
车辆及其控制方法和控制装置.pdf

飞舟****文章


1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆及其控制方法和控制装置.pdf
本发明提出一种车辆的控制方法和控制装置,所述方法包括:获取坡度信息和车重;在根据坡度信息确定坡度大于坡度阈值的情况下,根据坡度信息和车重确定平衡扭矩;根据坡度信息确定对应的标定扭矩;将平衡扭矩与标定扭矩叠加,以得到目标扭矩;将目标扭矩发送至电机控制器,以使电机控制器控制电机输出目标扭矩。本发明实施例的车辆的控制方法,能够解决车辆在坡道蠕行时可能出现的溜坡、飞车等安全隐患,提高驾驶安全性和驾驶感受。
车辆及其控制方法和控制装置.pdf
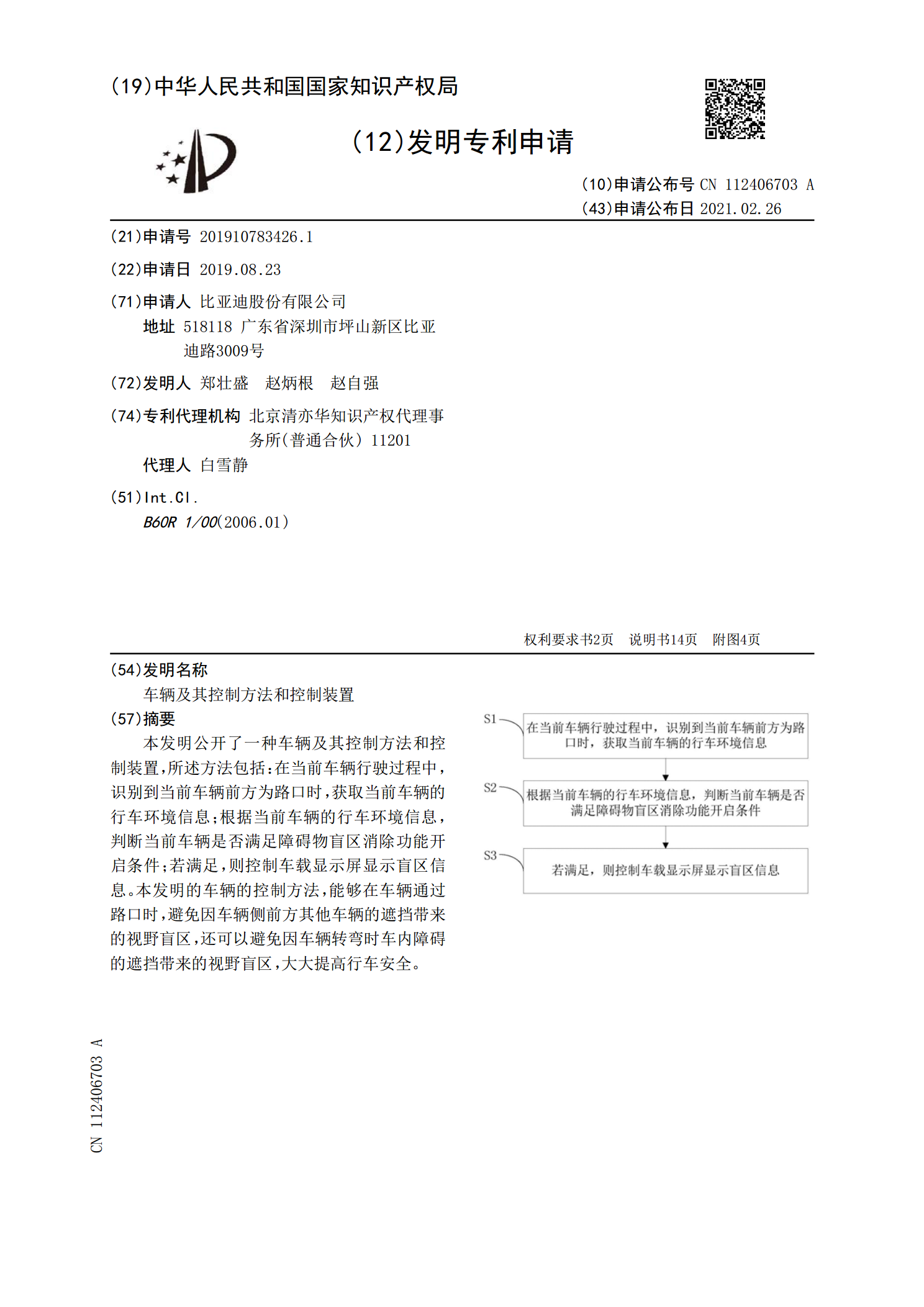
本发明公开了一种车辆及其控制方法和控制装置,所述方法包括:在当前车辆行驶过程中,识别到当前车辆前方为路口时,获取当前车辆的行车环境信息;根据当前车辆的行车环境信息,判断当前车辆是否满足障碍物盲区消除功能开启条件;若满足,则控制车载显示屏显示盲区信息。本发明的车辆的控制方法,能够在车辆通过路口时,避免因车辆侧前方其他车辆的遮挡带来的视野盲区,还可以避免因车辆转弯时车内障碍的遮挡带来的视野盲区,大大提高行车安全。

车辆及其控制方法和装置.pdf
本申请提出一种车辆及其控制方法和装置,其中,所述车辆设置有独立的电磁悬架,每个电磁悬架上对向设置有第一电磁铁总成和第二电磁铁总成,所述方法包括以下步骤:识别所述车辆的应用场景,并获取所述应用场景下当前的需求信息;根据所述需求信息,生成针对所述电磁悬架的调整指令;根据所述调整指令,对所述第一电磁铁总成和第二电磁铁总成之间的电磁力进行控制,以实现在车辆行驶场景中抑制车身倾斜或在车载娱乐场景中模拟车身倾斜,既保证了车辆的安全性和舒适性,又增添了娱乐性。

车辆及其控制方法和装置.pdf
本申请提出一种车辆及其控制方法和装置,方法包括:对乘员舱的车门处进行图像监控,获取监控图像;其中,车门处包括车门开启状态时车门与车体之间的空间;分别对监控图像进行上下车状态识别和乘客类型识别,以通过上下车状态识别获取乘客上车的第一图像和乘客下车的第二图像,通过乘客类型识别获取乘客中的儿童;通过目标深度学习模型,获取乘客中上车儿童的第一数量和下车儿童的第二数量;对锁车控制指令进行检测,当检测到锁车控制指令时,根据第一数量和第二数量,确定车内留有儿童;控制车辆不执行锁车控制指令并发送提醒信息,以实现通过上车儿
车辆及其制动控制方法和装置.pdf
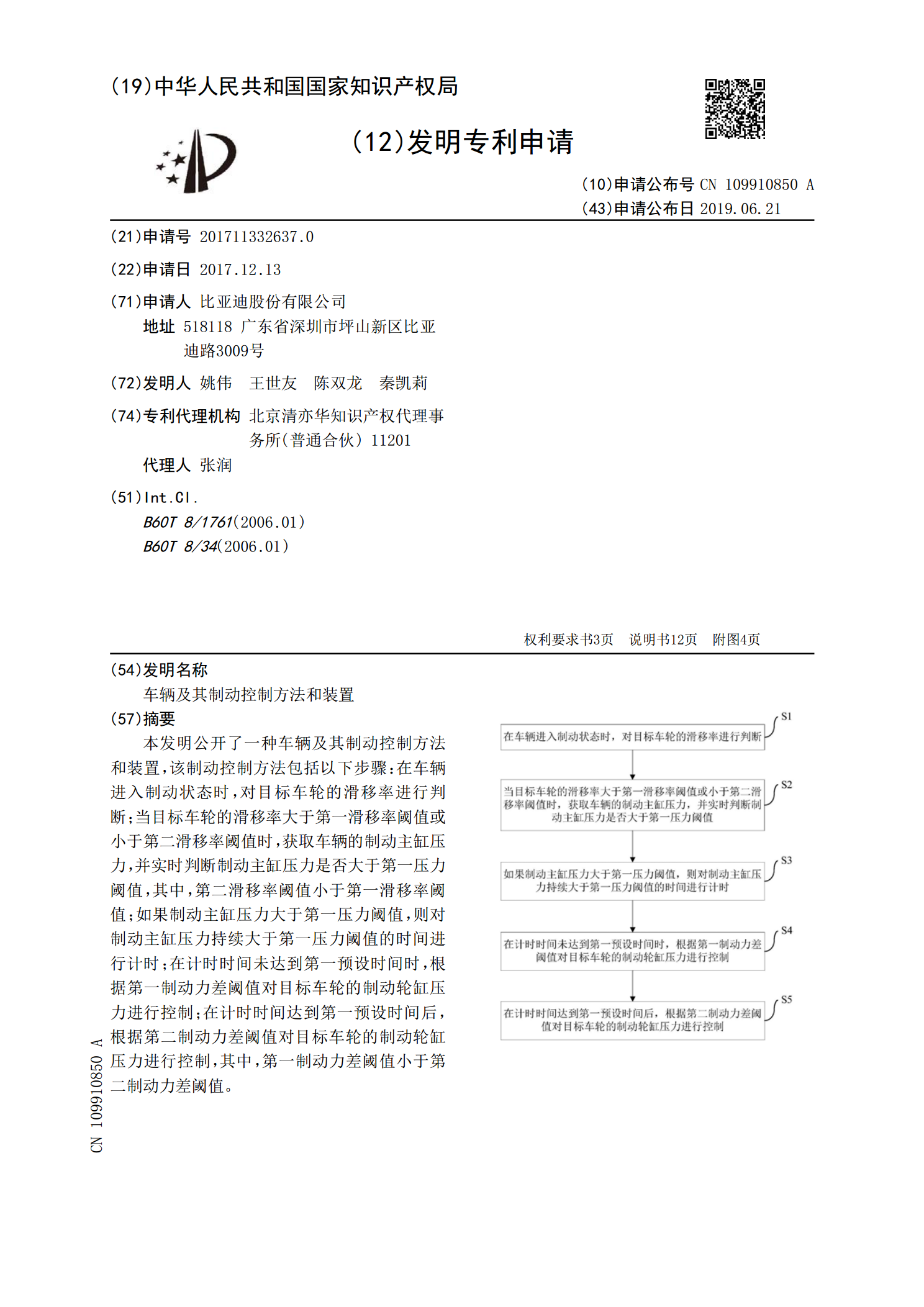
本发明公开了一种车辆及其制动控制方法和装置,该制动控制方法包括以下步骤:在车辆进入制动状态时,对目标车轮的滑移率进行判断;当目标车轮的滑移率大于第一滑移率阈值或小于第二滑移率阈值时,获取车辆的制动主缸压力,并实时判断制动主缸压力是否大于第一压力阈值,其中,第二滑移率阈值小于第一滑移率阈值;如果制动主缸压力大于第一压力阈值,则对制动主缸压力持续大于第一压力阈值的时间进行计时;在计时时间未达到第一预设时间时,根据第一制动力差阈值对目标车轮的制动轮缸压力进行控制;在计时时间达到第一预设时间后,根据第二制动力差阈