
用于3D内窥镜成像系统的成像方法和3D内窥镜成像系统.pdf

一吃****仪凡

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于3D内窥镜成像系统的成像方法和3D内窥镜成像系统.pdf
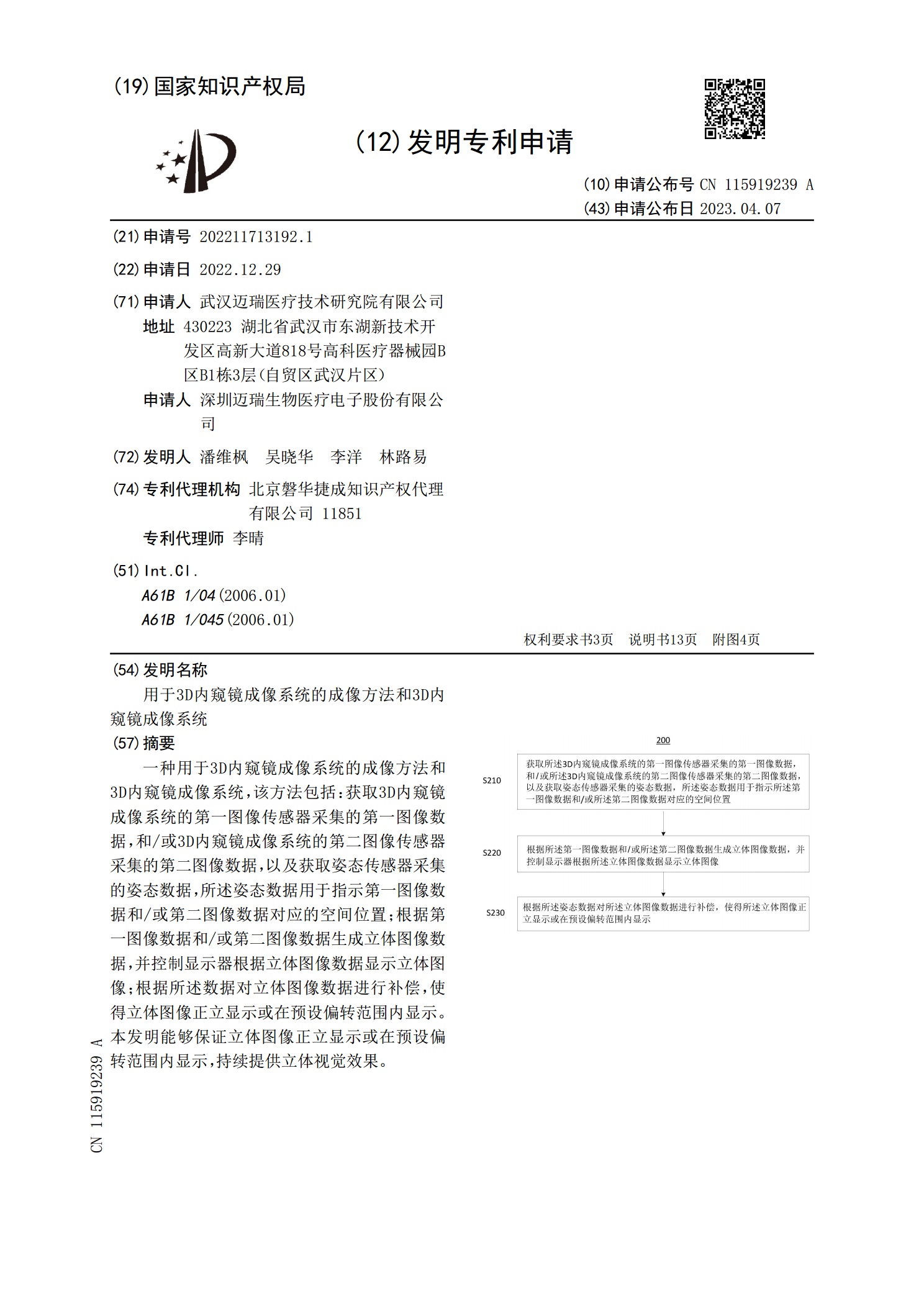
一种用于3D内窥镜成像系统的成像方法和3D内窥镜成像系统,该方法包括:获取3D内窥镜成像系统的第一图像传感器采集的第一图像数据,和/或3D内窥镜成像系统的第二图像传感器采集的第二图像数据,以及获取姿态传感器采集的姿态数据,所述姿态数据用于指示第一图像数据和/或第二图像数据对应的空间位置;根据第一图像数据和/或第二图像数据生成立体图像数据,并控制显示器根据立体图像数据显示立体图像;根据所述数据对立体图像数据进行补偿,使得立体图像正立显示或在预设偏转范围内显示。本发明能够保证立体图像正立显示或在预设偏转范围内
用于3D内窥镜成像系统的成像方法和3D内窥镜成像系统.pdf
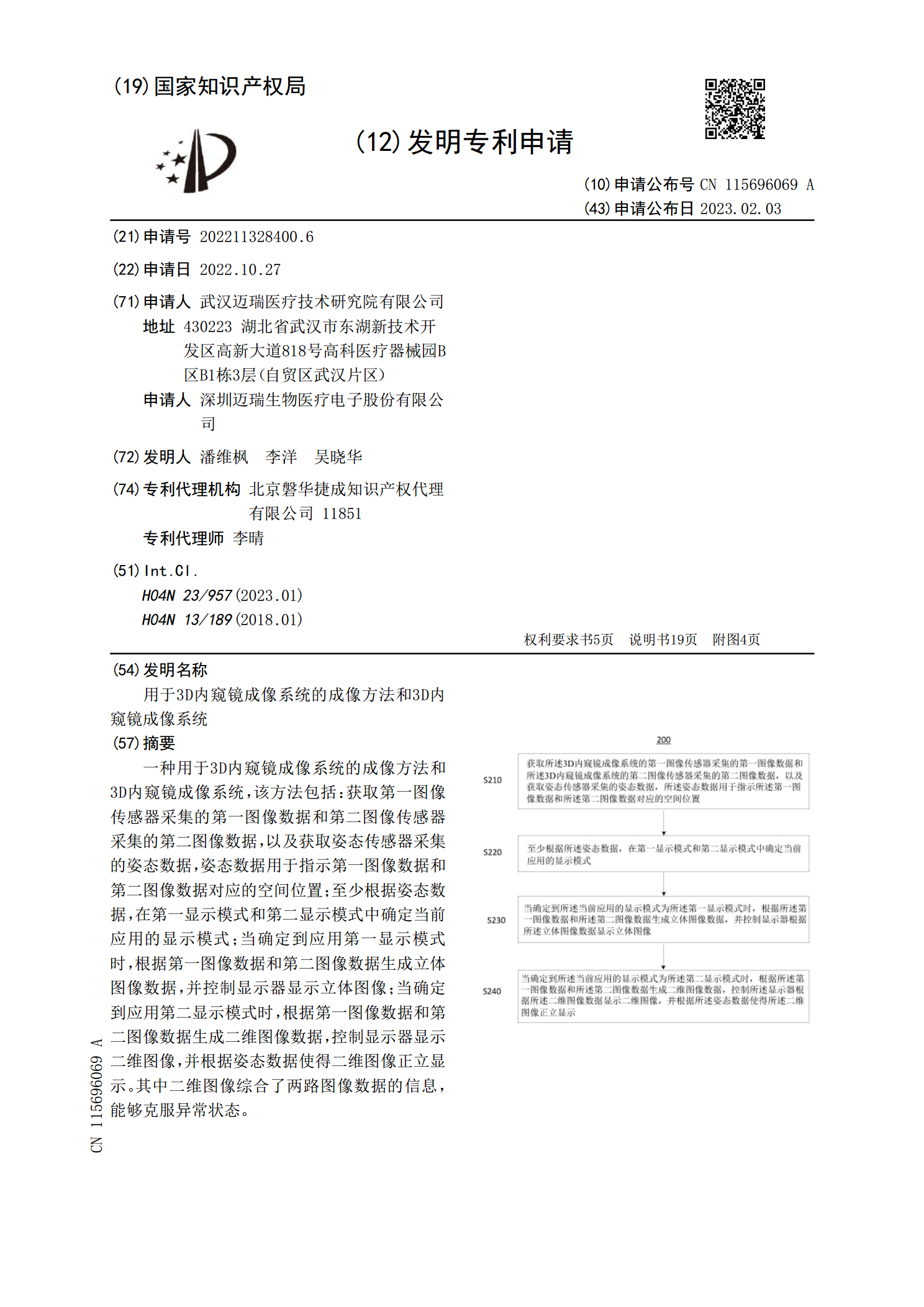
一种用于3D内窥镜成像系统的成像方法和3D内窥镜成像系统,该方法包括:获取第一图像传感器采集的第一图像数据和第二图像传感器采集的第二图像数据,以及获取姿态传感器采集的姿态数据,姿态数据用于指示第一图像数据和第二图像数据对应的空间位置;至少根据姿态数据,在第一显示模式和第二显示模式中确定当前应用的显示模式;当确定到应用第一显示模式时,根据第一图像数据和第二图像数据生成立体图像数据,并控制显示器显示立体图像;当确定到应用第二显示模式时,根据第一图像数据和第二图像数据生成二维图像数据,控制显示器显示二维图像,并

用于内窥镜系统的成像及显示方法和内窥镜系统.pdf
一种用于内窥镜系统的成像及显示方法和内窥镜系统,该方法包括:获取待观察部位的内窥镜图像信号;基于所述内窥镜图像信号生成第一内窥镜图像和第二内窥镜图像,所述第一内窥镜图像与所述第二内窥镜图像之间具有视差;基于所述第一内窥镜图像和所述第二内窥镜图像生成立体内窥镜图像;从与所述内窥镜系统通信连接的外部图像源获取外部图像,所述外部图像为二维图像;在显示界面的至少两个显示区域中分别显示所述立体内窥镜图像和所述外部图像。本发明同时显示立体内窥镜图像和外部图像,立体内窥镜图像能够提供更真实的视觉感受,外部图像能够提供更
用于内窥镜系统的成像及显示方法和内窥镜系统.pdf
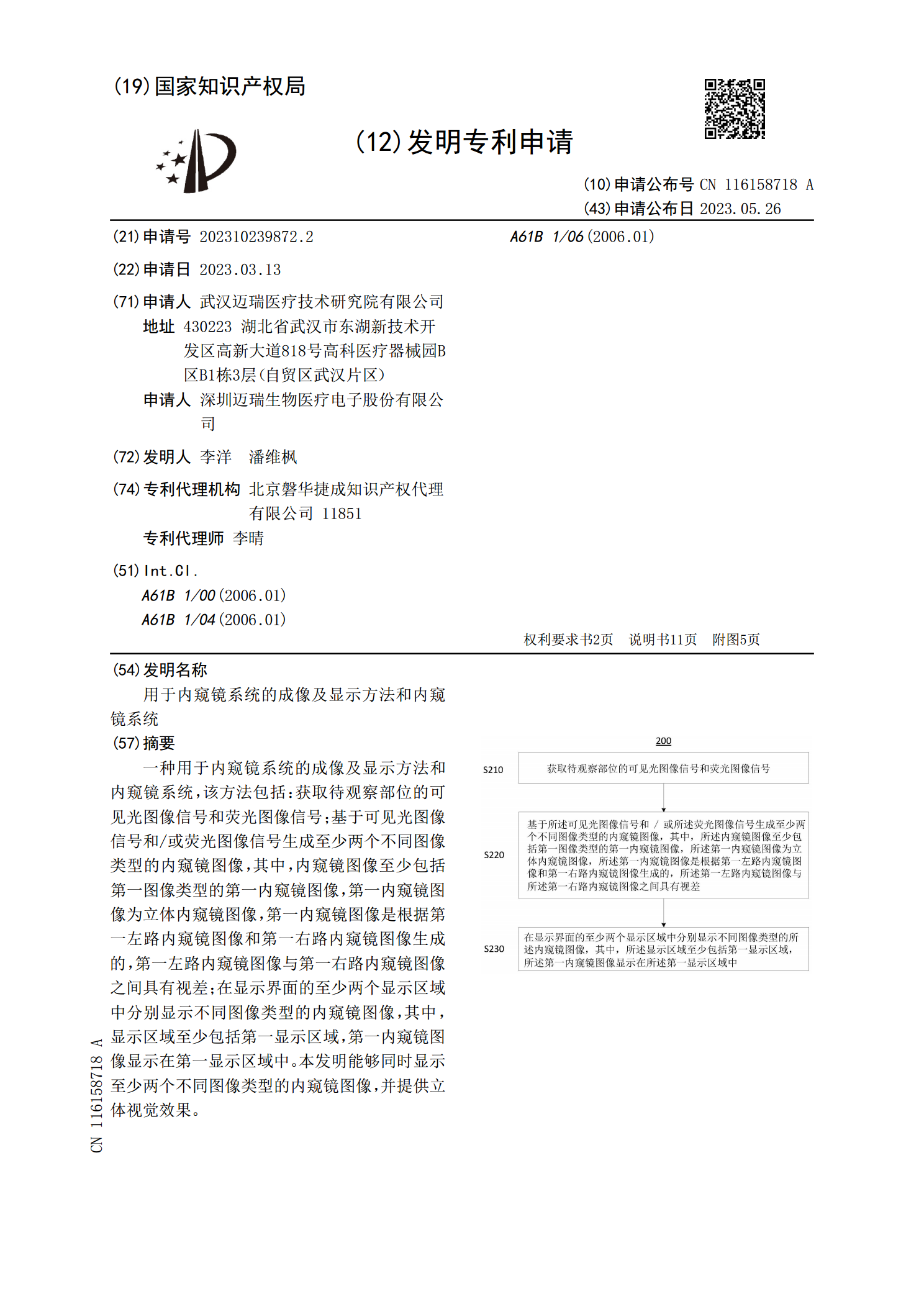
一种用于内窥镜系统的成像及显示方法和内窥镜系统,该方法包括:获取待观察部位的可见光图像信号和荧光图像信号;基于可见光图像信号和/或荧光图像信号生成至少两个不同图像类型的内窥镜图像,其中,内窥镜图像至少包括第一图像类型的第一内窥镜图像,第一内窥镜图像为立体内窥镜图像,第一内窥镜图像是根据第一左路内窥镜图像和第一右路内窥镜图像生成的,第一左路内窥镜图像与第一右路内窥镜图像之间具有视差;在显示界面的至少两个显示区域中分别显示不同图像类型的内窥镜图像,其中,显示区域至少包括第一显示区域,第一内窥镜图像显示在第一显
一种3D内窥镜的可调成像组件、3D内窥镜及成像系统.pdf
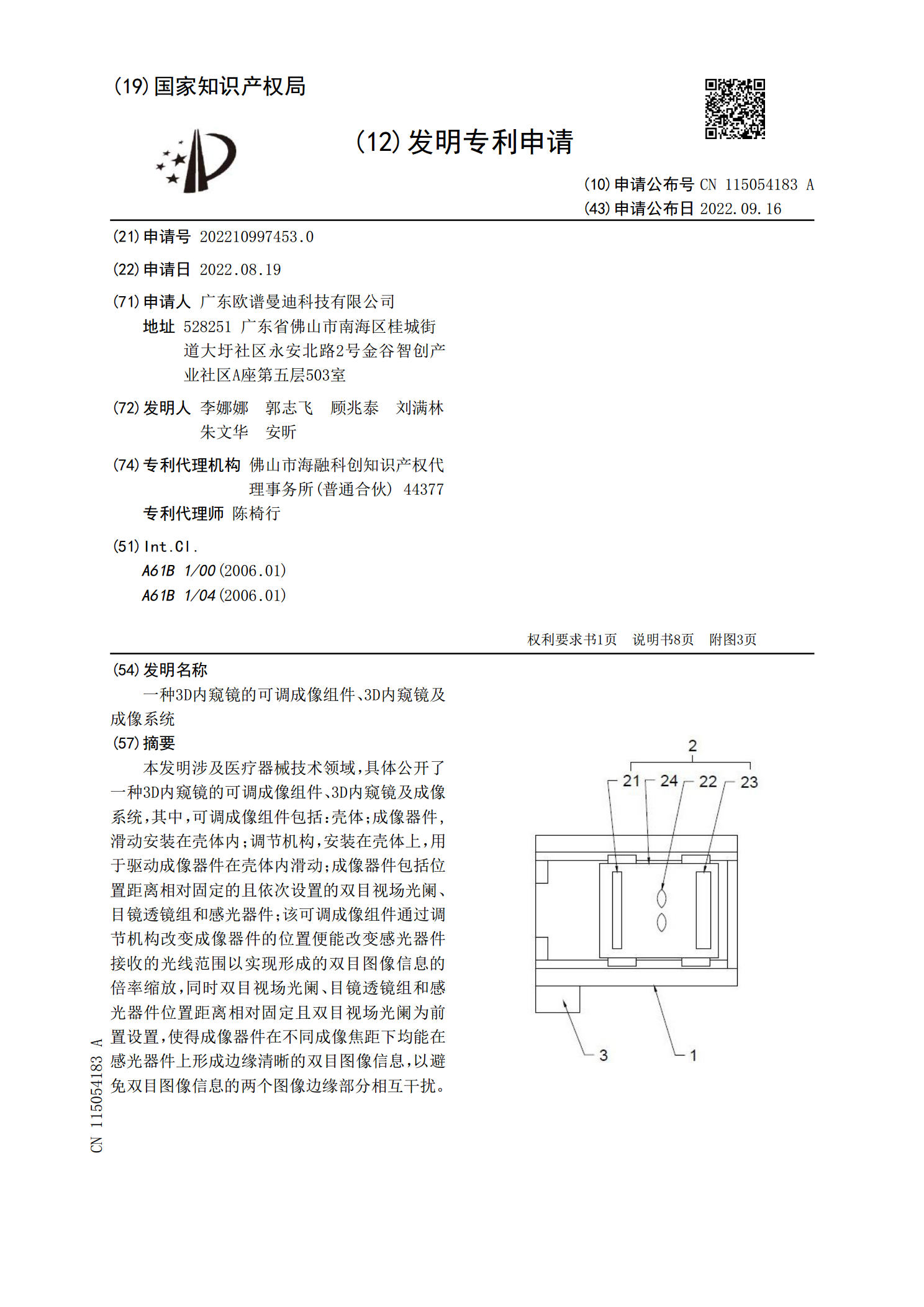
本发明涉及医疗器械技术领域,具体公开了一种3D内窥镜的可调成像组件、3D内窥镜及成像系统,其中,可调成像组件包括:壳体;成像器件,滑动安装在壳体内;调节机构,安装在壳体上,用于驱动成像器件在壳体内滑动;成像器件包括位置距离相对固定的且依次设置的双目视场光阑、目镜透镜组和感光器件;该可调成像组件通过调节机构改变成像器件的位置便能改变感光器件接收的光线范围以实现形成的双目图像信息的倍率缩放,同时双目视场光阑、目镜透镜组和感光器件位置距离相对固定且双目视场光阑为前置设置,使得成像器件在不同成像焦距下均能在感光器