
车辆与障碍物的距离检测方法及装置.pdf

努力****振宇


1/10

2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆与障碍物的距离检测方法及装置.pdf
本申请实施例公开了一种车辆与障碍物的距离检测方法及装置,该方法包括:获取全景图像,全景图像中包括至少一个目标对象;对全景图像进行分割处理,得到每个目标对象的对象信息,对象信息包括:类别信息、标识信息以及轮廓信息;根据对象信息,确定车辆的观察点与每个目标对象的目标距离。根据本申请的实施例,能够准确检测目标对象。
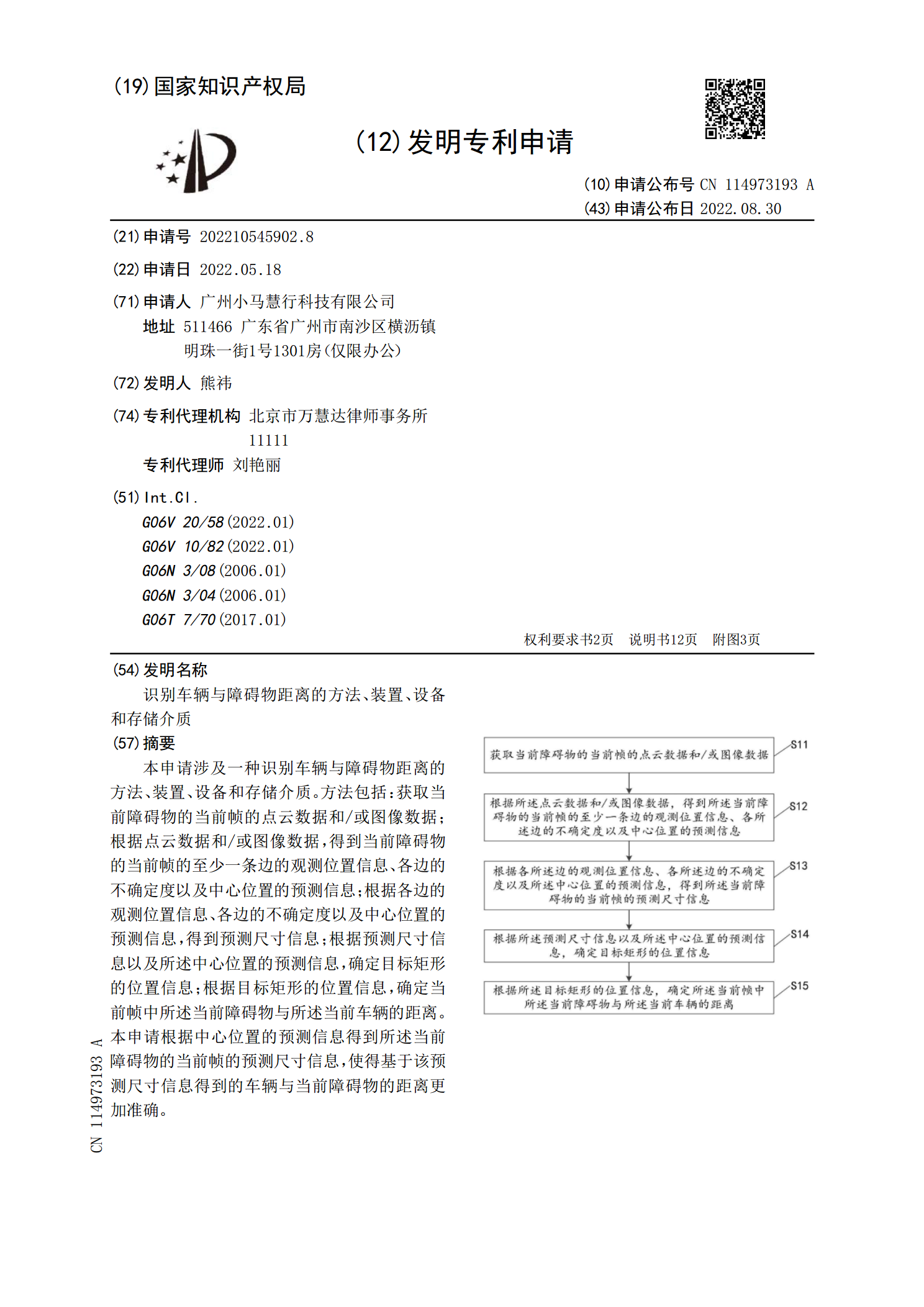
识别车辆与障碍物距离的方法、装置、设备和存储介质.pdf
本申请涉及一种识别车辆与障碍物距离的方法、装置、设备和存储介质。方法包括:获取当前障碍物的当前帧的点云数据和/或图像数据;根据点云数据和/或图像数据,得到当前障碍物的当前帧的至少一条边的观测位置信息、各边的不确定度以及中心位置的预测信息;根据各边的观测位置信息、各边的不确定度以及中心位置的预测信息,得到预测尺寸信息;根据预测尺寸信息以及所述中心位置的预测信息,确定目标矩形的位置信息;根据目标矩形的位置信息,确定当前帧中所述当前障碍物与所述当前车辆的距离。本申请根据中心位置的预测信息得到所述当前障碍物的当前

一种车辆与障碍物之间距离确定方法及装置.pdf
本发明提供了一种车辆与障碍物之间距离确定方法及装置,所述方法包括:在障碍物进入车辆雷达盲区前,确定所述障碍物朝向所述车辆的移动速度;当所述障碍物进入所述车辆雷达探测盲区时,记录所述车辆与所述障碍物之间的初始距离;确定所述车辆,朝向所述障碍物的第一移动距离;根据所述障碍物朝向所述车辆的移动速度,确定所述障碍物朝向所述车辆的第二移动距离;根据所述初始距离、所述第一移动距离、所述第二移动距离,确定在所述障碍物进入所述车辆雷达探测盲区后,所述车辆与所述障碍物之间的距离。本发明所述的车辆与障碍物之间距离确定方法,能

基线距离可调的双目障碍物检测方法、装置及系统.pdf
本发明实施例提供一种基线距离可调的双目障碍物检测方法、装置及系统,其中,该基线距离可调的双目障碍物检测方法包括:获取车辆的行驶速度和/或档位信息;根据所述行驶速度和/或档位信息确定双目相机之间的目标基线距离;根据所述目标基线距离调节双目相机之间的当前基线距离,并采用基线距离调节后的双目相机进行障碍物检测。本发明通过根据车速和/或档位信息动态调整双目相机之间的基线距离,实现基线距离可调的双目障碍物检测,解决了现有技术中由于双目相机之间的基线距离固定而导致的检测范围固定的问题,大大增强了用户的体验。
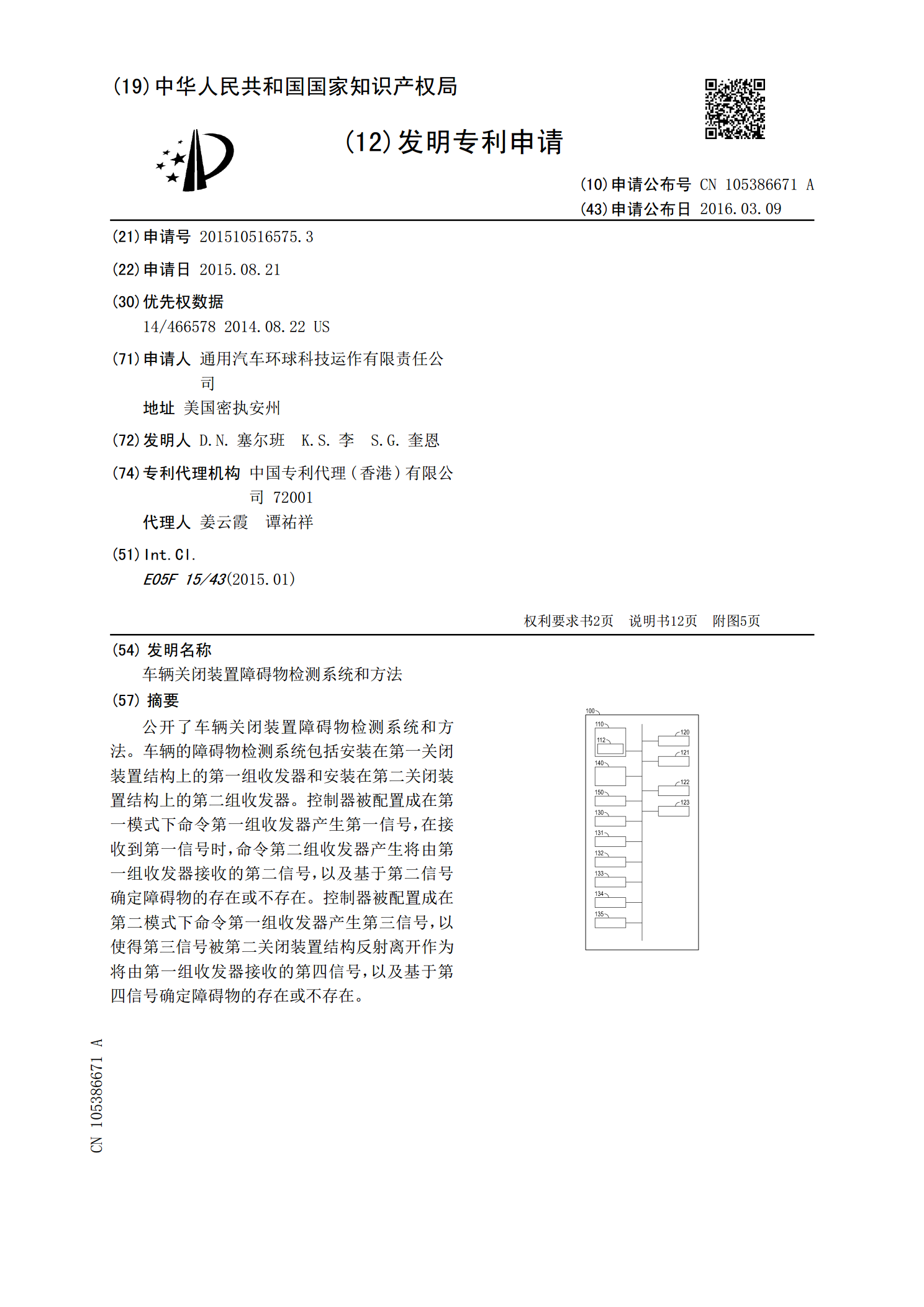
车辆关闭装置障碍物检测系统和方法.pdf
公开了车辆关闭装置障碍物检测系统和方法。车辆的障碍物检测系统包括安装在第一关闭装置结构上的第一组收发器和安装在第二关闭装置结构上的第二组收发器。控制器被配置成在第一模式下命令第一组收发器产生第一信号,在接收到第一信号时,命令第二组收发器产生将由第一组收发器接收的第二信号,以及基于第二信号确定障碍物的存在或不存在。控制器被配置成在第二模式下命令第一组收发器产生第三信号,以使得第三信号被第二关闭装置结构反射离开作为将由第一组收发器接收的第四信号,以及基于第四信号确定障碍物的存在或不存在。