
旋转相控阵雷达基于目标先验参数的变数据率跟踪方法.pdf

佳晨****ng

1/8
2/8

3/8
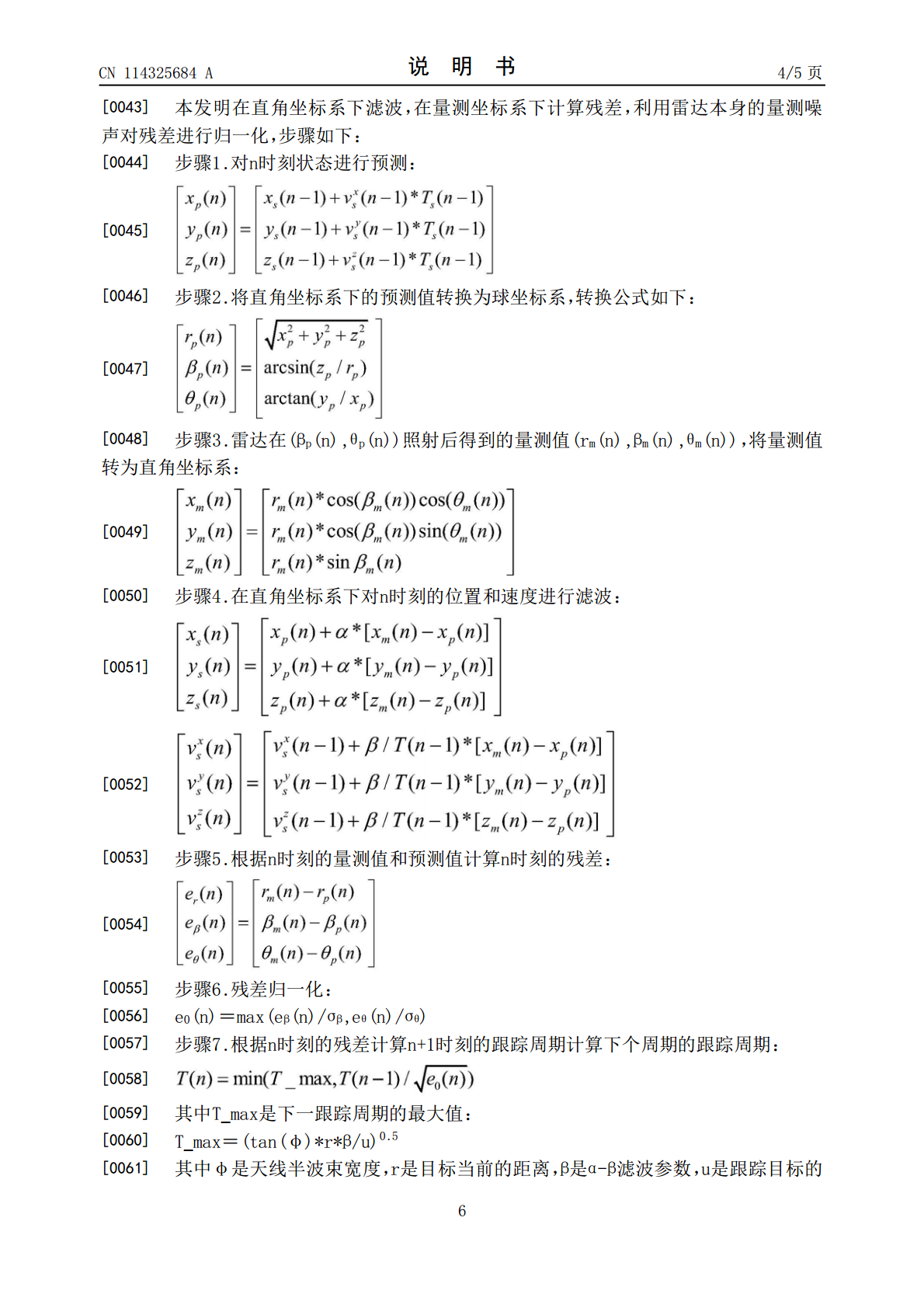
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
旋转相控阵雷达基于目标先验参数的变数据率跟踪方法.pdf
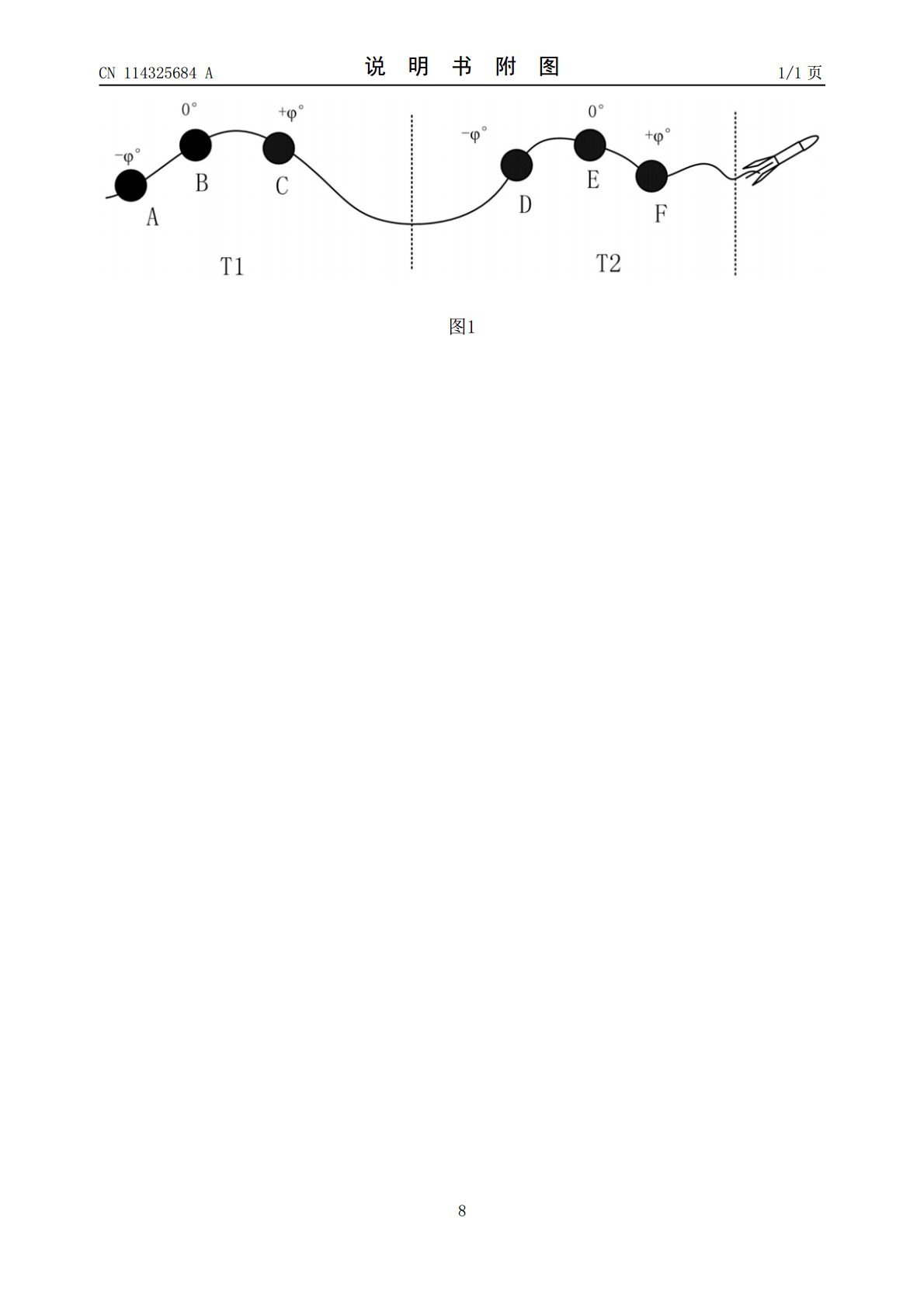
本发明涉及一种旋转相控阵雷达基于目标先验参数的变数据率跟踪方法,转相控阵雷达由于天线面阵旋转和电子波束偏移限制,当目标位于天线面阵的背面时,雷达的波束无法照射到目标,每个天线周期存在目标跟踪的窗口期,因此可连续取值的基于残差的自适应跟踪资源分配算法不适用于旋转相控阵雷达。在Cohen研究基础上,提出一种基于目标先验参数的变数据率跟踪方法法应用于旋转相控阵雷达目标跟踪,本发明基于目标的先验参数,包括该目标的最大机动加速度和最大航速,实时计算目标在当前距离上目标机动产生的最大跟踪残差,确保雷达的跟踪波束宽度对
基于目标跟踪的相控阵雷达波束和驻留时间联合分配方法.pdf
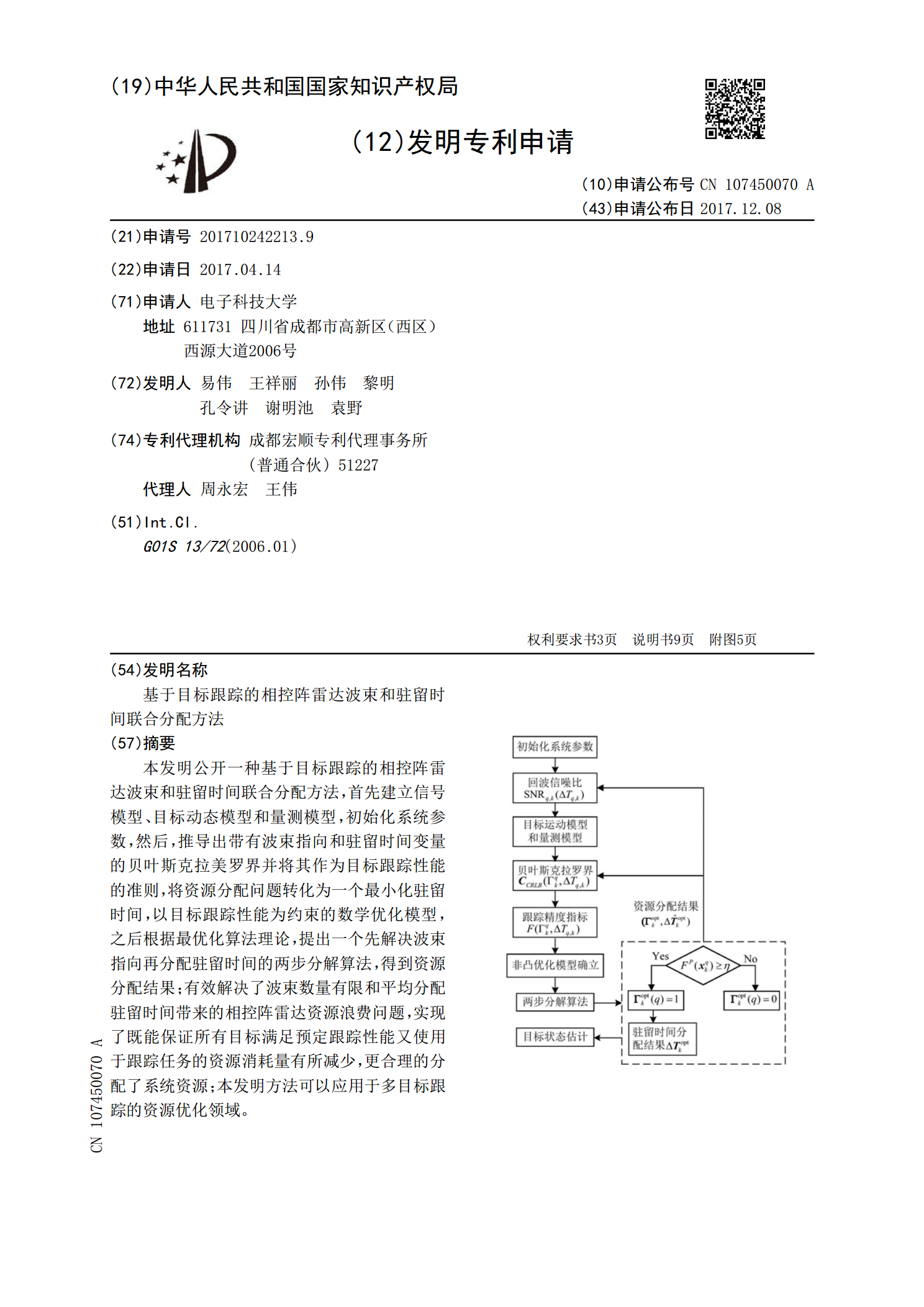
本发明公开一种基于目标跟踪的相控阵雷达波束和驻留时间联合分配方法,首先建立信号模型、目标动态模型和量测模型,初始化系统参数,然后,推导出带有波束指向和驻留时间变量的贝叶斯克拉美罗界并将其作为目标跟踪性能的准则,将资源分配问题转化为一个最小化驻留时间,以目标跟踪性能为约束的数学优化模型,之后根据最优化算法理论,提出一个先解决波束指向再分配驻留时间的两步分解算法,得到资源分配结果;有效解决了波束数量有限和平均分配驻留时间带来的相控阵雷达资源浪费问题,实现了既能保证所有目标满足预定跟踪性能又使用于跟踪任务的资源

一种基于线性序贯滤波的相控阵雷达目标跟踪方法.pdf
本发明属于相控阵雷达目标跟踪领域,特别涉及利用多普勒量测信息的目标跟踪系统及方法。本发明利用完全线性的量测矩阵,提出了一种基于线性序贯滤波的相控阵雷达目标跟踪方法(DUCMKF‑LSQ)。在求解相关算法时,首先利用基于位置量测信息转换,得到目标的位置滤波状态估计结果;然后通过位置滤波结果提取目标角度估计信息,构造线性的径向速度量测矩阵;最后经由推导出的线性量测矩阵,用径向速度量测对位置量测的滤波结果进行线性序贯滤波,获得最终的目标状态估计结果。
一种相控阵雷达过顶目标自适应跟踪方法.pdf
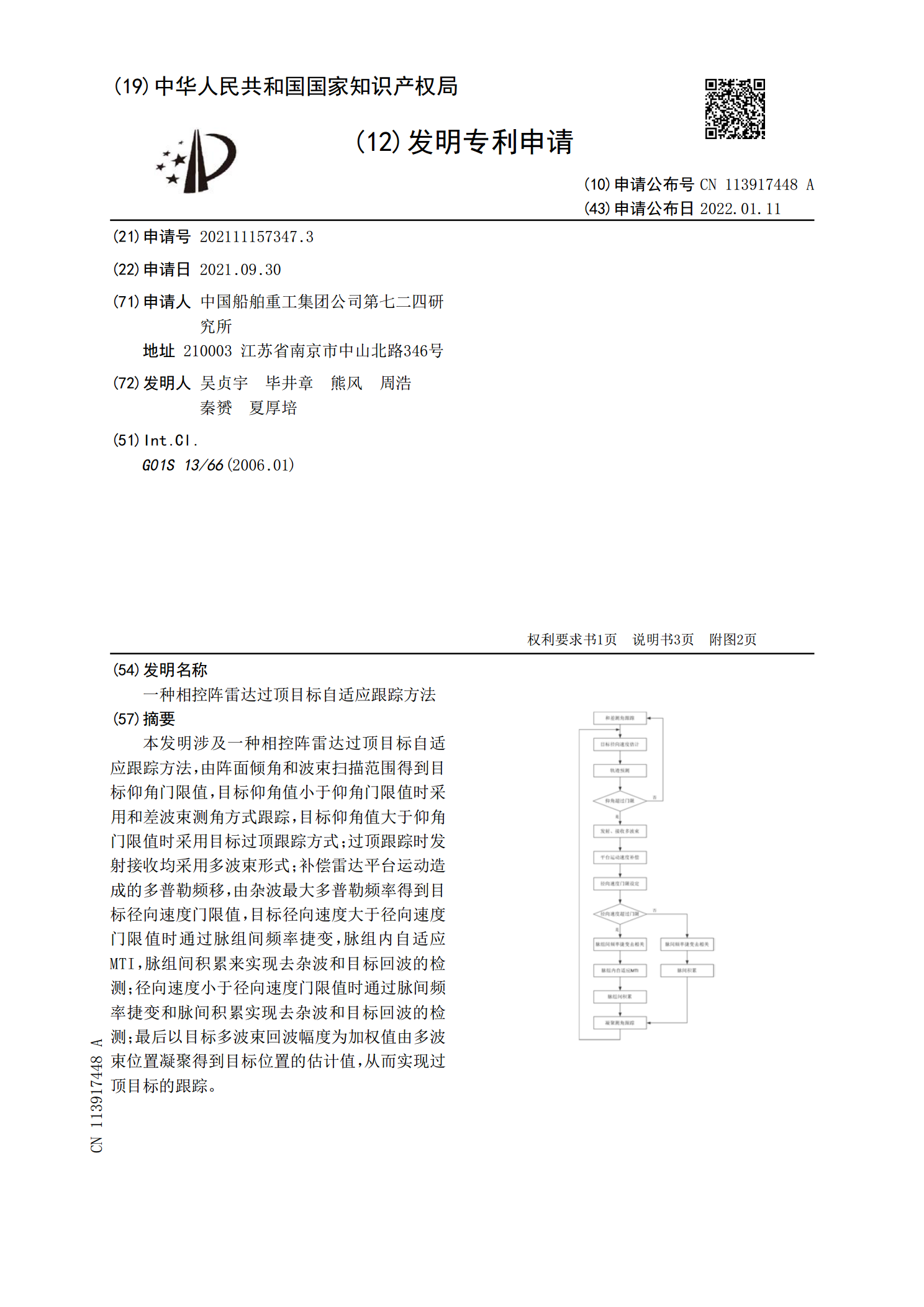
本发明涉及一种相控阵雷达过顶目标自适应跟踪方法,由阵面倾角和波束扫描范围得到目标仰角门限值,目标仰角值小于仰角门限值时采用和差波束测角方式跟踪,目标仰角值大于仰角门限值时采用目标过顶跟踪方式;过顶跟踪时发射接收均采用多波束形式;补偿雷达平台运动造成的多普勒频移,由杂波最大多普勒频率得到目标径向速度门限值,目标径向速度大于径向速度门限值时通过脉组间频率捷变,脉组内自适应MTI,脉组间积累来实现去杂波和目标回波的检测;径向速度小于径向速度门限值时通过脉间频率捷变和脉间积累实现去杂波和目标回波的检测;最后以目标

一种基于多目标跟踪的相控阵雷达组网系统资源管理方法.pdf
该发明公开了一种基于多目标跟踪的相控阵雷达组网系统资源管理方法,属于相控阵雷达组网资源管理技术领域,涉及多目标跟踪。首先研究雷达组网和目标之间的拓扑结构,分析多相控阵雷达组网在多波束工作模式下,对于不同目标,其角度和空间分集增益不同对回波信噪比的影响。然后,在各目标跟踪精度满足预定要求的前提下去优化每个雷达的波束指向及波束驻留时间,使该雷达组网波束用于跟踪的总驻留时间最少。由于目标位置,角度,RCS和雷达组网空间分集增益不同,各个目标为维持预定跟踪精度对系统资源的需求有所变化,造成的若干目标不能被有效跟踪