
一种车辆自适应巡航算法.pdf

玉怡****文档

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种车辆自适应巡航算法.pdf
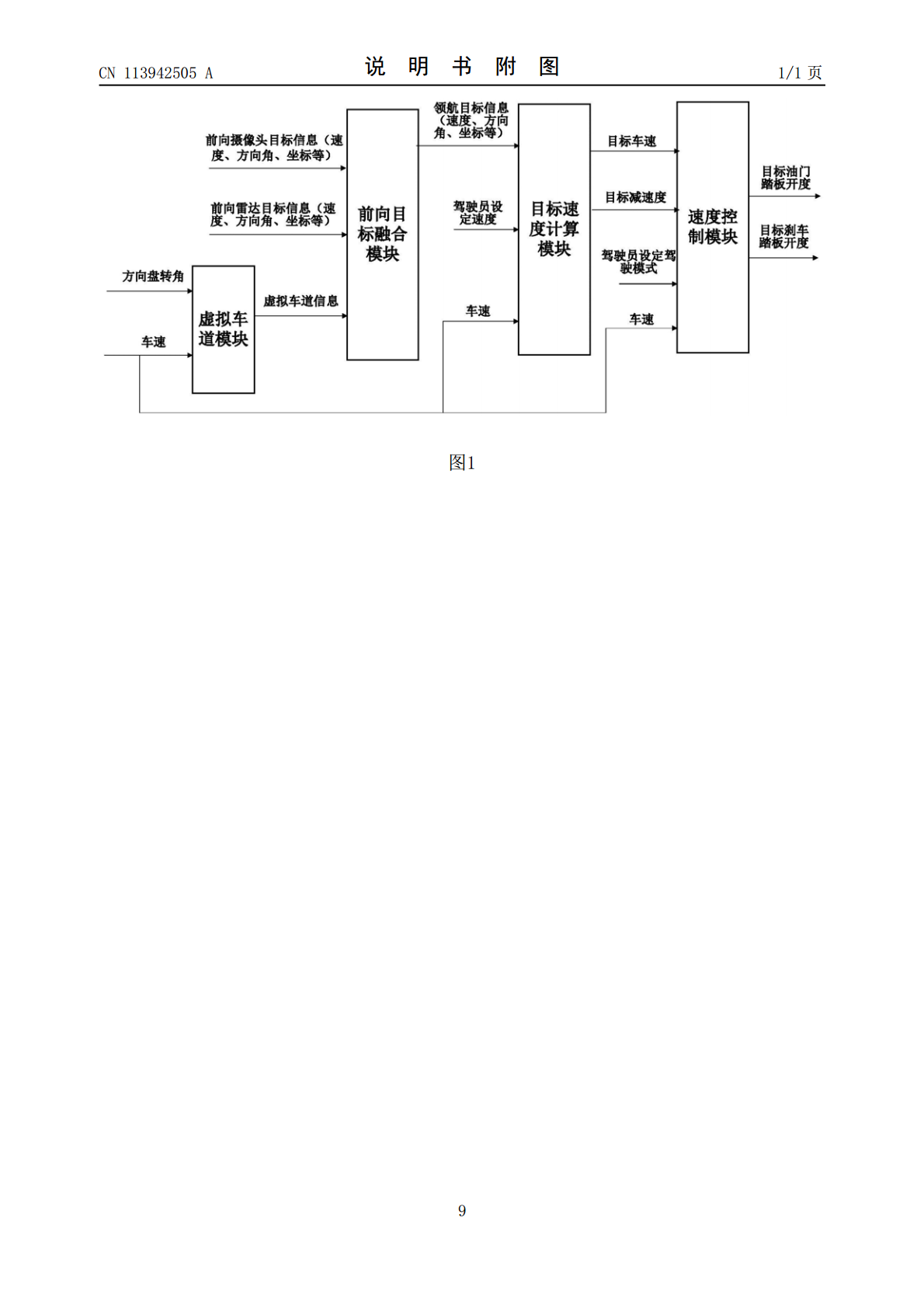
本发明属于车辆智能驾驶技术领域,涉及一种车辆自适应巡航算法。一种车辆自适应巡航算法由四部分组成,虚拟车道模块、前向目标融合模块、目标速度计算模块和速度控制模块。虚拟车道模块使用车速和方向盘转角预估虚拟车道;前向目标融合模块融合前向摄像头目标信息、前向雷达目标信息、虚拟车道信息输出领航目标信息;目标速度计算模块使用驾驶员设定速度、车速及领航目标信息计算目标车速及目标减速度;速度控制模块使用目标车速及目标减速度计算油门踏板开度及刹车踏板开度;本发明涉及的车辆自适应巡航功能其开启不受低速度限制,支持0‑130k
一种车辆的自适应巡航滑模控制方法.pdf
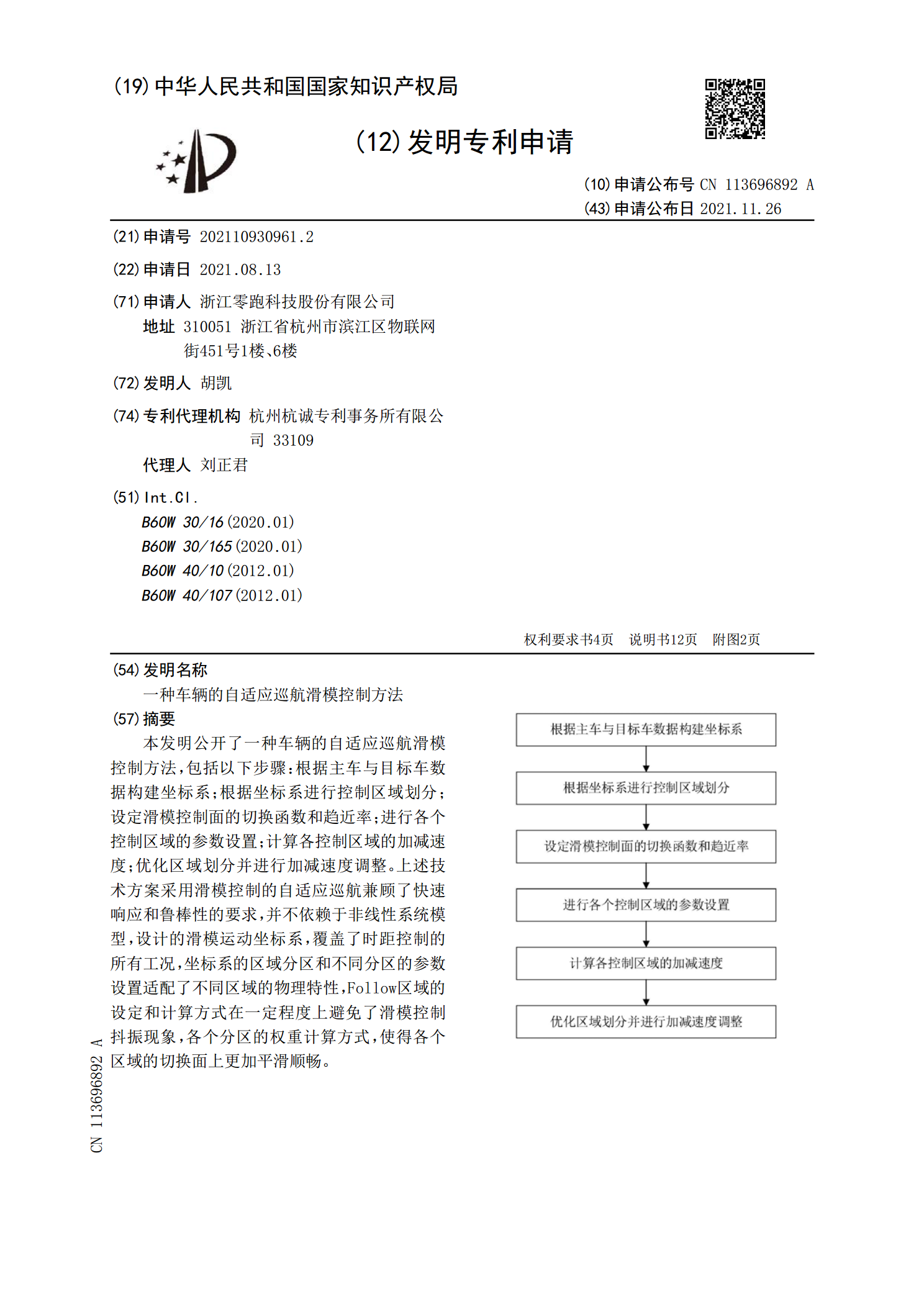
本发明公开了一种车辆的自适应巡航滑模控制方法,包括以下步骤:根据主车与目标车数据构建坐标系;根据坐标系进行控制区域划分;设定滑模控制面的切换函数和趋近率;进行各个控制区域的参数设置;计算各控制区域的加减速度;优化区域划分并进行加减速度调整。上述技术方案采用滑模控制的自适应巡航兼顾了快速响应和鲁棒性的要求,并不依赖于非线性系统模型,设计的滑模运动坐标系,覆盖了时距控制的所有工况,坐标系的区域分区和不同分区的参数设置适配了不同区域的物理特性,Follow区域的设定和计算方式在一定程度上避免了滑模控制抖振现象,
用于车辆的全速段自适应巡航控制.pdf
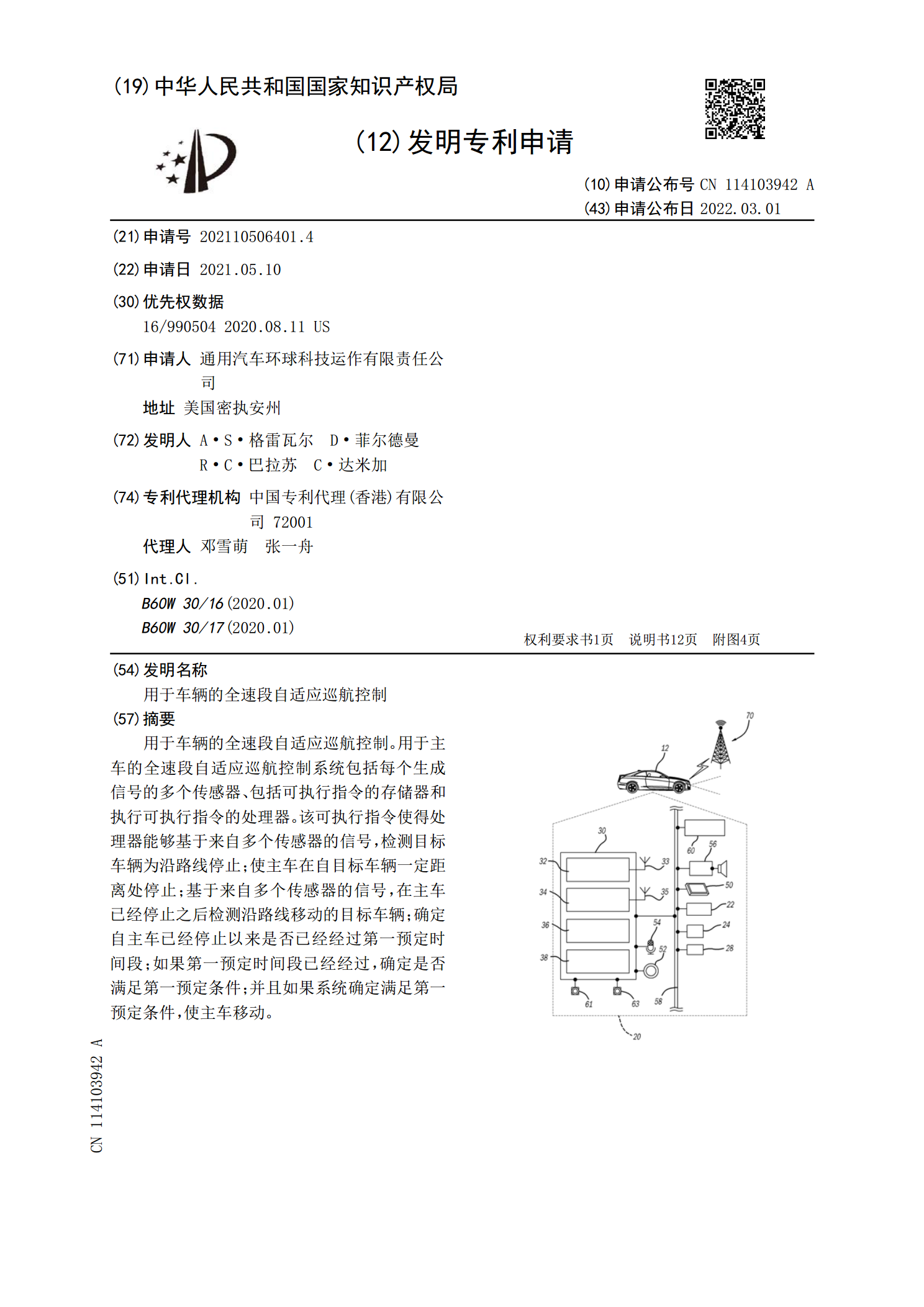
用于车辆的全速段自适应巡航控制。用于主车的全速段自适应巡航控制系统包括每个生成信号的多个传感器、包括可执行指令的存储器和执行可执行指令的处理器。该可执行指令使得处理器能够基于来自多个传感器的信号,检测目标车辆为沿路线停止;使主车在自目标车辆一定距离处停止;基于来自多个传感器的信号,在主车已经停止之后检测沿路线移动的目标车辆;确定自主车已经停止以来是否已经经过第一预定时间段;如果第一预定时间段已经经过,确定是否满足第一预定条件;并且如果系统确定满足第一预定条件,使主车移动。
自适应巡航控制方法、装置和车辆.pdf
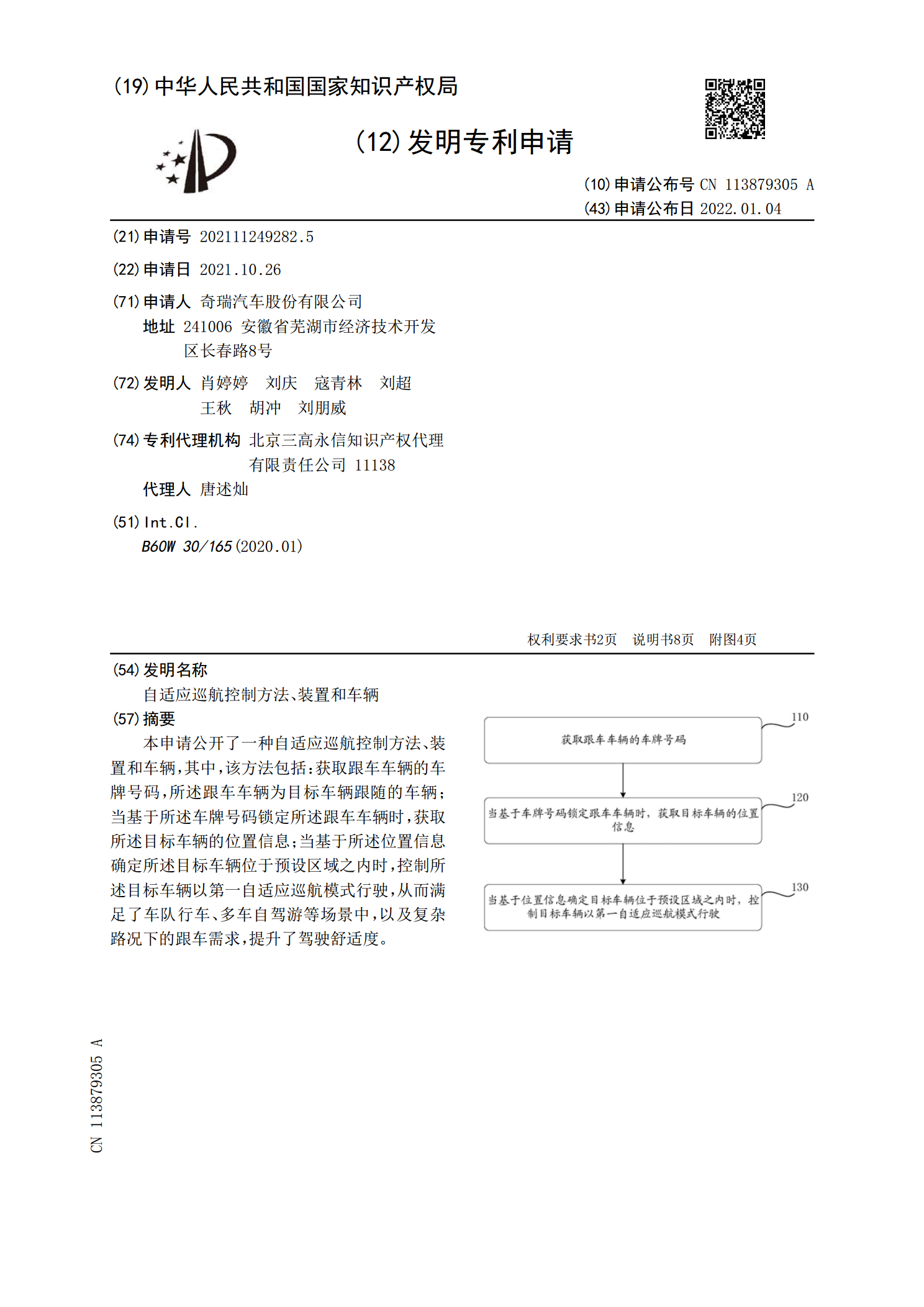
本申请公开了一种自适应巡航控制方法、装置和车辆,其中,该方法包括:获取跟车车辆的车牌号码,所述跟车车辆为目标车辆跟随的车辆;当基于所述车牌号码锁定所述跟车车辆时,获取所述目标车辆的位置信息;当基于所述位置信息确定所述目标车辆位于预设区域之内时,控制所述目标车辆以第一自适应巡航模式行驶,从而满足了车队行车、多车自驾游等场景中,以及复杂路况下的跟车需求,提升了驾驶舒适度。
一种车辆自适应巡航系统驾乘性能测评方法.pdf
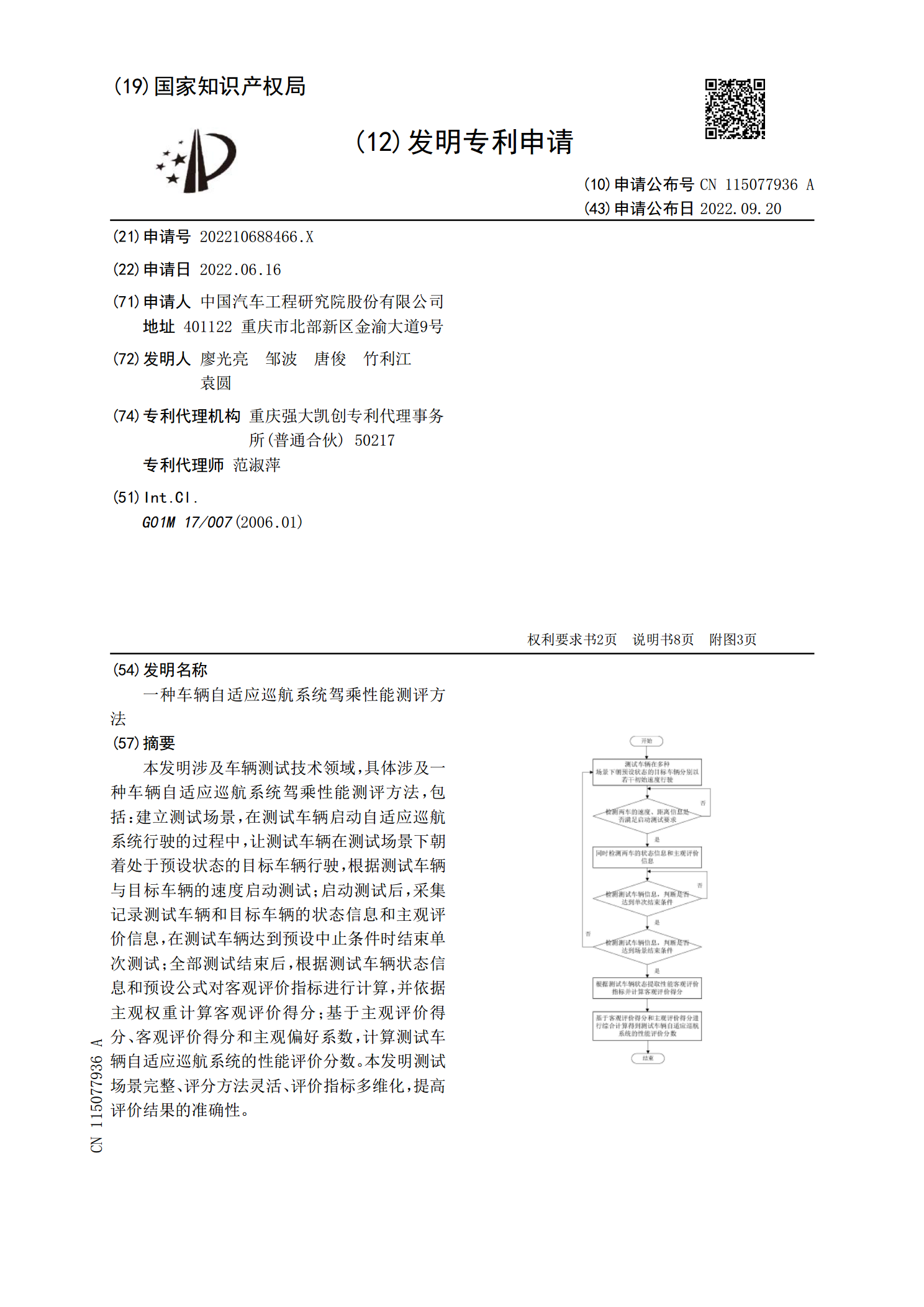
本发明涉及车辆测试技术领域,具体涉及一种车辆自适应巡航系统驾乘性能测评方法,包括:建立测试场景,在测试车辆启动自适应巡航系统行驶的过程中,让测试车辆在测试场景下朝着处于预设状态的目标车辆行驶,根据测试车辆与目标车辆的速度启动测试;启动测试后,采集记录测试车辆和目标车辆的状态信息和主观评价信息,在测试车辆达到预设中止条件时结束单次测试;全部测试结束后,根据测试车辆状态信息和预设公式对客观评价指标进行计算,并依据主观权重计算客观评价得分;基于主观评价得分、客观评价得分和主观偏好系数,计算测试车辆自适应巡航系统