
障碍物检测方法、应用于车辆的障碍物检测设备.pdf

甲申****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

障碍物检测方法、应用于车辆的障碍物检测设备.pdf
本发明提供一种障碍物检测方法、应用于车辆的障碍物检测设备。该方法包括:根据雷达传感器获取的点云数据和图像传感器采集的图像信息,确定目标点云数据;分别对目标点云数据和图像信息进行障碍物识别,得到目标点云数据对应的第一障碍物信息和图像信息对应的第二障碍物信息;将第一障碍物信息与第二障碍物信息进行障碍物融合,确定目标障碍物。本发明能够提高目标障碍物的检测精度。

车辆与障碍物的距离检测方法及装置.pdf
本申请实施例公开了一种车辆与障碍物的距离检测方法及装置,该方法包括:获取全景图像,全景图像中包括至少一个目标对象;对全景图像进行分割处理,得到每个目标对象的对象信息,对象信息包括:类别信息、标识信息以及轮廓信息;根据对象信息,确定车辆的观察点与每个目标对象的目标距离。根据本申请的实施例,能够准确检测目标对象。
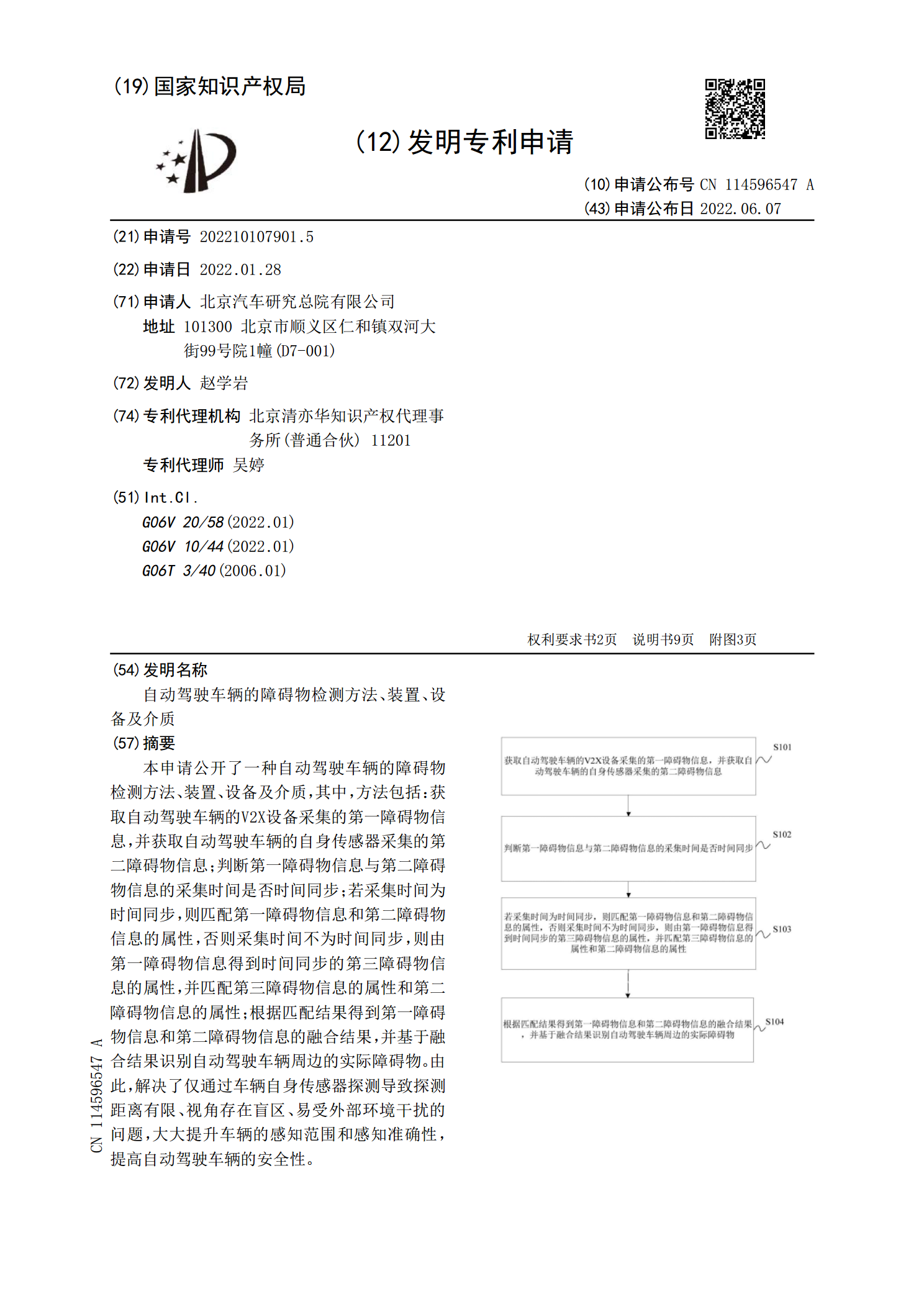
自动驾驶车辆的障碍物检测方法、装置、设备及介质.pdf
本申请公开了一种自动驾驶车辆的障碍物检测方法、装置、设备及介质,其中,方法包括:获取自动驾驶车辆的V2X设备采集的第一障碍物信息,并获取自动驾驶车辆的自身传感器采集的第二障碍物信息;判断第一障碍物信息与第二障碍物信息的采集时间是否时间同步;若采集时间为时间同步,则匹配第一障碍物信息和第二障碍物信息的属性,否则采集时间不为时间同步,则由第一障碍物信息得到时间同步的第三障碍物信息的属性,并匹配第三障碍物信息的属性和第二障碍物信息的属性;根据匹配结果得到第一障碍物信息和第二障碍物信息的融合结果,并基于融合结果识
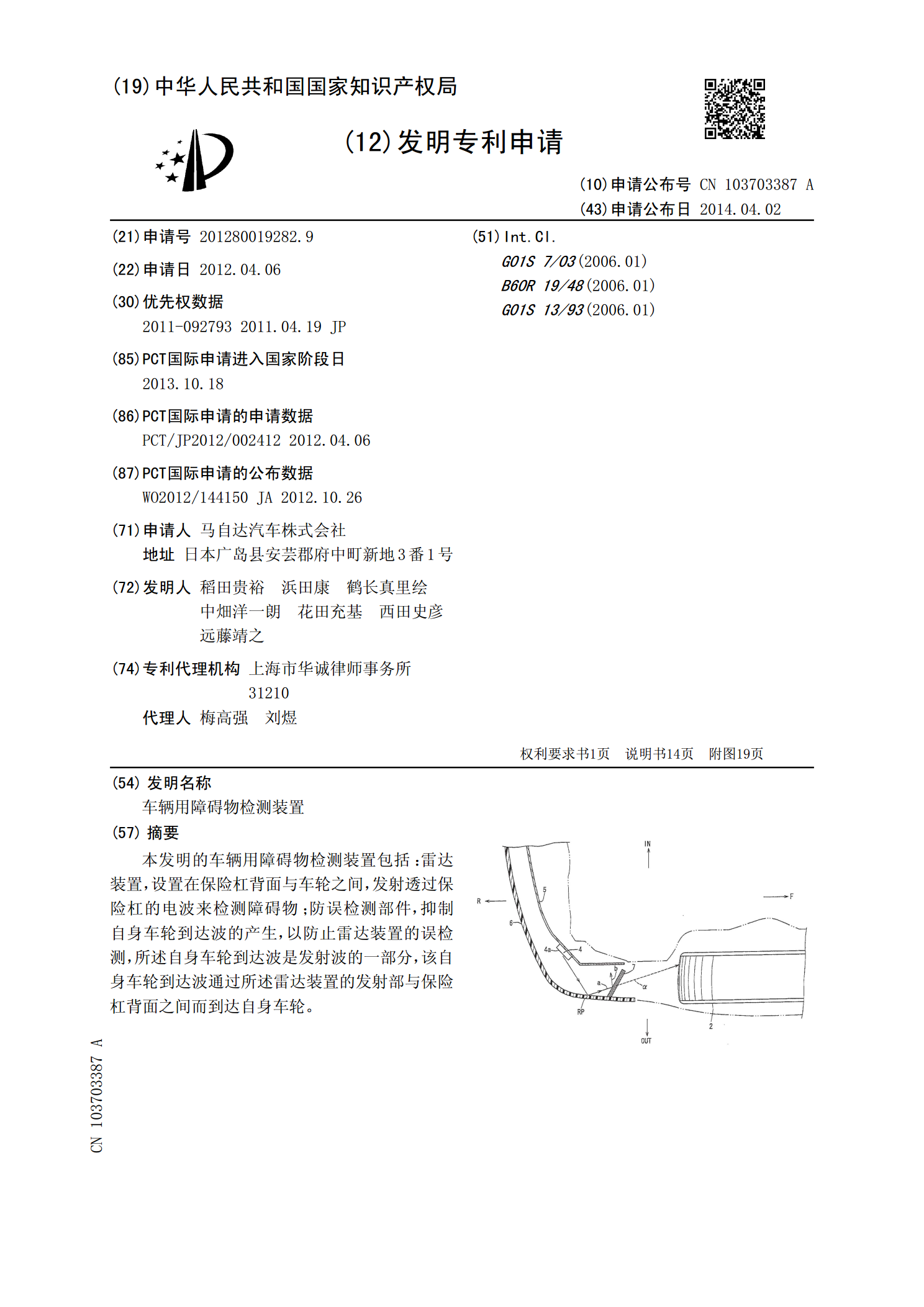
车辆用障碍物检测装置.pdf
本发明的车辆用障碍物检测装置包括:雷达装置,设置在保险杠背面与车轮之间,发射透过保险杠的电波来检测障碍物;防误检测部件,抑制自身车轮到达波的产生,以防止雷达装置的误检测,所述自身车轮到达波是发射波的一部分,该自身车轮到达波通过所述雷达装置的发射部与保险杠背面之间而到达自身车轮。
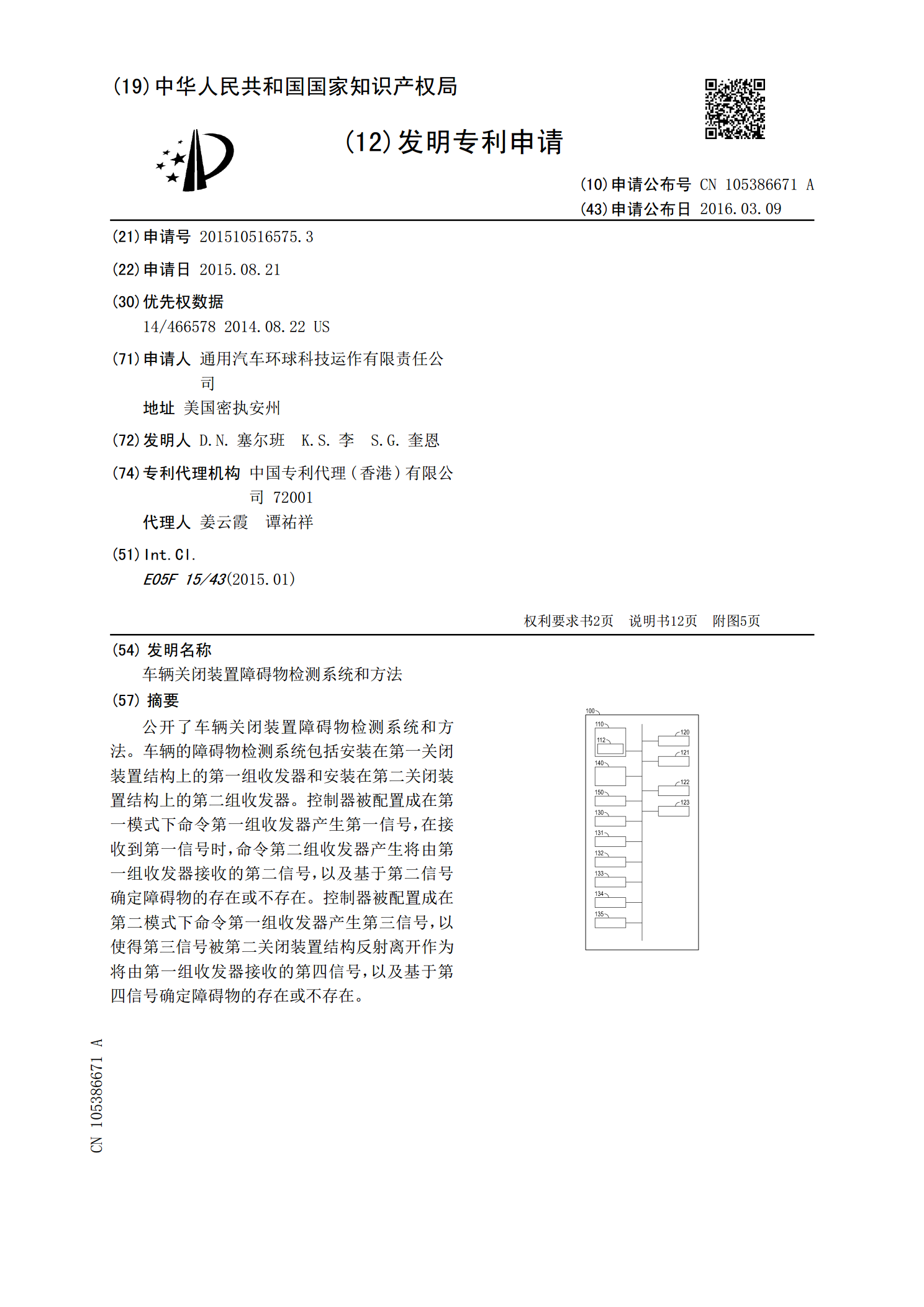
车辆关闭装置障碍物检测系统和方法.pdf
公开了车辆关闭装置障碍物检测系统和方法。车辆的障碍物检测系统包括安装在第一关闭装置结构上的第一组收发器和安装在第二关闭装置结构上的第二组收发器。控制器被配置成在第一模式下命令第一组收发器产生第一信号,在接收到第一信号时,命令第二组收发器产生将由第一组收发器接收的第二信号,以及基于第二信号确定障碍物的存在或不存在。控制器被配置成在第二模式下命令第一组收发器产生第三信号,以使得第三信号被第二关闭装置结构反射离开作为将由第一组收发器接收的第四信号,以及基于第四信号确定障碍物的存在或不存在。