
用于车辆的全速段自适应巡航控制.pdf

努力****采萍

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于车辆的全速段自适应巡航控制.pdf
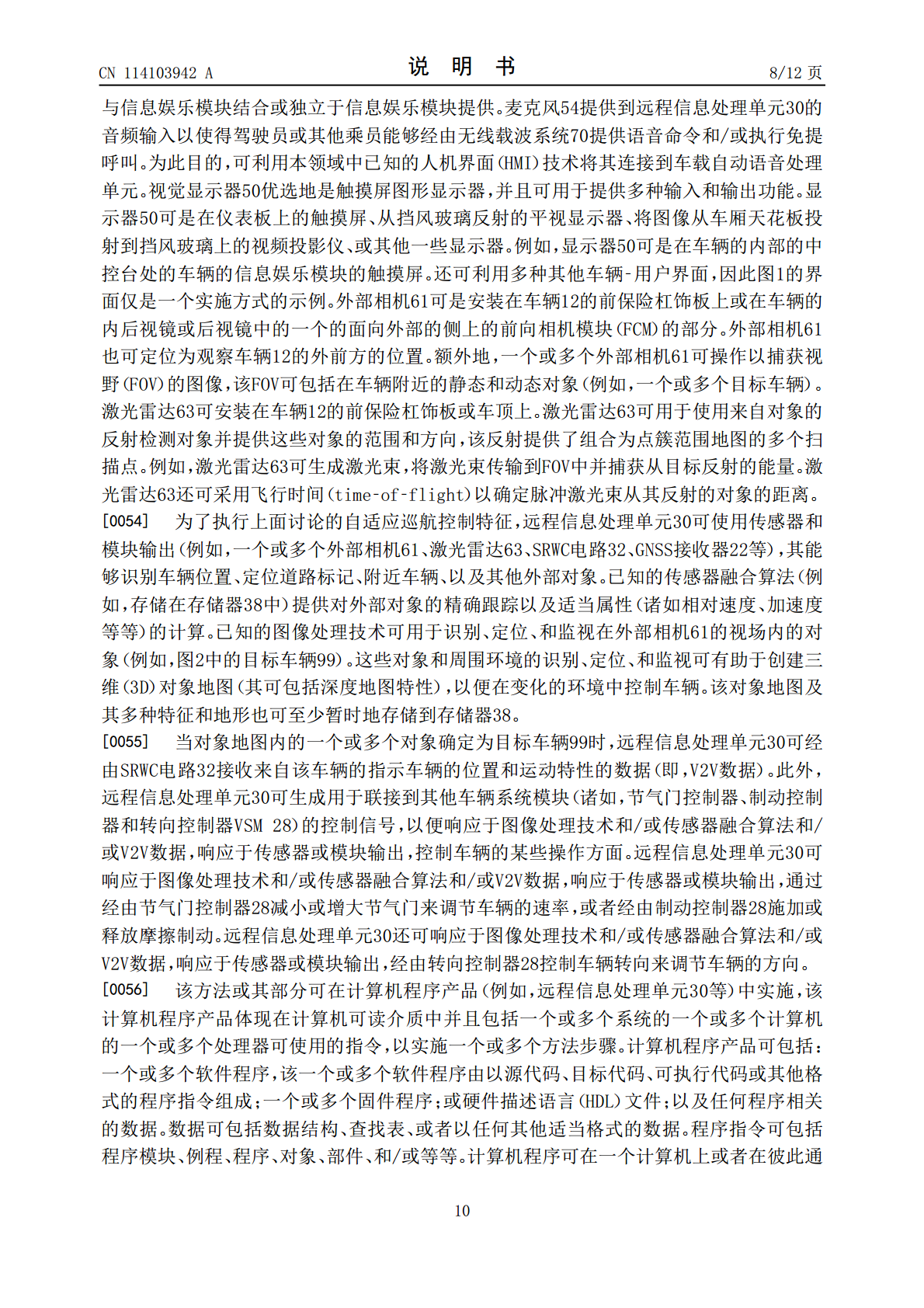
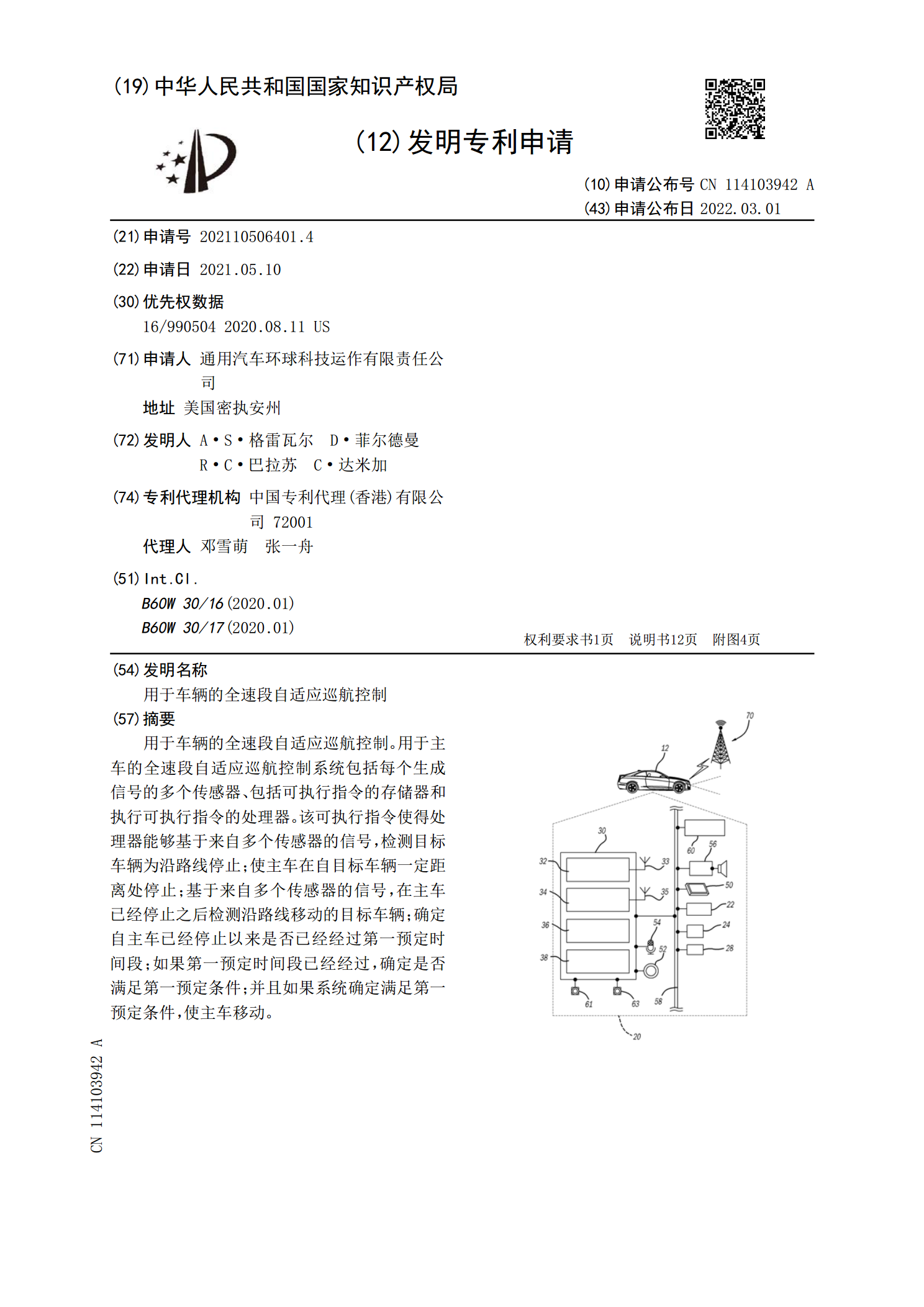
用于车辆的全速段自适应巡航控制。用于主车的全速段自适应巡航控制系统包括每个生成信号的多个传感器、包括可执行指令的存储器和执行可执行指令的处理器。该可执行指令使得处理器能够基于来自多个传感器的信号,检测目标车辆为沿路线停止;使主车在自目标车辆一定距离处停止;基于来自多个传感器的信号,在主车已经停止之后检测沿路线移动的目标车辆;确定自主车已经停止以来是否已经经过第一预定时间段;如果第一预定时间段已经经过,确定是否满足第一预定条件;并且如果系统确定满足第一预定条件,使主车移动。

纯电动汽车全速自适应巡航控制系统的研究.doc
纯电动汽车全速自适应巡航控制系统的研究随着节能环保的提倡和智能化热潮的兴起,电动汽车先进驾驶员辅助系统的开发越来越被重视。目前,电动汽车自适应巡航工作车速受到限制,跟踪性和抗干扰能力差,不能完全适应复杂多变的行驶环境。因此研究自适应巡航控制系统在全速和外界干扰工况下的响应具有重要意义。本文研究了纯电动汽车自适应巡航控制系统不同工作模式的切换和执行策略,采用了基于二次型优化和模型预测控制理论的纵向控制方法,针对不同驾驶工况进行仿真分析,验证了自适应巡航控制策略和算法的有效性。本文选取车辆的纵向车速作为被控对

纯电动汽车全速自适应巡航控制系统的研究.doc
纯电动汽车全速自适应巡航控制系统的研究随着节能环保的提倡和智能化热潮的兴起,电动汽车先进驾驶员辅助系统的开发越来越被重视。目前,电动汽车自适应巡航工作车速受到限制,跟踪性和抗干扰能力差,不能完全适应复杂多变的行驶环境。因此研究自适应巡航控制系统在全速和外界干扰工况下的响应具有重要意义。本文研究了纯电动汽车自适应巡航控制系统不同工作模式的切换和执行策略,采用了基于二次型优化和模型预测控制理论的纵向控制方法,针对不同驾驶工况进行仿真分析,验证了自适应巡航控制策略和算法的有效性。本文选取车辆的纵向车速作为被控对
自适应巡航控制系统、方法及车辆.pdf
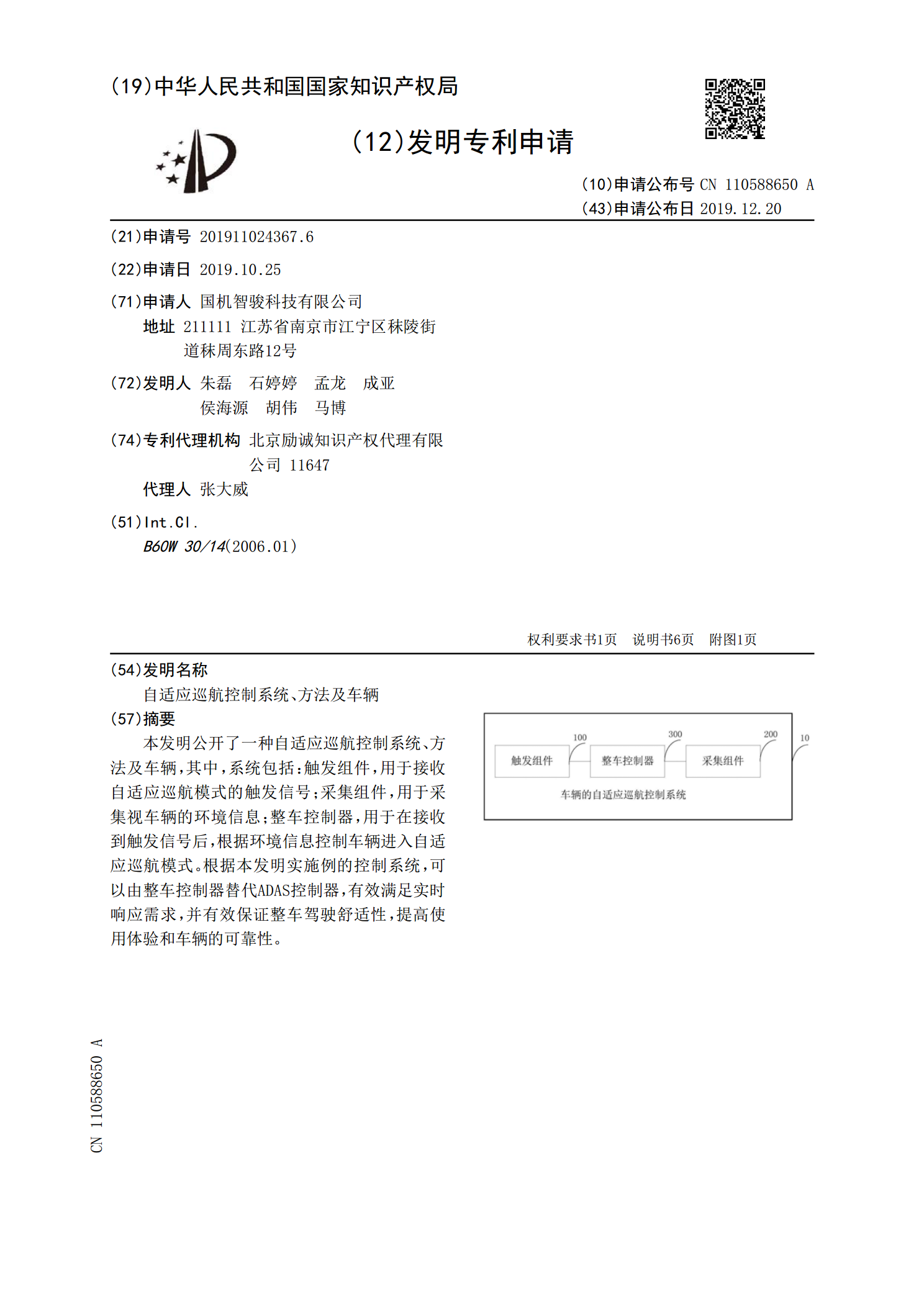
本发明公开了一种自适应巡航控制系统、方法及车辆,其中,系统包括:触发组件,用于接收自适应巡航模式的触发信号;采集组件,用于采集视车辆的环境信息;整车控制器,用于在接收到触发信号后,根据环境信息控制车辆进入自适应巡航模式。根据本发明实施例的控制系统,可以由整车控制器替代ADAS控制器,有效满足实时响应需求,并有效保证整车驾驶舒适性,提高使用体验和车辆的可靠性。
车辆自适应巡航控制策略研究与仿真.pptx
汇报人:/目录0102车辆自适应巡航控制概述控制策略设计控制算法实现算法性能评估03仿真平台选择仿真模型建立仿真参数设置仿真结果验证04不同控制策略下的仿真结果对比控制算法性能优化方向仿真结果在实际中的应用前景未来研究方向展望汇报人: