
一种点云数据处理方法、装置、设备及存储介质.pdf

宏硕****mo


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种点云数据处理方法、装置、设备及存储介质.pdf
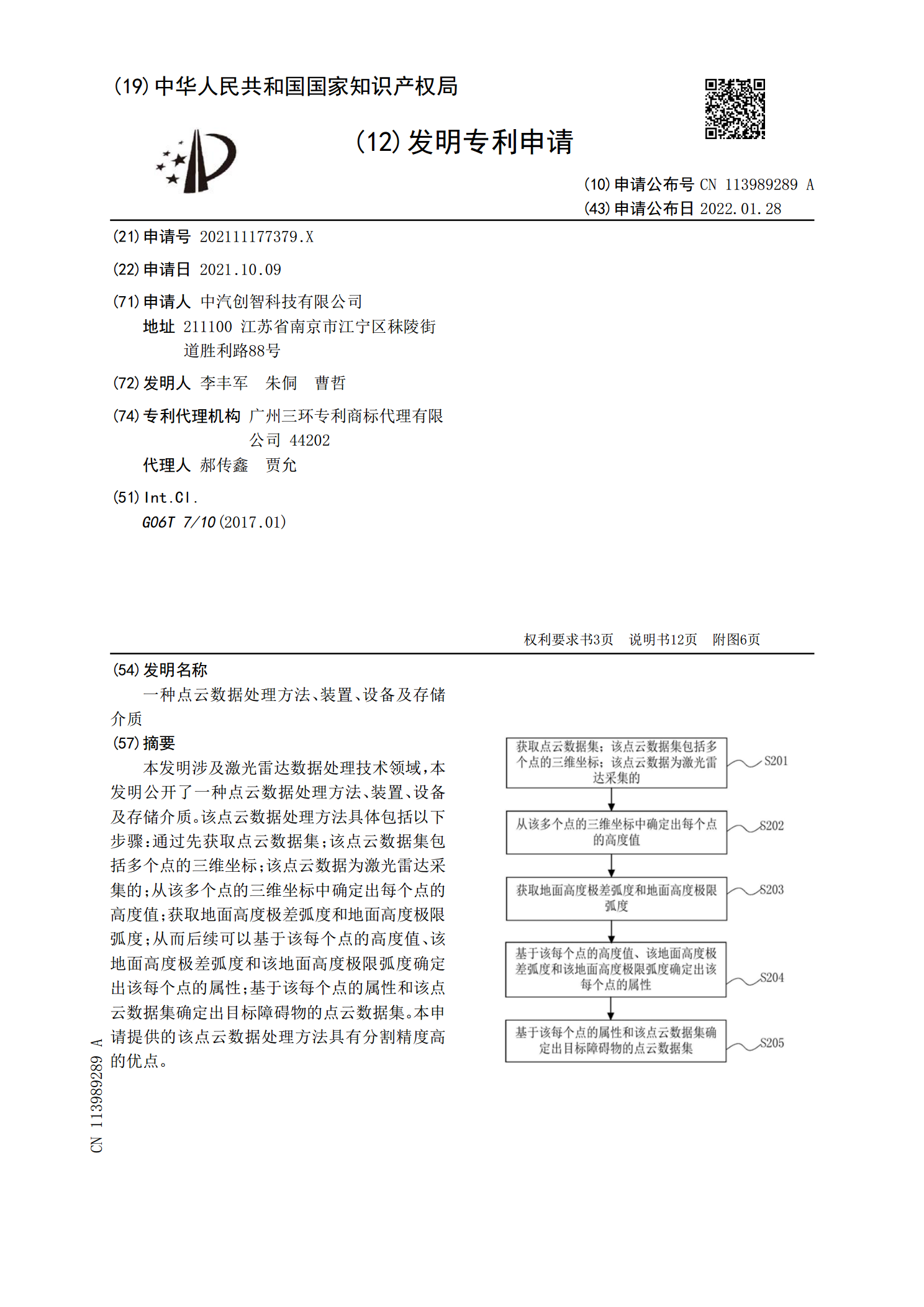
本发明涉及激光雷达数据处理技术领域,本发明公开了一种点云数据处理方法、装置、设备及存储介质。该点云数据处理方法具体包括以下步骤:通过先获取点云数据集;该点云数据集包括多个点的三维坐标;该点云数据为激光雷达采集的;从该多个点的三维坐标中确定出每个点的高度值;获取地面高度极差弧度和地面高度极限弧度;从而后续可以基于该每个点的高度值、该地面高度极差弧度和该地面高度极限弧度确定出该每个点的属性;基于该每个点的属性和该点云数据集确定出目标障碍物的点云数据集。本申请提供的该点云数据处理方法具有分割精度高的优点。

雷达点云数据处理方法、装置、设备以及存储介质.pdf
本公开提供了雷达点云数据处理的方法、装置、设备以及存储介质,涉及雷达点云、自动驾驶、深度学习技术领域。具体实现方案为:利用雷达点云数据中的目标检测框,确定目标物体所处的目标位置区域;将处于目标位置区域内的目标物体的每个点从雷达点云数据中移除;将物体模型添加到目标位置区域。本公开的实施例,通过将目标物体从雷达点云数据中移除,并将需要的三维模型添加到雷达点云数据中的目标位置区域,可以得到更加丰富的雷达点云数据。
点云数据处理方法、装置、存储介质及电子装置.pdf
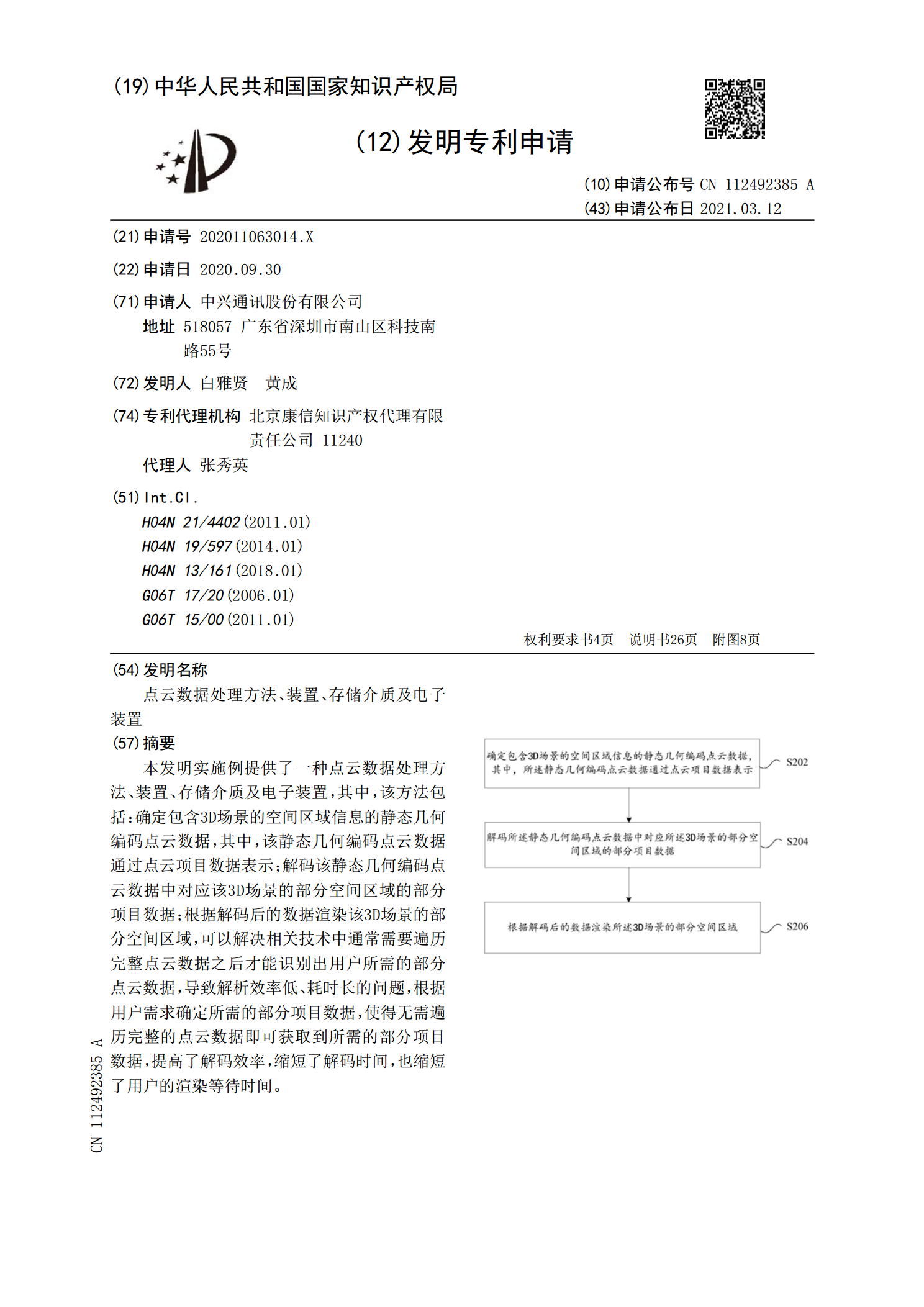
本发明实施例提供了一种点云数据处理方法、装置、存储介质及电子装置,其中,该方法包括:确定包含3D场景的空间区域信息的静态几何编码点云数据,其中,该静态几何编码点云数据通过点云项目数据表示;解码该静态几何编码点云数据中对应该3D场景的部分空间区域的部分项目数据;根据解码后的数据渲染该3D场景的部分空间区域,可以解决相关技术中通常需要遍历完整点云数据之后才能识别出用户所需的部分点云数据,导致解析效率低、耗时长的问题,根据用户需求确定所需的部分项目数据,使得无需遍历完整的点云数据即可获取到所需的部分项目数据,提
点云数据处理方法、设备及存储介质.pdf
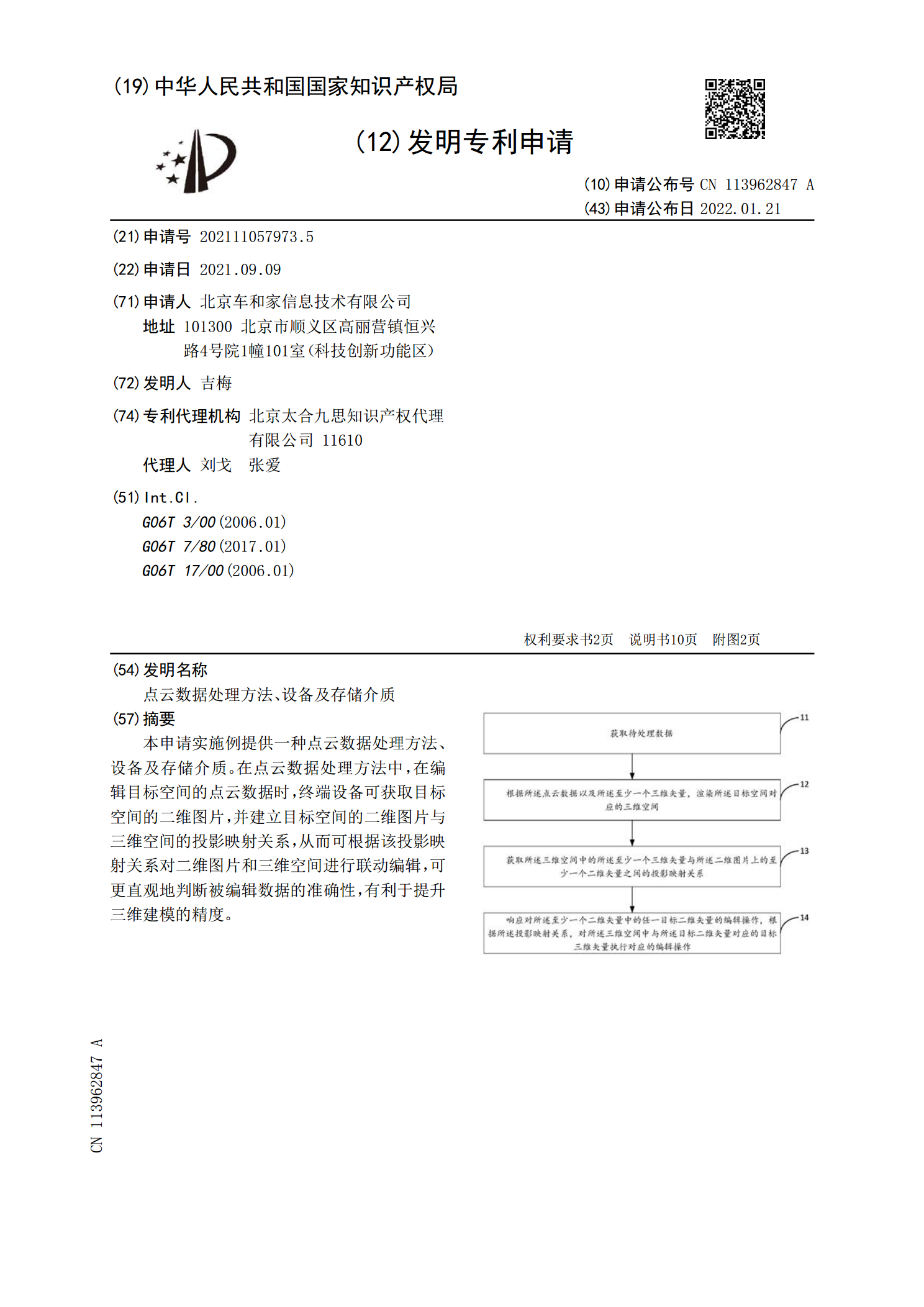
本申请实施例提供一种点云数据处理方法、设备及存储介质。在点云数据处理方法中,在编辑目标空间的点云数据时,终端设备可获取目标空间的二维图片,并建立目标空间的二维图片与三维空间的投影映射关系,从而可根据该投影映射关系对二维图片和三维空间进行联动编辑,可更直观地判断被编辑数据的准确性,有利于提升三维建模的精度。
点云存储方法、装置、设备及存储介质.pdf
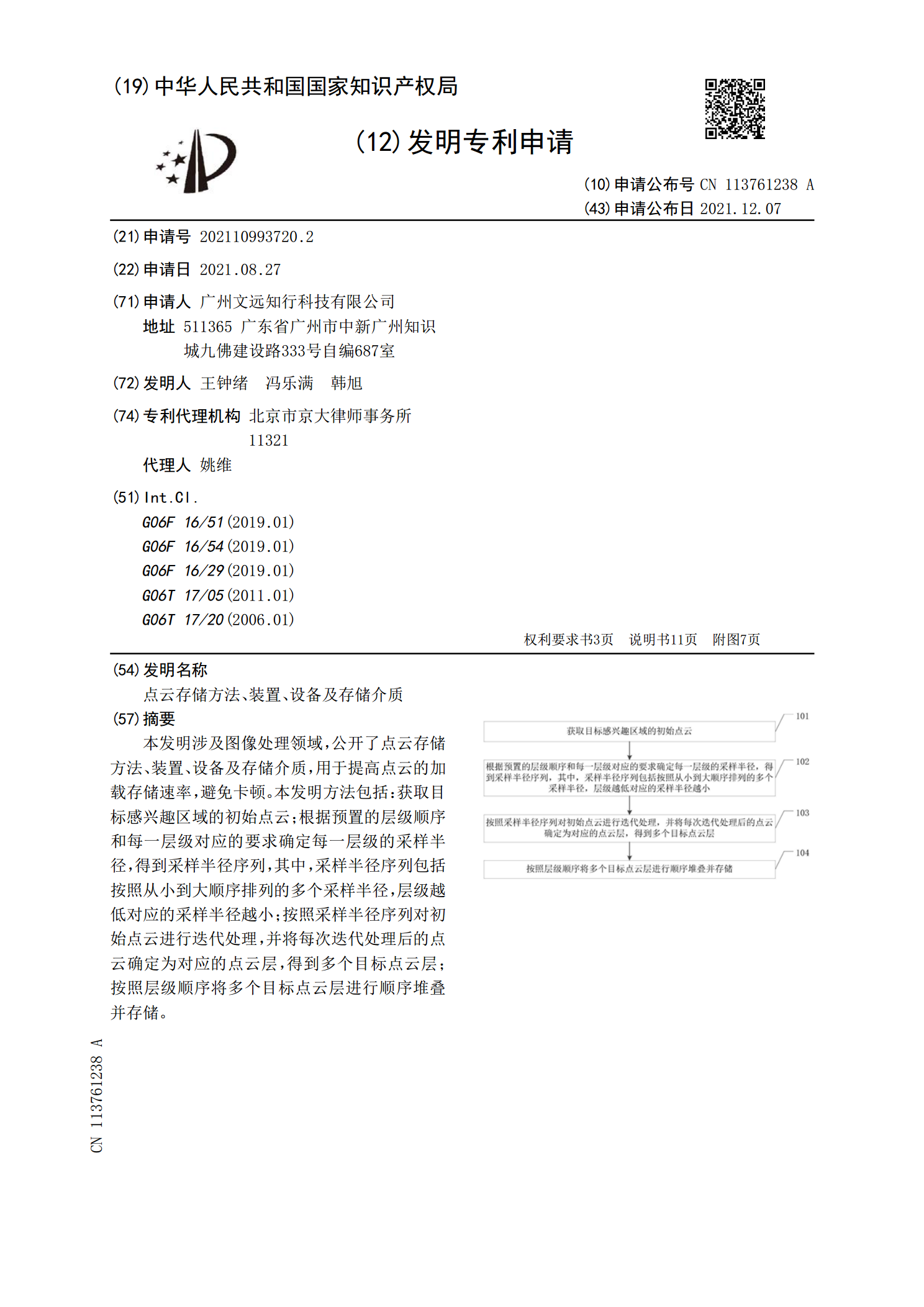
本发明涉及图像处理领域,公开了点云存储方法、装置、设备及存储介质,用于提高点云的加载存储速率,避免卡顿。本发明方法包括:获取目标感兴趣区域的初始点云;根据预置的层级顺序和每一层级对应的要求确定每一层级的采样半径,得到采样半径序列,其中,采样半径序列包括按照从小到大顺序排列的多个采样半径,层级越低对应的采样半径越小;按照采样半径序列对初始点云进行迭代处理,并将每次迭代处理后的点云确定为对应的点云层,得到多个目标点云层;按照层级顺序将多个目标点云层进行顺序堆叠并存储。