
一种基于内窥镜的成像方法及成像系统.pdf

一只****呀淑


1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于内窥镜的成像方法及成像系统.pdf
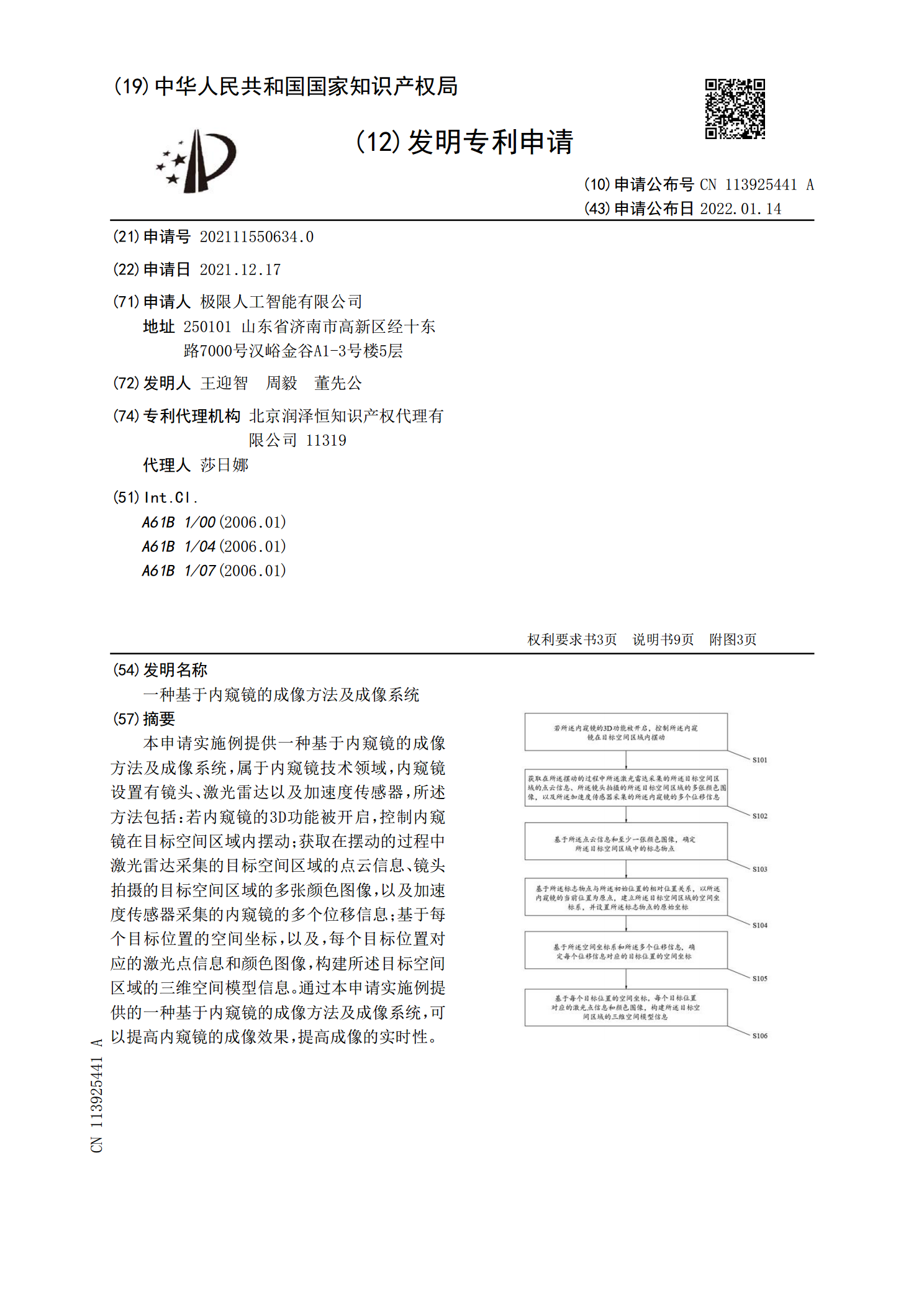
本申请实施例提供一种基于内窥镜的成像方法及成像系统,属于内窥镜技术领域,内窥镜设置有镜头、激光雷达以及加速度传感器,所述方法包括:若内窥镜的3D功能被开启,控制内窥镜在目标空间区域内摆动;获取在摆动的过程中激光雷达采集的目标空间区域的点云信息、镜头拍摄的目标空间区域的多张颜色图像,以及加速度传感器采集的内窥镜的多个位移信息;基于每个目标位置的空间坐标,以及,每个目标位置对应的激光点信息和颜色图像,构建所述目标空间区域的三维空间模型信息。通过本申请实施例提供的一种基于内窥镜的成像方法及成像系统,可以提高内窥
基于硬式内窥镜的多光谱荧光成像系统及成像方法.pdf
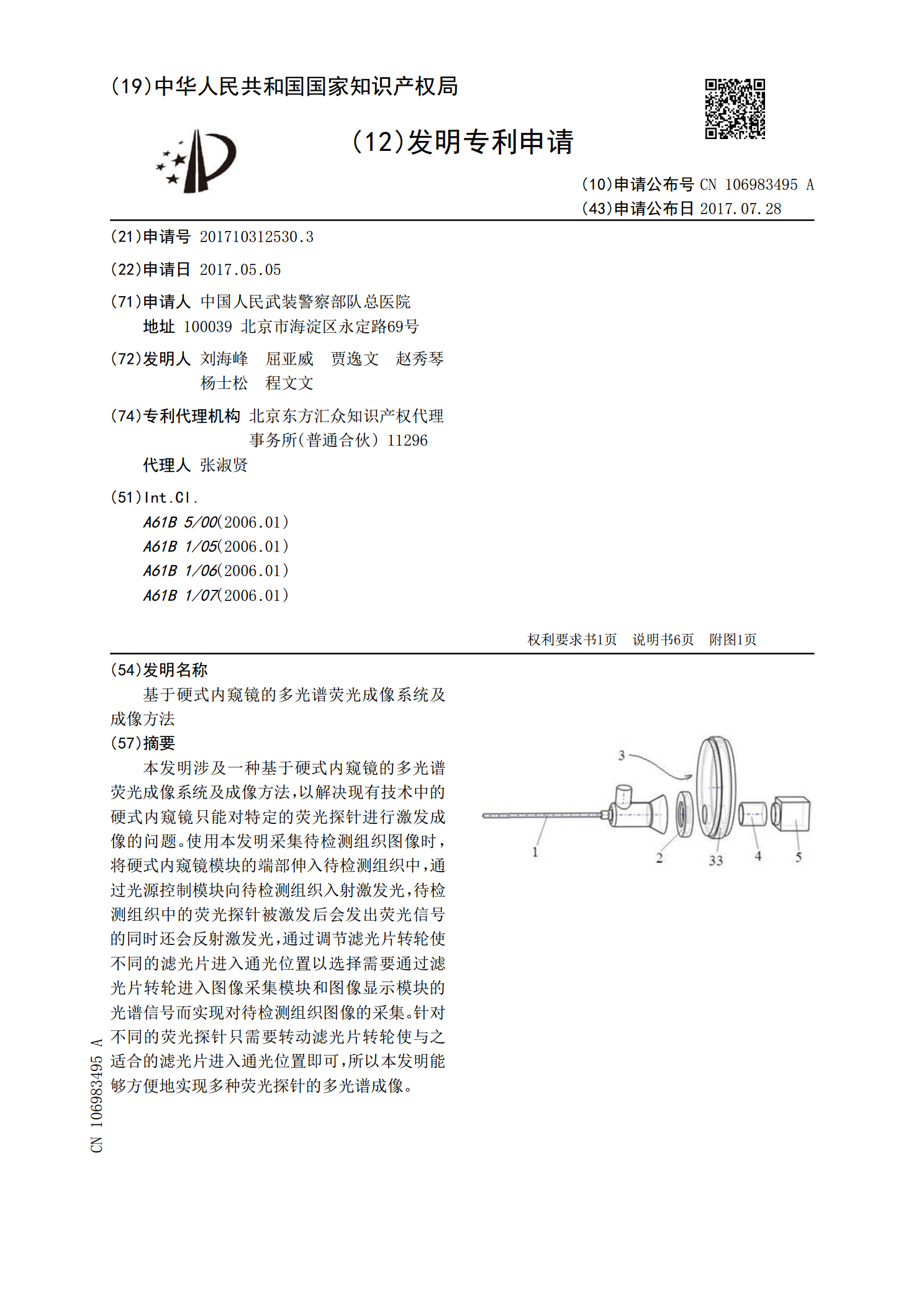
本发明涉及一种基于硬式内窥镜的多光谱荧光成像系统及成像方法,以解决现有技术中的硬式内窥镜只能对特定的荧光探针进行激发成像的问题。使用本发明采集待检测组织图像时,将硬式内窥镜模块的端部伸入待检测组织中,通过光源控制模块向待检测组织入射激发光,待检测组织中的荧光探针被激发后会发出荧光信号的同时还会反射激发光,通过调节滤光片转轮使不同的滤光片进入通光位置以选择需要通过滤光片转轮进入图像采集模块和图像显示模块的光谱信号而实现对待检测组织图像的采集。针对不同的荧光探针只需要转动滤光片转轮使与之适合的滤光片进入通光位
用于3D内窥镜成像系统的成像方法和3D内窥镜成像系统.pdf
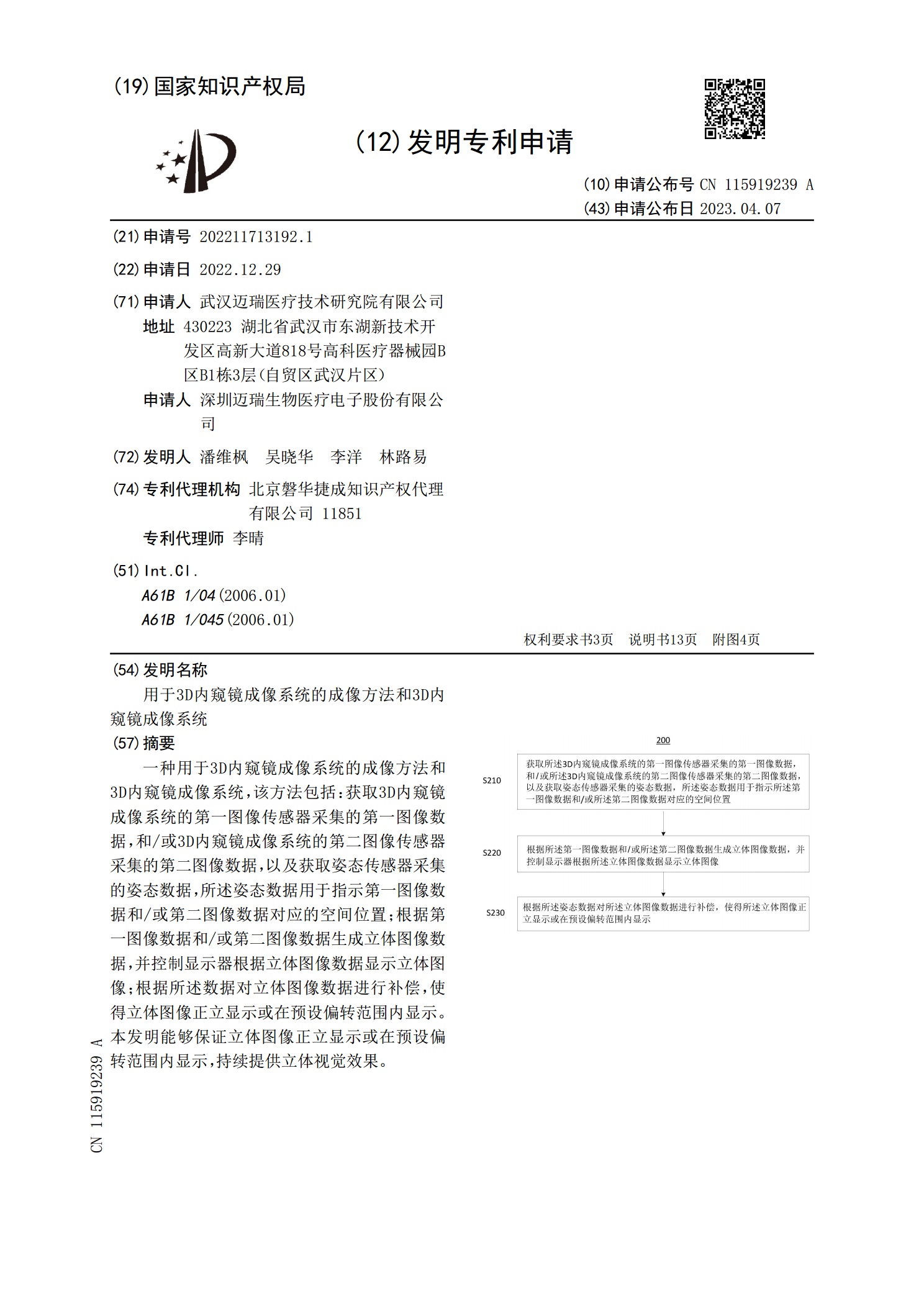
一种用于3D内窥镜成像系统的成像方法和3D内窥镜成像系统,该方法包括:获取3D内窥镜成像系统的第一图像传感器采集的第一图像数据,和/或3D内窥镜成像系统的第二图像传感器采集的第二图像数据,以及获取姿态传感器采集的姿态数据,所述姿态数据用于指示第一图像数据和/或第二图像数据对应的空间位置;根据第一图像数据和/或第二图像数据生成立体图像数据,并控制显示器根据立体图像数据显示立体图像;根据所述数据对立体图像数据进行补偿,使得立体图像正立显示或在预设偏转范围内显示。本发明能够保证立体图像正立显示或在预设偏转范围内
用于3D内窥镜成像系统的成像方法和3D内窥镜成像系统.pdf
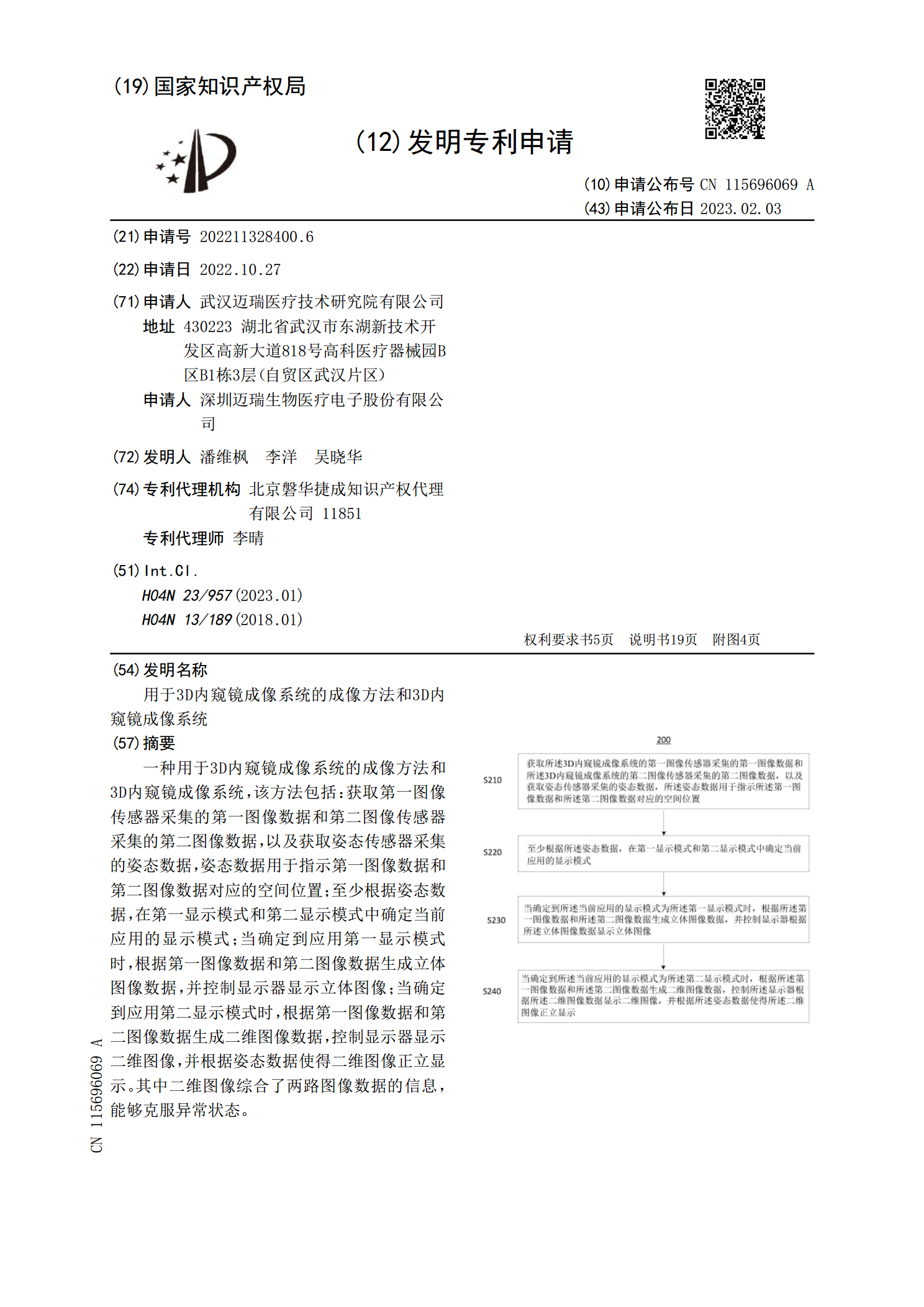
一种用于3D内窥镜成像系统的成像方法和3D内窥镜成像系统,该方法包括:获取第一图像传感器采集的第一图像数据和第二图像传感器采集的第二图像数据,以及获取姿态传感器采集的姿态数据,姿态数据用于指示第一图像数据和第二图像数据对应的空间位置;至少根据姿态数据,在第一显示模式和第二显示模式中确定当前应用的显示模式;当确定到应用第一显示模式时,根据第一图像数据和第二图像数据生成立体图像数据,并控制显示器显示立体图像;当确定到应用第二显示模式时,根据第一图像数据和第二图像数据生成二维图像数据,控制显示器显示二维图像,并
一种内窥镜系统及其成像方法.pdf
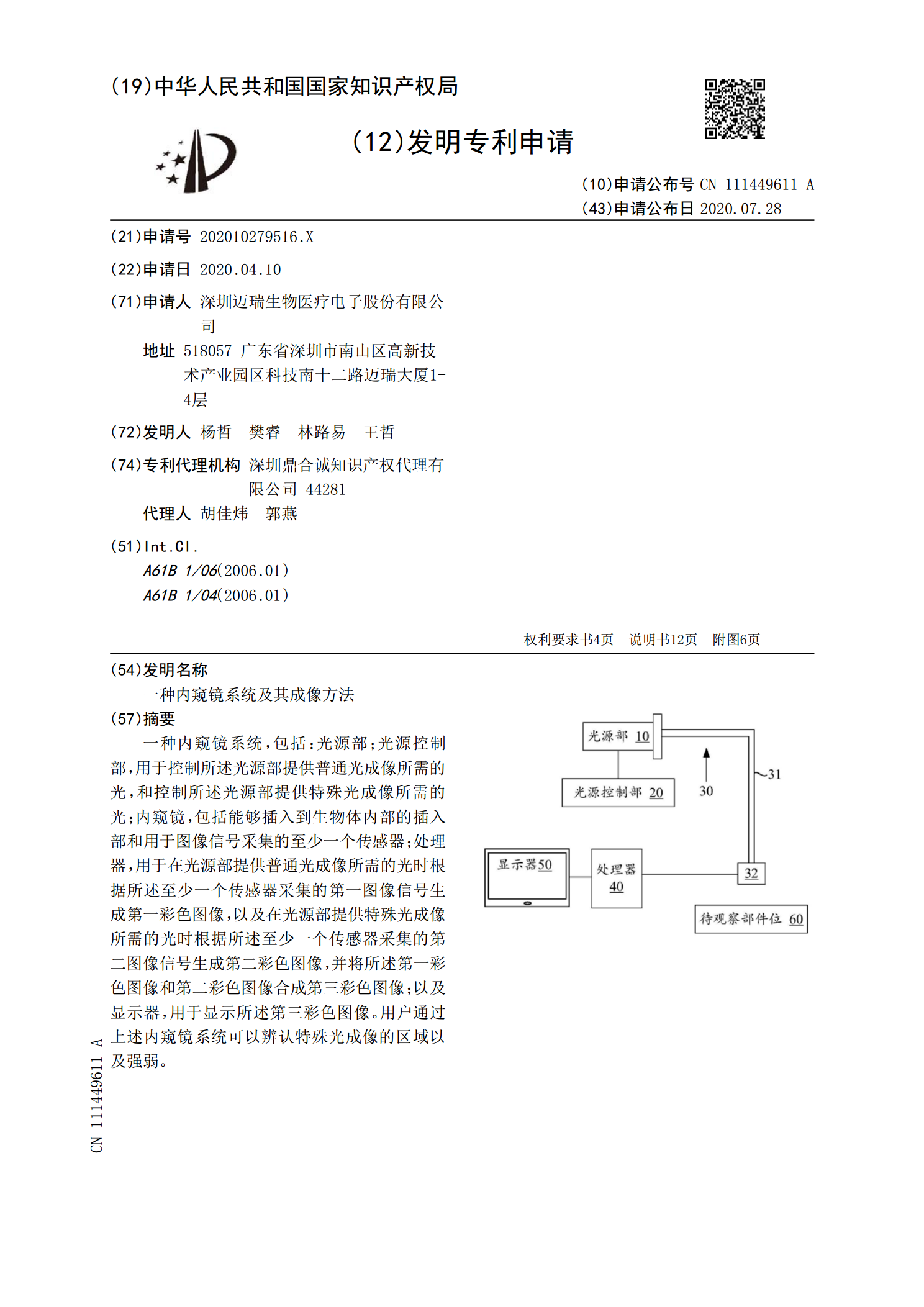
一种内窥镜系统,包括:光源部;光源控制部,用于控制所述光源部提供普通光成像所需的光,和控制所述光源部提供特殊光成像所需的光;内窥镜,包括能够插入到生物体内部的插入部和用于图像信号采集的至少一个传感器;处理器,用于在光源部提供普通光成像所需的光时根据所述至少一个传感器采集的第一图像信号生成第一彩色图像,以及在光源部提供特殊光成像所需的光时根据所述至少一个传感器采集的第二图像信号生成第二彩色图像,并将所述第一彩色图像和第二彩色图像合成第三彩色图像;以及显示器,用于显示所述第三彩色图像。用户通过上述内窥镜系统可