
一种基于线性序贯滤波的相控阵雷达目标跟踪方法.pdf

靖烟****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于线性序贯滤波的相控阵雷达目标跟踪方法.pdf
本发明属于相控阵雷达目标跟踪领域,特别涉及利用多普勒量测信息的目标跟踪系统及方法。本发明利用完全线性的量测矩阵,提出了一种基于线性序贯滤波的相控阵雷达目标跟踪方法(DUCMKF‑LSQ)。在求解相关算法时,首先利用基于位置量测信息转换,得到目标的位置滤波状态估计结果;然后通过位置滤波结果提取目标角度估计信息,构造线性的径向速度量测矩阵;最后经由推导出的线性量测矩阵,用径向速度量测对位置量测的滤波结果进行线性序贯滤波,获得最终的目标状态估计结果。
一种基于自适应量测矩阵的线性序贯雷达目标跟踪方法.pdf
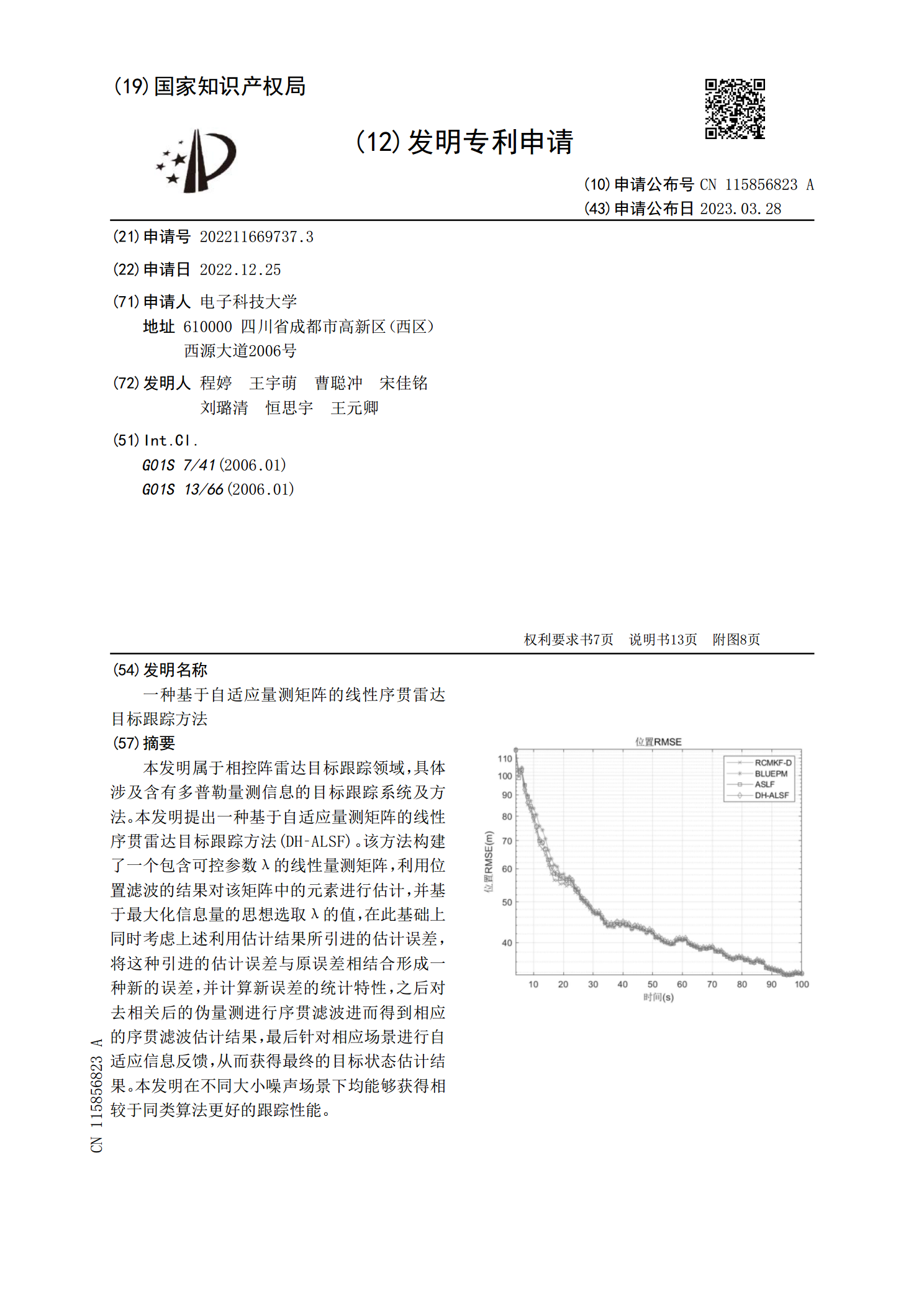
本发明属于相控阵雷达目标跟踪领域,具体涉及含有多普勒量测信息的目标跟踪系统及方法。本发明提出一种基于自适应量测矩阵的线性序贯雷达目标跟踪方法(DH‑ALSF)。该方法构建了一个包含可控参数λ的线性量测矩阵,利用位置滤波的结果对该矩阵中的元素进行估计,并基于最大化信息量的思想选取λ的值,在此基础上同时考虑上述利用估计结果所引进的估计误差,将这种引进的估计误差与原误差相结合形成一种新的误差,并计算新误差的统计特性,之后对去相关后的伪量测进行序贯滤波进而得到相应的序贯滤波估计结果,最后针对相应场景进行自适应信息

一种基于序贯处理的实时相控阵雷达波束驻留调度方法.pdf
本发明属于雷达系统资源管理领域,特别涉及一种基于序贯处理的实时相控阵雷达波束驻留调度方法。本发明首先利用基于时间指针的波束驻留调度算法获得实际执行任务集合、延迟任务集合和删除任务集合,在此基础上对实际执行任务集合进行序贯处理,调整其实际调度执行时刻,从而在保证调度优先级和截止期的同时兼顾了期望执行时间准则。在序贯处理中,本发明通过遍历实际执行任务的全部可能执行顺序,获得了在启发式规则下具有最低的时间偏移率的实际执行任务队列,其中引入分支界定的思想降低了计算复杂度,从而保证了本调度方法的实时性。

基于雷达跟踪系统中非线性滤波线性化的方法.doc
<>全部作者:段晋杰第1作者单位:北京邮电大学电信工程学院论文摘要:本文描述了雷达跟踪系统中非线性滤波线性化的方法,阐述了推广卡尔曼滤波的工作原理,并且通过仿真,比较了推广卡尔曼滤波器在不同噪声强度的影响下滤波精度的变化。仿真结果显示此滤波器在1定噪声强度下的有效性和局限性关键词:卡尔曼滤波非线性滤波雷达跟踪系统(浏览全文)发表日期:2008年03月11日同行评议:(暂时没有)综合评价:(暂时没有)修改稿:<>1.绪论1.1研究背景网络被认为是互联网发展的第三阶段。网络的设计和实施能够带来切身实际的利益,
旋转相控阵雷达基于目标先验参数的变数据率跟踪方法.pdf
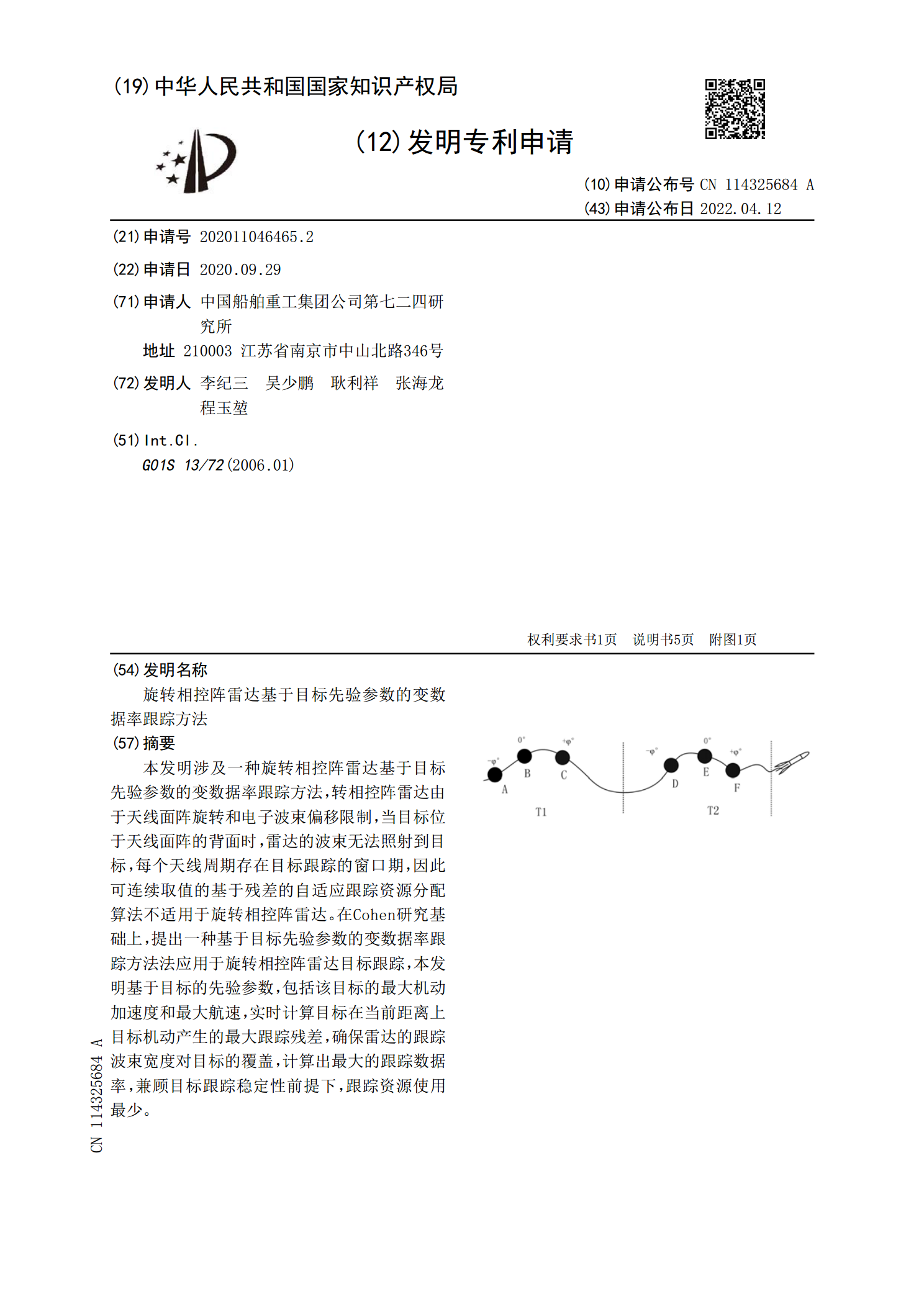
本发明涉及一种旋转相控阵雷达基于目标先验参数的变数据率跟踪方法,转相控阵雷达由于天线面阵旋转和电子波束偏移限制,当目标位于天线面阵的背面时,雷达的波束无法照射到目标,每个天线周期存在目标跟踪的窗口期,因此可连续取值的基于残差的自适应跟踪资源分配算法不适用于旋转相控阵雷达。在Cohen研究基础上,提出一种基于目标先验参数的变数据率跟踪方法法应用于旋转相控阵雷达目标跟踪,本发明基于目标的先验参数,包括该目标的最大机动加速度和最大航速,实时计算目标在当前距离上目标机动产生的最大跟踪残差,确保雷达的跟踪波束宽度对