
一种车辆自适应巡航系统驾乘性能测评方法.pdf

长春****主a

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆自适应巡航系统驾乘性能测评方法.pdf
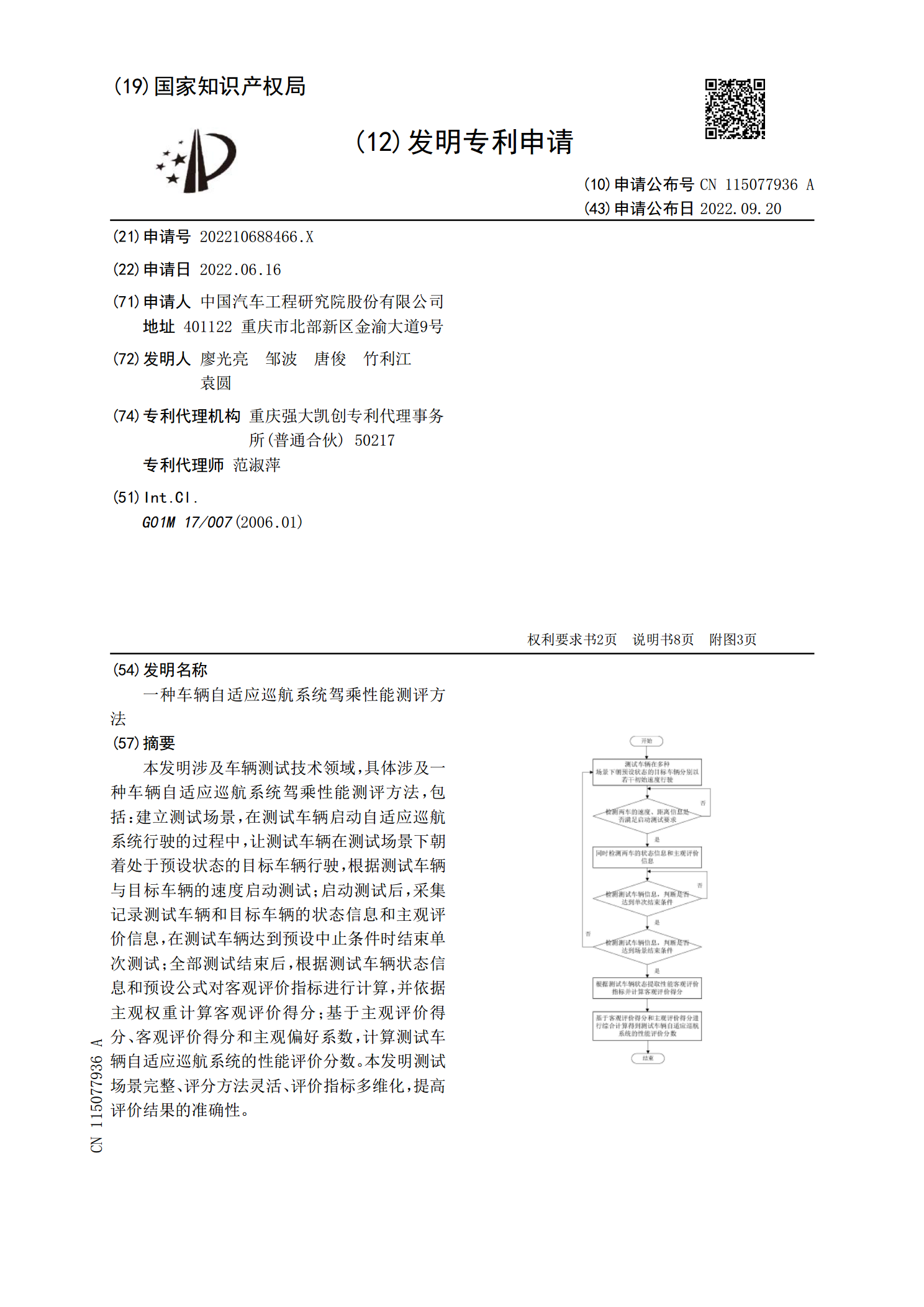
本发明涉及车辆测试技术领域,具体涉及一种车辆自适应巡航系统驾乘性能测评方法,包括:建立测试场景,在测试车辆启动自适应巡航系统行驶的过程中,让测试车辆在测试场景下朝着处于预设状态的目标车辆行驶,根据测试车辆与目标车辆的速度启动测试;启动测试后,采集记录测试车辆和目标车辆的状态信息和主观评价信息,在测试车辆达到预设中止条件时结束单次测试;全部测试结束后,根据测试车辆状态信息和预设公式对客观评价指标进行计算,并依据主观权重计算客观评价得分;基于主观评价得分、客观评价得分和主观偏好系数,计算测试车辆自适应巡航系统
自适应巡航控制系统、方法及车辆.pdf
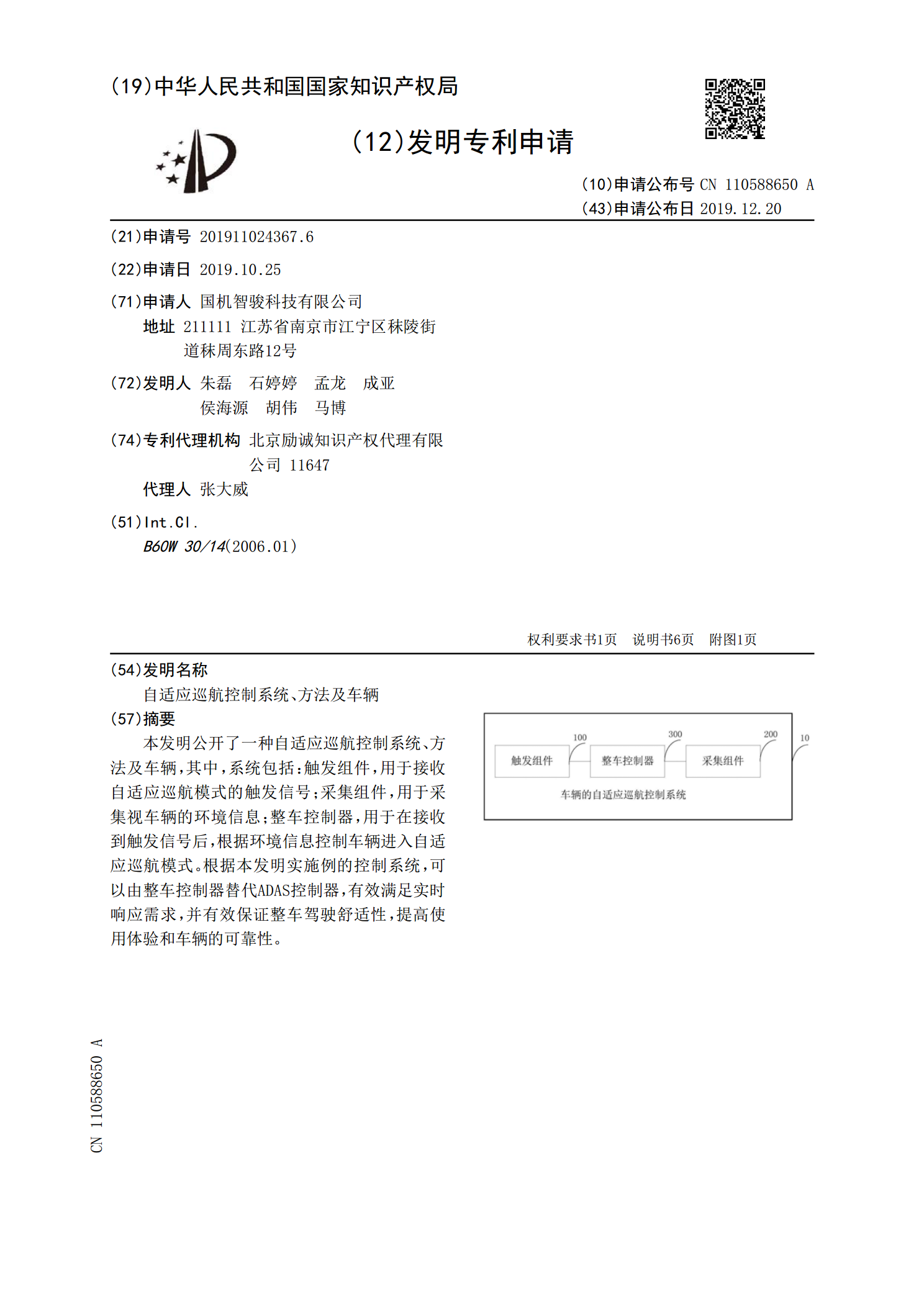
本发明公开了一种自适应巡航控制系统、方法及车辆,其中,系统包括:触发组件,用于接收自适应巡航模式的触发信号;采集组件,用于采集视车辆的环境信息;整车控制器,用于在接收到触发信号后,根据环境信息控制车辆进入自适应巡航模式。根据本发明实施例的控制系统,可以由整车控制器替代ADAS控制器,有效满足实时响应需求,并有效保证整车驾驶舒适性,提高使用体验和车辆的可靠性。
一种机动车辆自适应巡航系统的车速估计方法.pdf
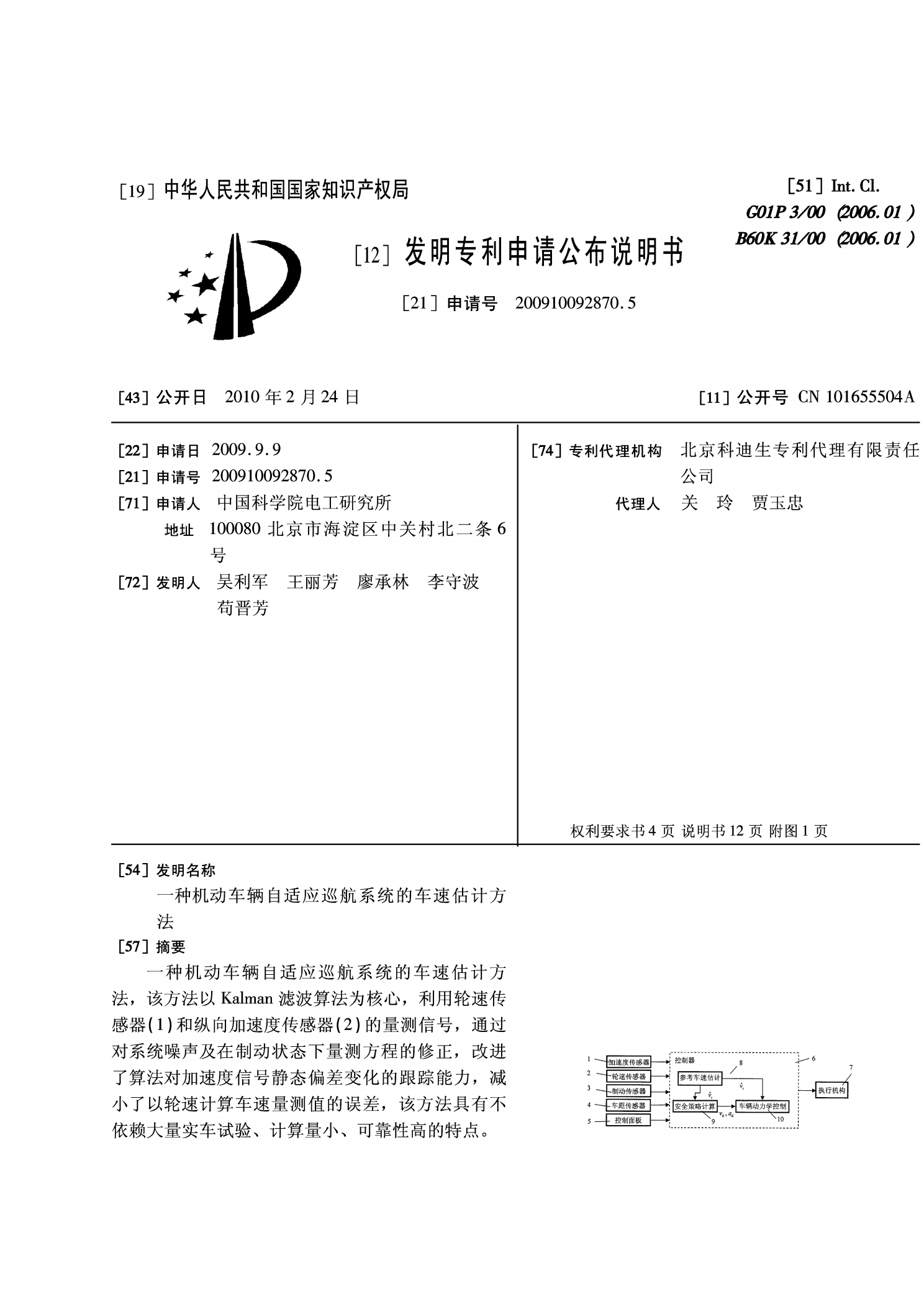
一种机动车辆自适应巡航系统的车速估计方法,该方法以Kalman滤波算法为核心,利用轮速传感器(1)和纵向加速度传感器(2)的量测信号,通过对系统噪声及在制动状态下量测方程的修正,改进了算法对加速度信号静态偏差变化的跟踪能力,减小了以轮速计算车速量测值的误差,该方法具有不依赖大量实车试验、计算量小、可靠性高的特点。
一种车辆的自适应巡航滑模控制方法.pdf
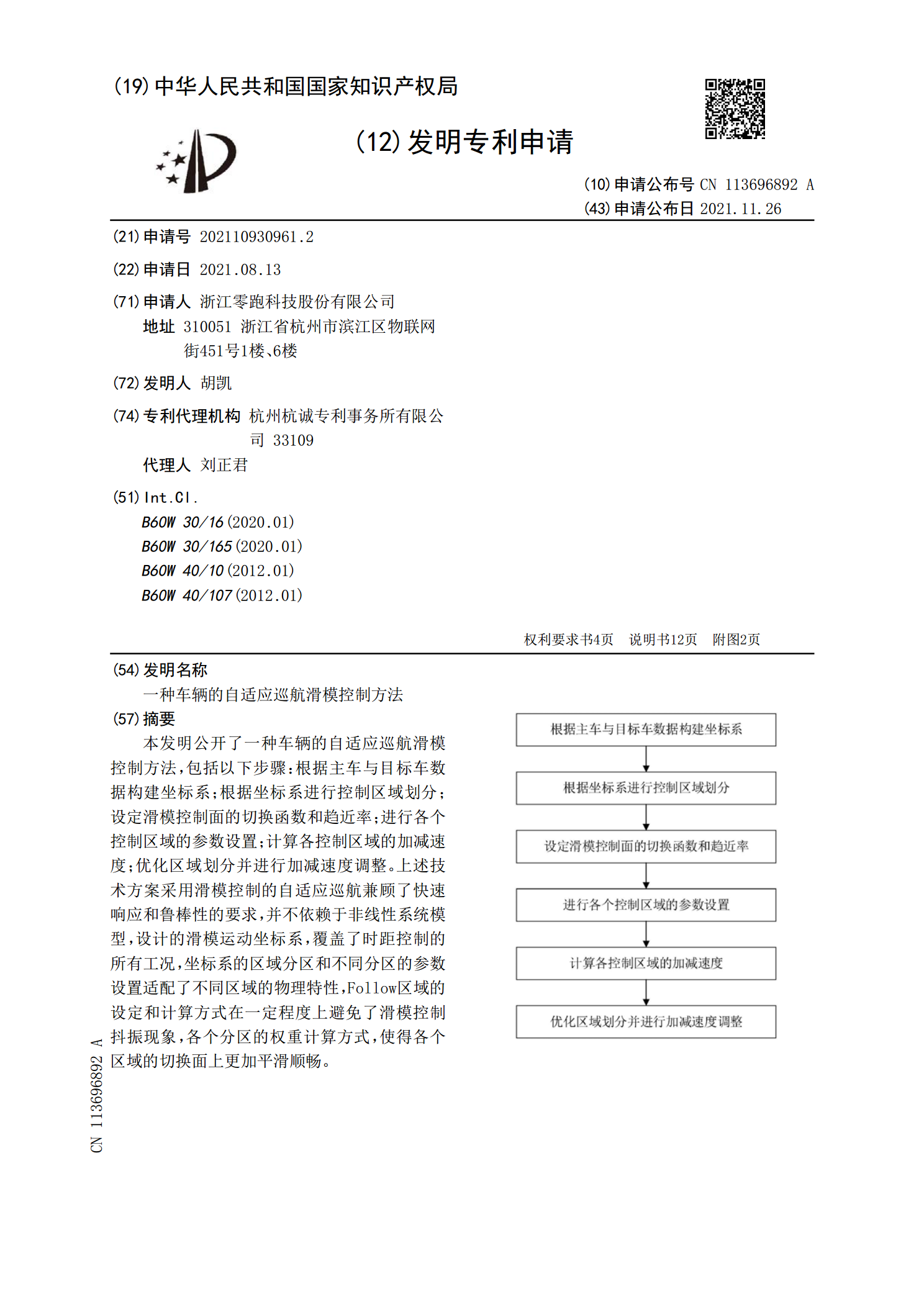
本发明公开了一种车辆的自适应巡航滑模控制方法,包括以下步骤:根据主车与目标车数据构建坐标系;根据坐标系进行控制区域划分;设定滑模控制面的切换函数和趋近率;进行各个控制区域的参数设置;计算各控制区域的加减速度;优化区域划分并进行加减速度调整。上述技术方案采用滑模控制的自适应巡航兼顾了快速响应和鲁棒性的要求,并不依赖于非线性系统模型,设计的滑模运动坐标系,覆盖了时距控制的所有工况,坐标系的区域分区和不同分区的参数设置适配了不同区域的物理特性,Follow区域的设定和计算方式在一定程度上避免了滑模控制抖振现象,
一种车辆自适应巡航算法.pdf
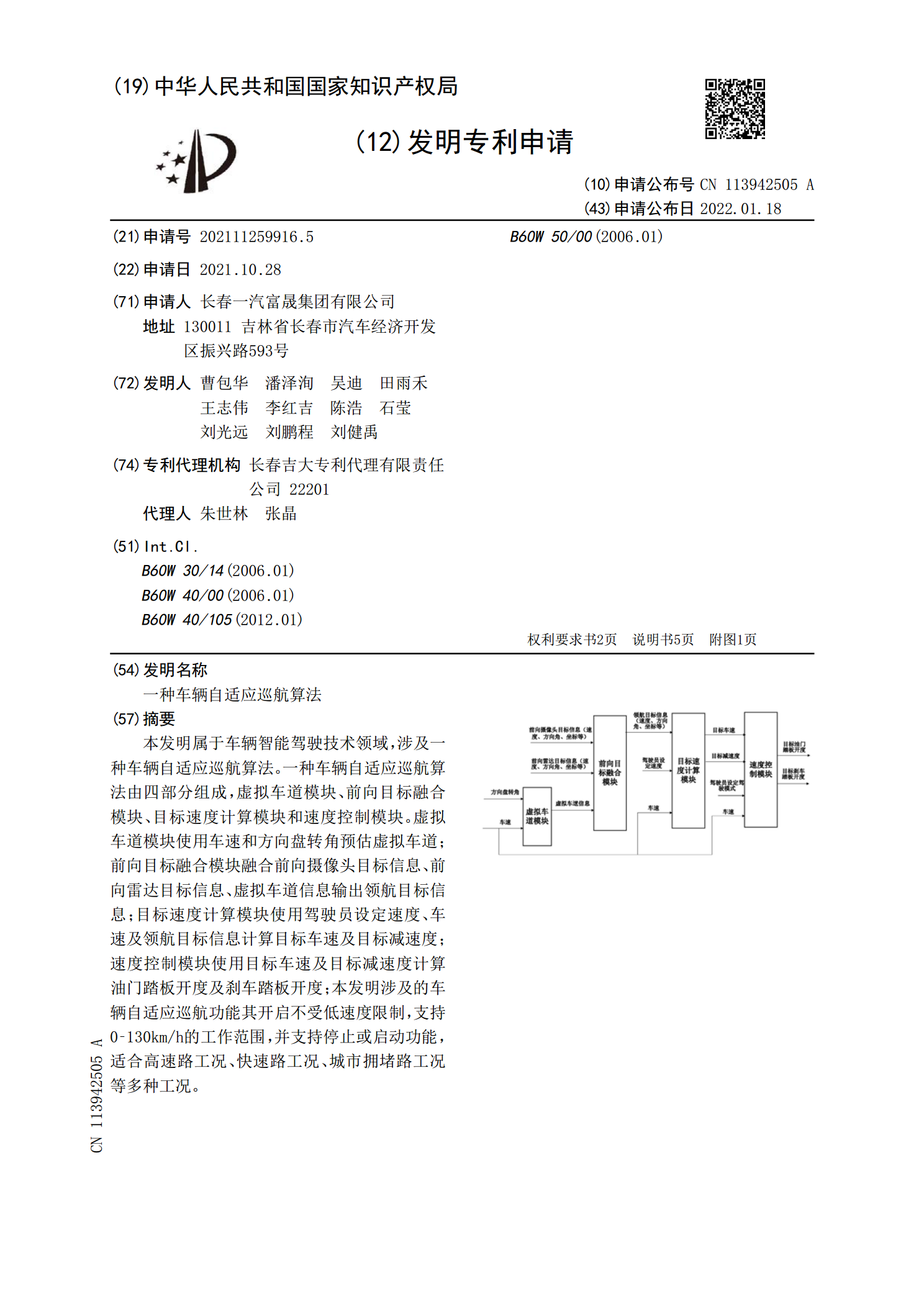
本发明属于车辆智能驾驶技术领域,涉及一种车辆自适应巡航算法。一种车辆自适应巡航算法由四部分组成,虚拟车道模块、前向目标融合模块、目标速度计算模块和速度控制模块。虚拟车道模块使用车速和方向盘转角预估虚拟车道;前向目标融合模块融合前向摄像头目标信息、前向雷达目标信息、虚拟车道信息输出领航目标信息;目标速度计算模块使用驾驶员设定速度、车速及领航目标信息计算目标车速及目标减速度;速度控制模块使用目标车速及目标减速度计算油门踏板开度及刹车踏板开度;本发明涉及的车辆自适应巡航功能其开启不受低速度限制,支持0‑130k