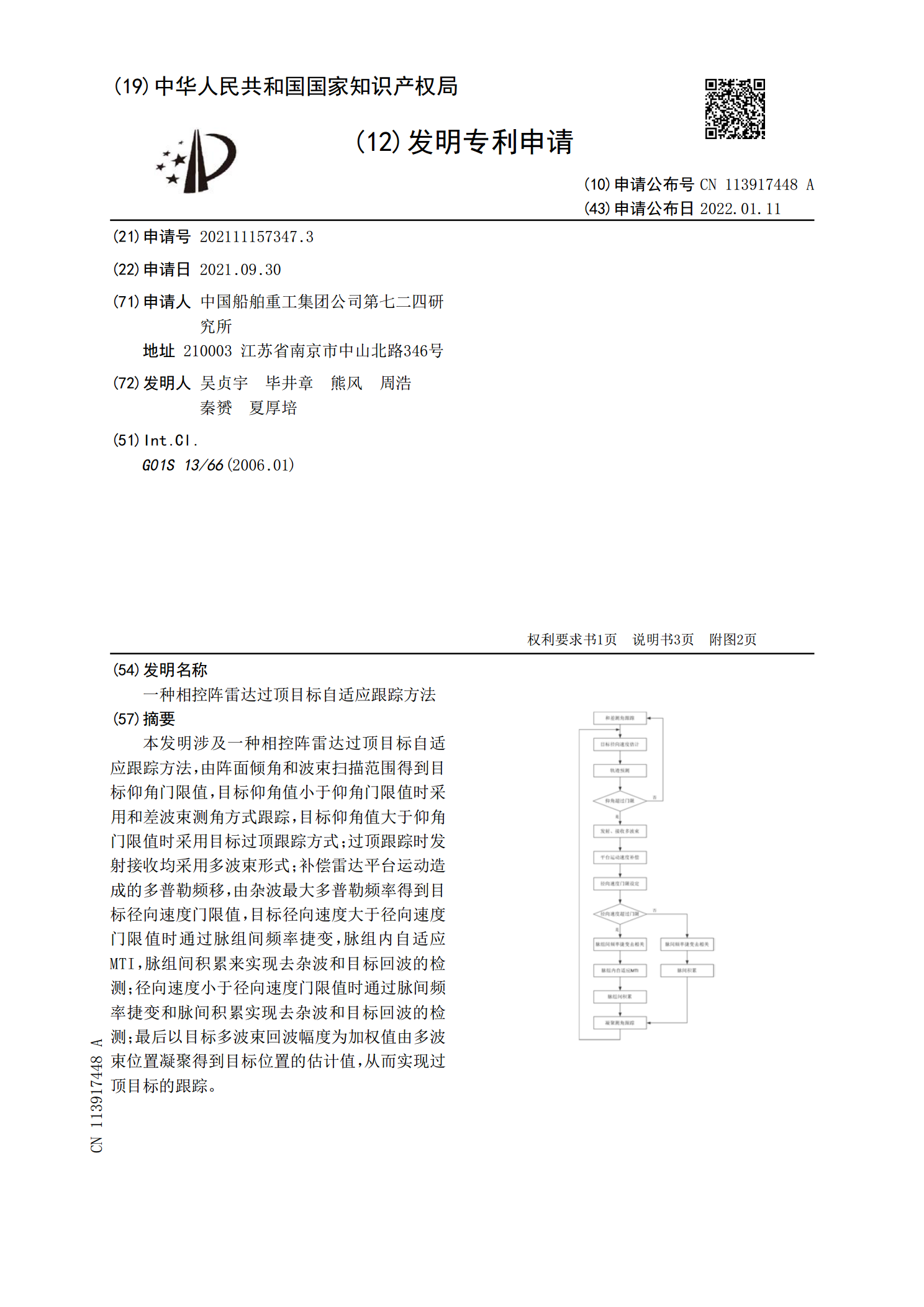
本发明涉及一种相控阵雷达过顶目标自适应跟踪方法,由阵面倾角和波束扫描范围得到目标仰角门限值,目标仰角值小于仰角门限值时采用和差波束测角方式跟踪,目标仰角值大于仰角门限值时采用目标过顶跟踪方式;过顶跟踪时发射接收均采用多波束形式;补偿雷达平台运动造成的多普勒频移,由杂波最大多普勒频率得到目标径向速度门限值,目标径向速度大于径向速度门限值时通过脉组间频率捷变,脉组内自适应MTI,脉组间积累来实现去杂波和目标回波的检测;径向速度小于径向速度门限值时通过脉间频率捷变和脉间积累实现去杂波和目标回波的检测;最后以目标

三轴过顶跟踪天线的研制的综述报告.docx
三轴过顶跟踪天线的研制的综述报告三轴过顶跟踪天线是一种高精度的天线系统,用于追踪卫星、飞机、导弹、船舶等移动目标。该系统具有高度的精度、可靠性和灵活性,可广泛应用于军事、航空、航天、海洋等领域。在本文中,将介绍三轴过顶跟踪天线的研制现状和进展,并探讨其未来的发展方向。三轴过顶跟踪天线的原理是利用旋转结构使天线系统可以自由转动来跟随移动目标,同时可以通过电子设备控制天线的方向、俯仰角和滚转角度,实现对目标的精确跟踪。该系统有着高精度、高稳定性和高反应速度的特点,可以在极端情况下进行快速响应和动态调整,具有非
基于相控阵的混合扫描天线跟踪方法、系统、终端及介质.pdf
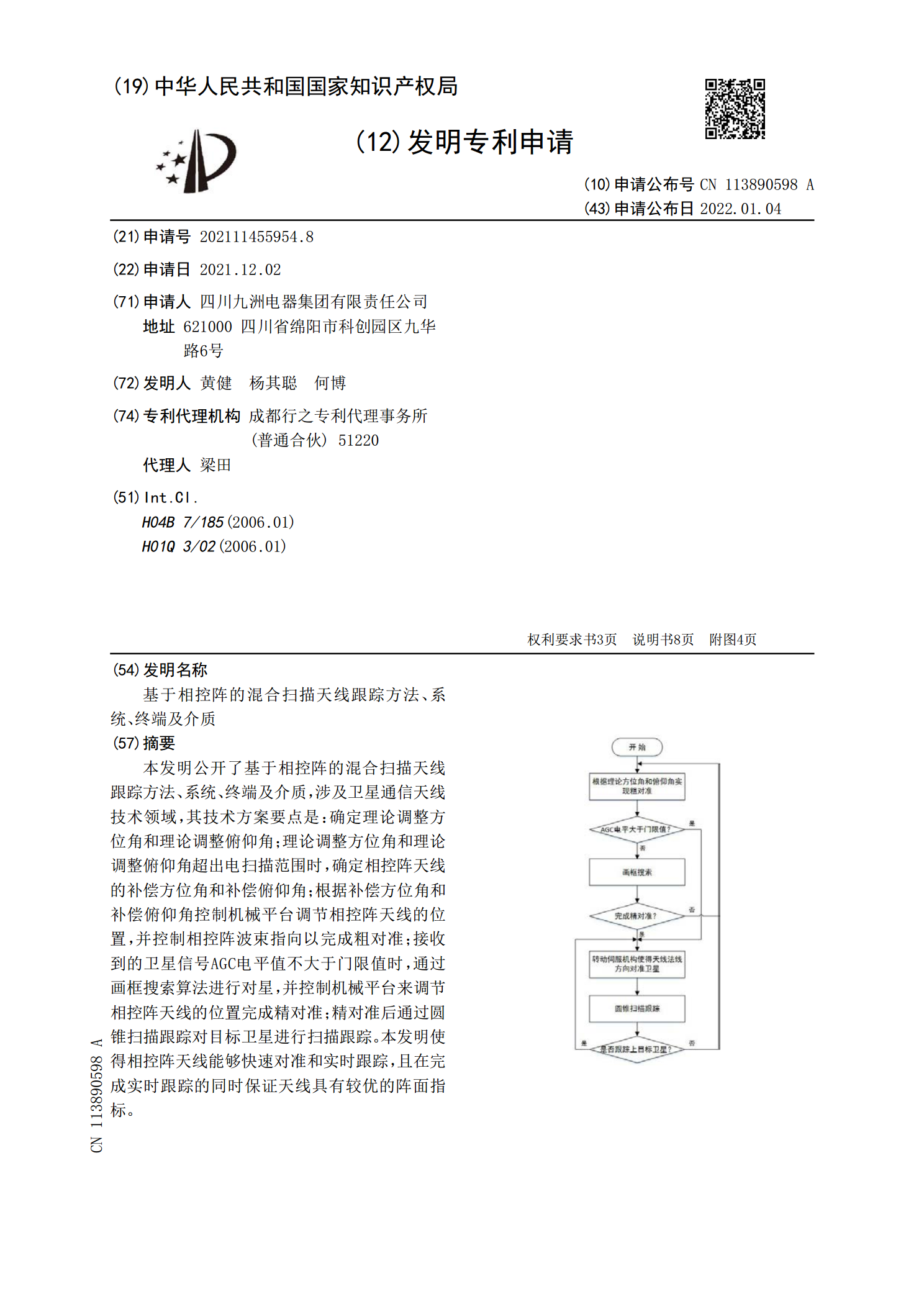
本发明公开了基于相控阵的混合扫描天线跟踪方法、系统、终端及介质,涉及卫星通信天线技术领域,其技术方案要点是:确定理论调整方位角和理论调整俯仰角;理论调整方位角和理论调整俯仰角超出电扫描范围时,确定相控阵天线的补偿方位角和补偿俯仰角;根据补偿方位角和补偿俯仰角控制机械平台调节相控阵天线的位置,并控制相控阵波束指向以完成粗对准;接收到的卫星信号AGC电平值不大于门限值时,通过画框搜索算法进行对星,并控制机械平台来调节相控阵天线的位置完成精对准;精对准后通过圆锥扫描跟踪对目标卫星进行扫描跟踪。本发明使得相控阵天

相控阵天线辐射阵列、相控阵天线.pdf
本发明属于天线微波技术领域,为解决因波束扫描而产生的高次模式导致的盲点效应,本发明提供了一种相控阵天线辐射阵列,辐射阵列包括按周期排列的若干辐射单元,辐射单元上设置有栅格,栅格用于抑制辐射单元之间高次模式的谐振。通过在按一定周期特性排列的若干辐射单元上分别设置栅格,能够抑制辐射单元之间高次模式的谐振,从而抑制扫描盲点的产生。而且,栅格也能够对辐射单元起到保护的作用,同时不会影响辐射单元的电气性能。